
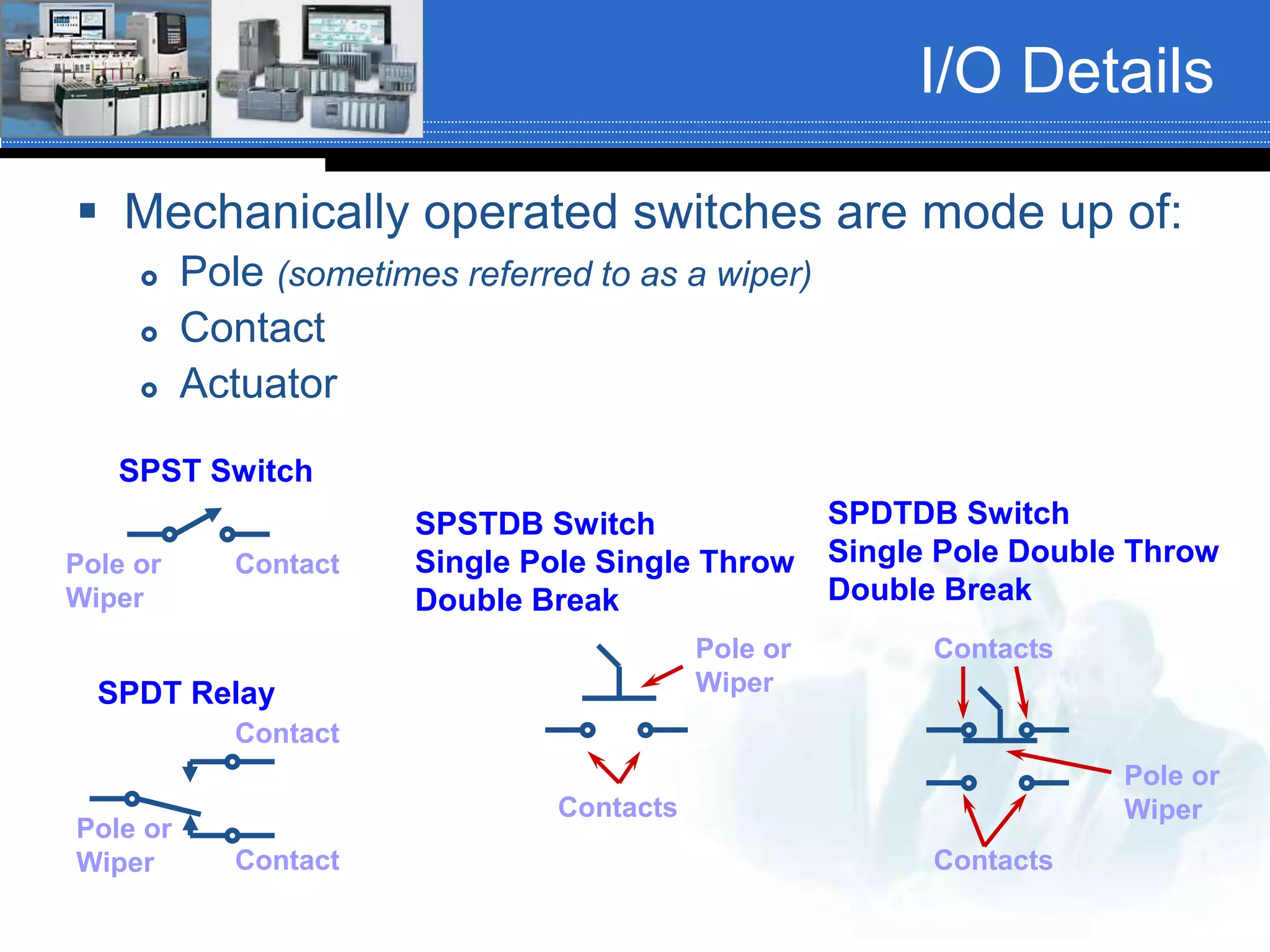
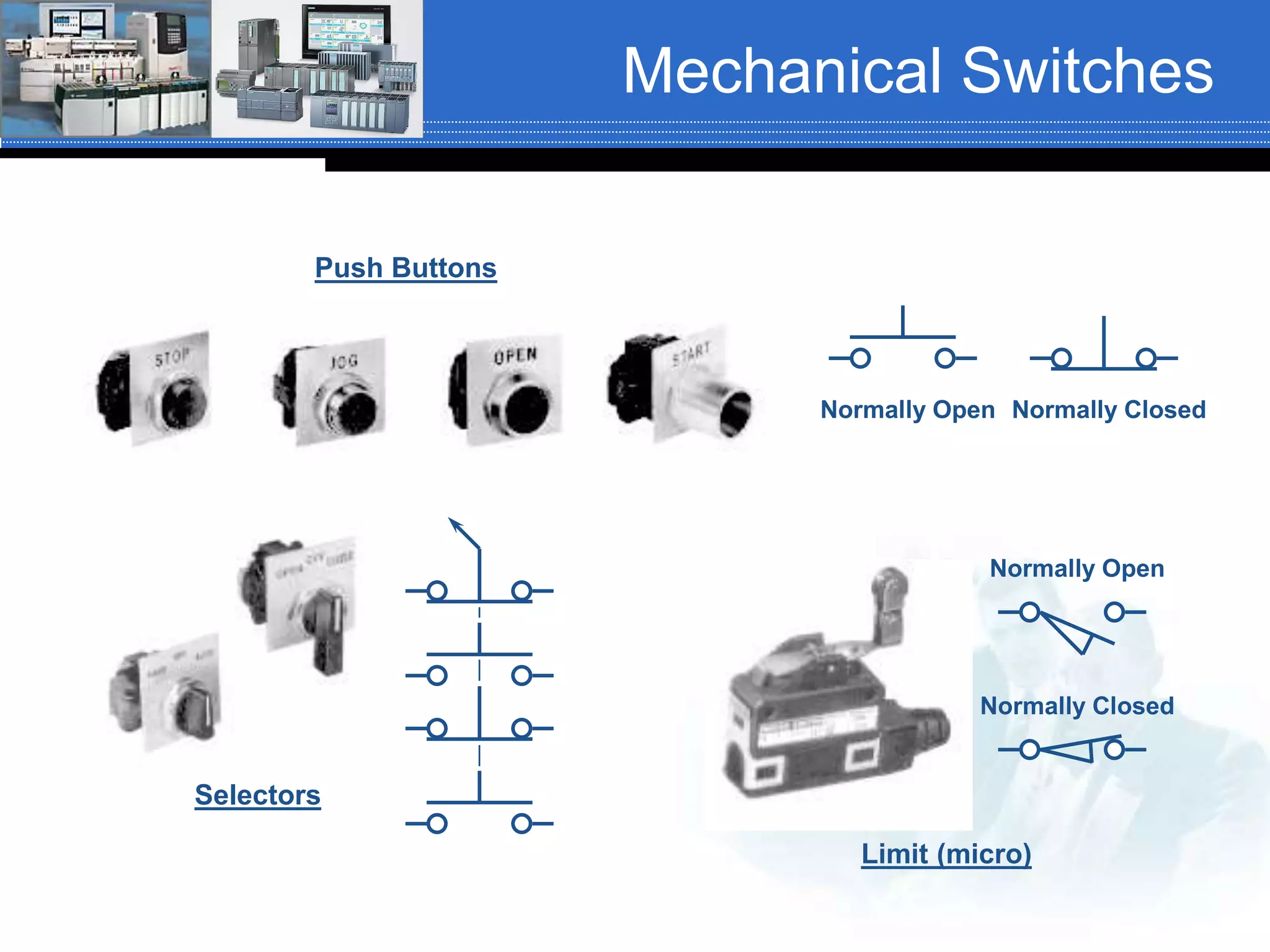
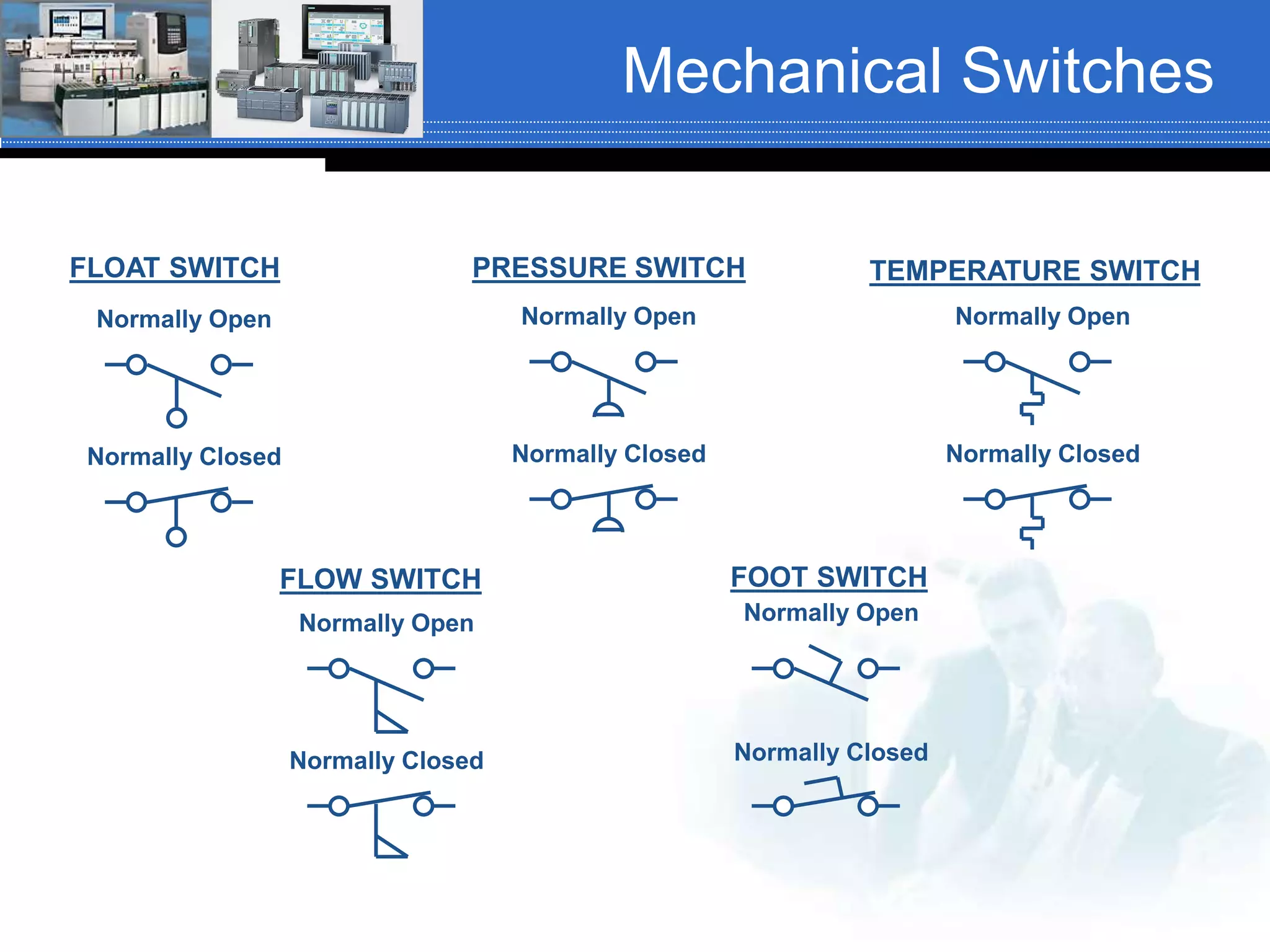

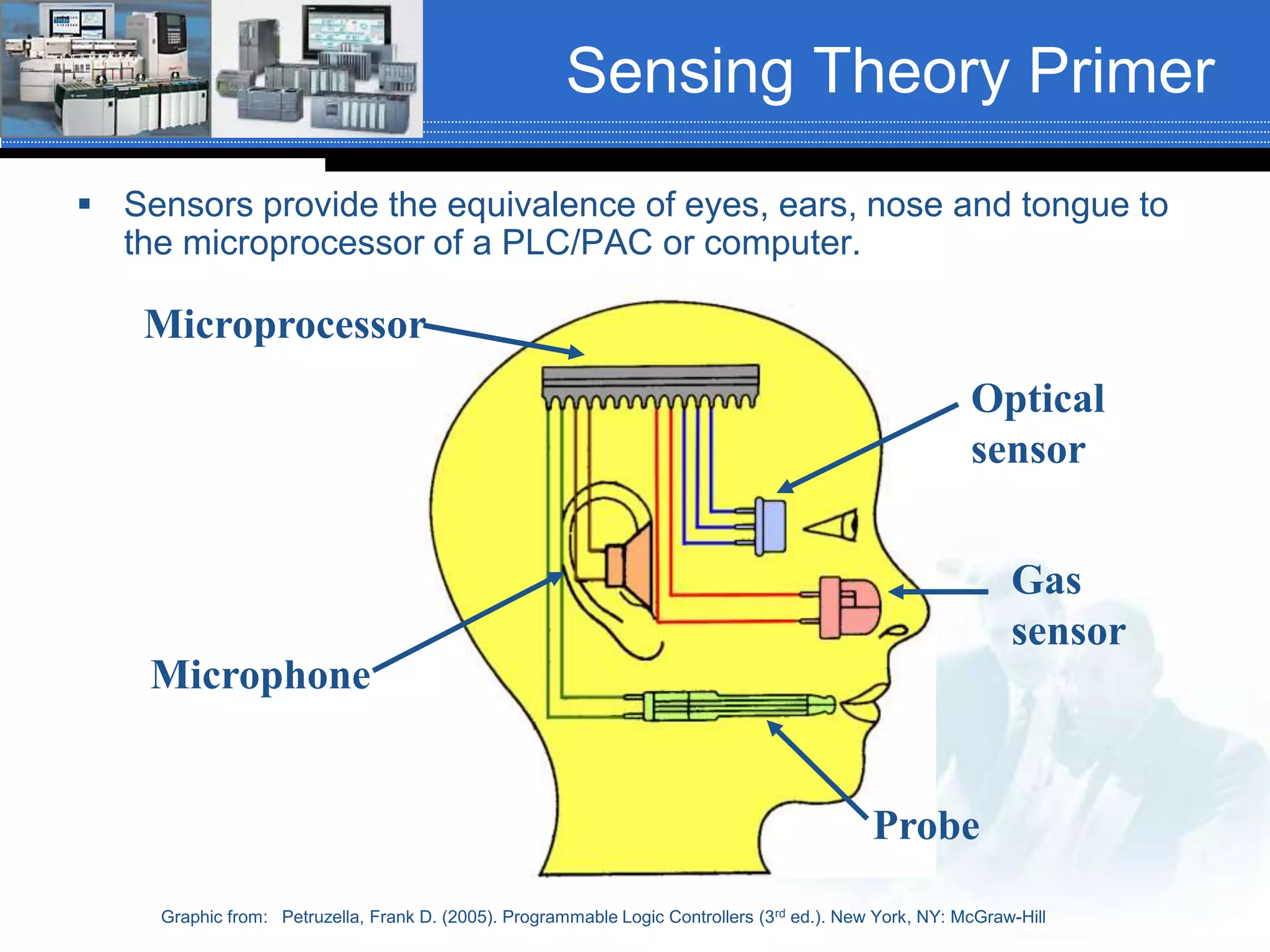
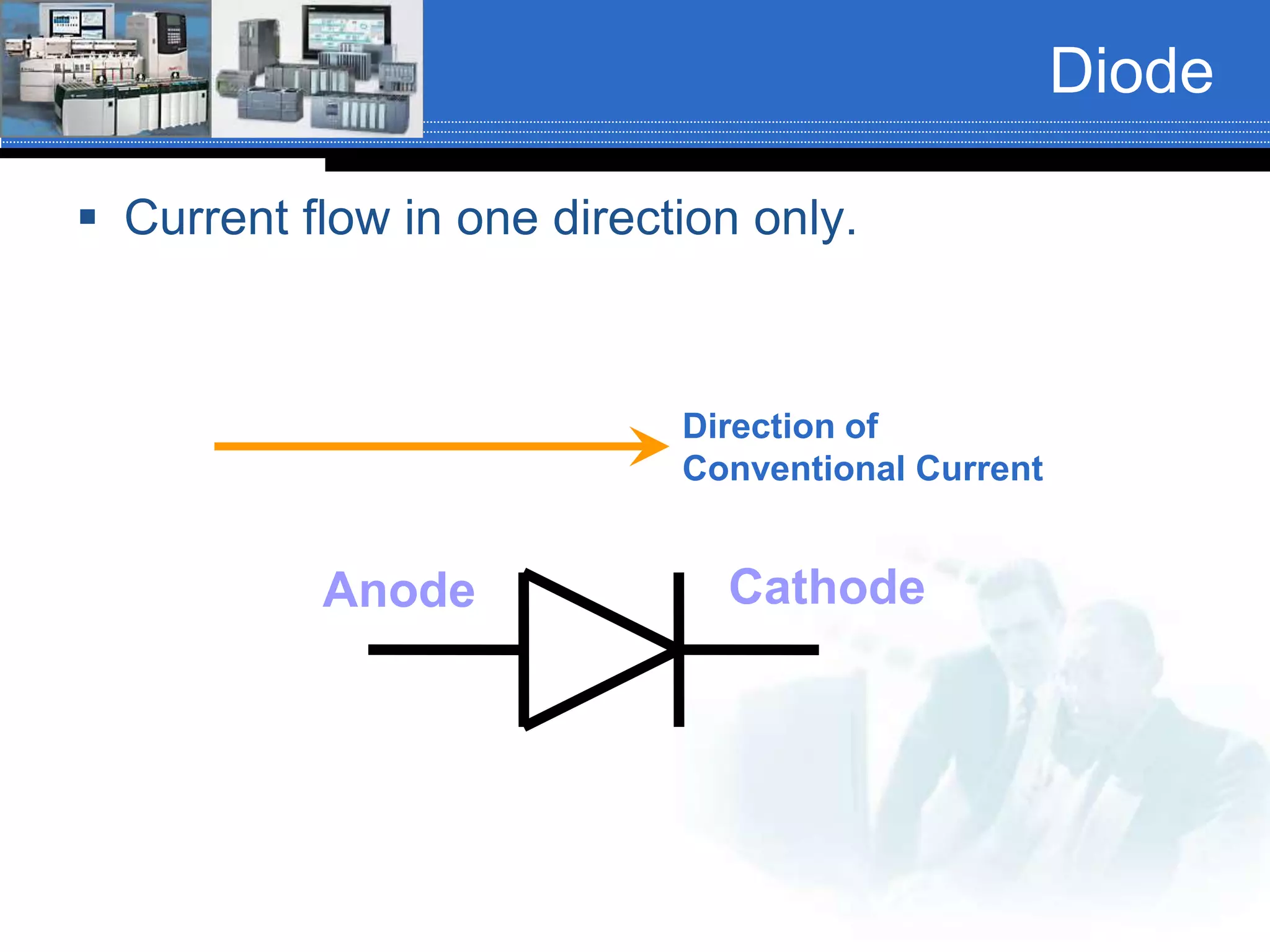
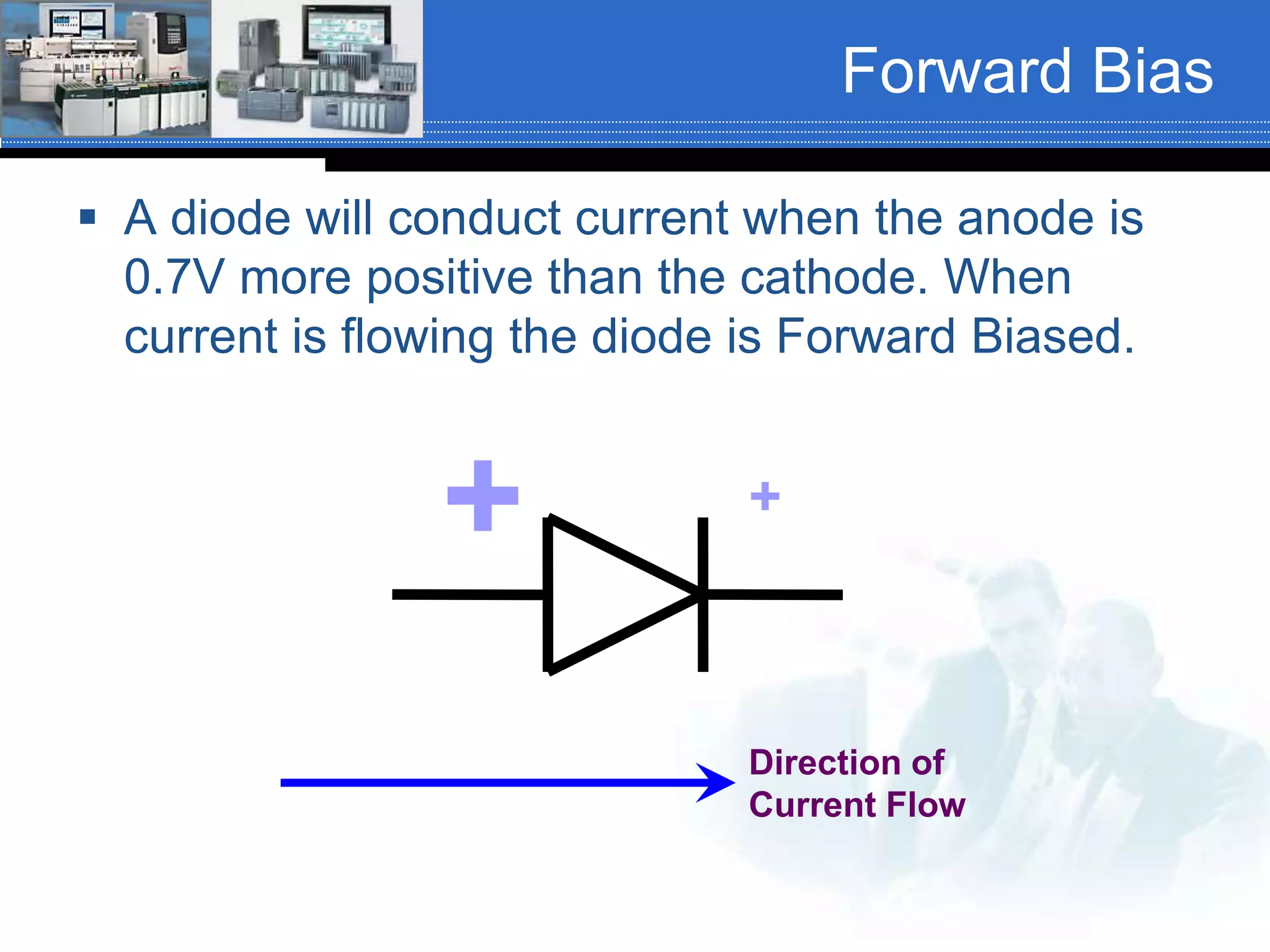
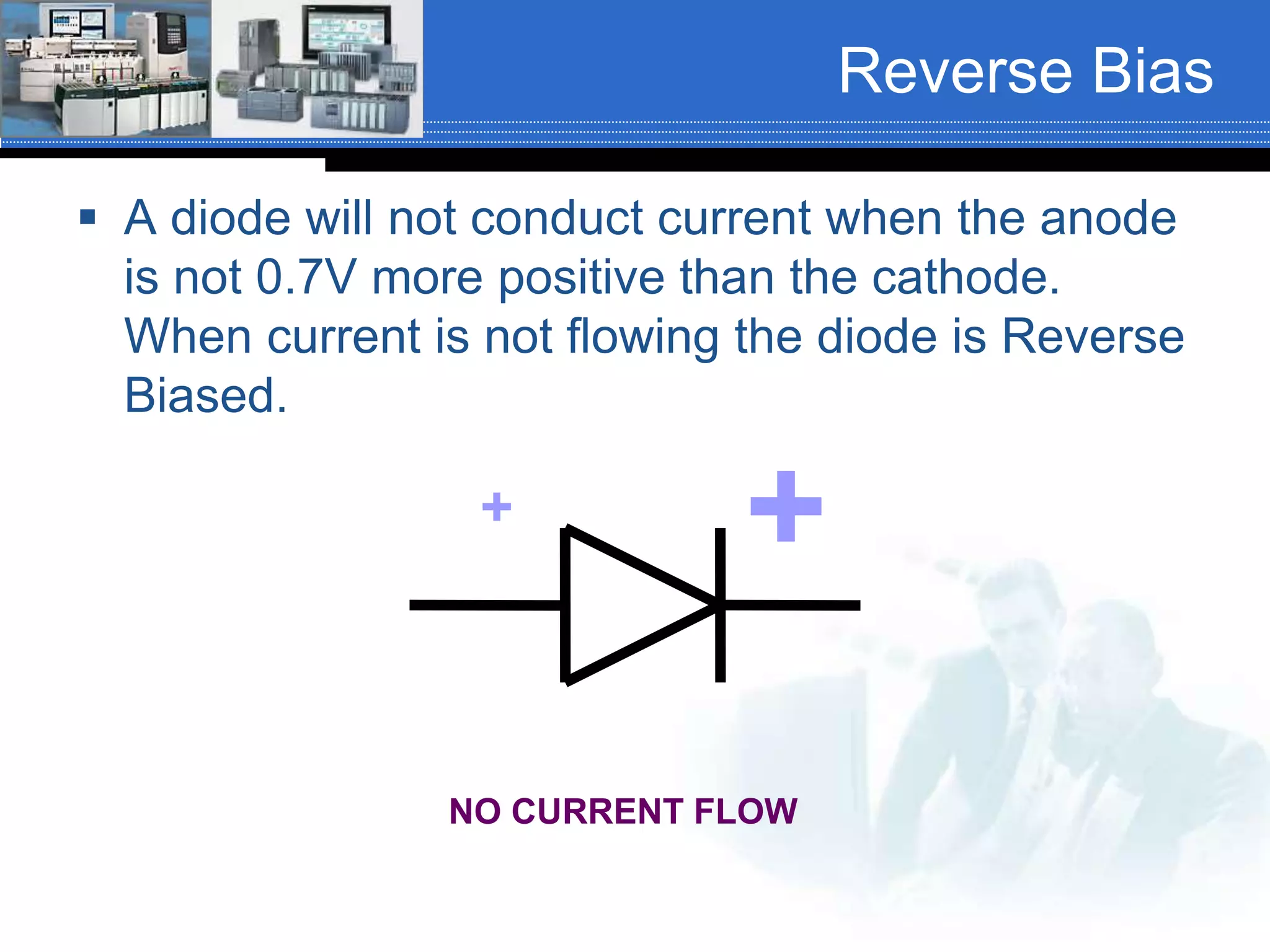
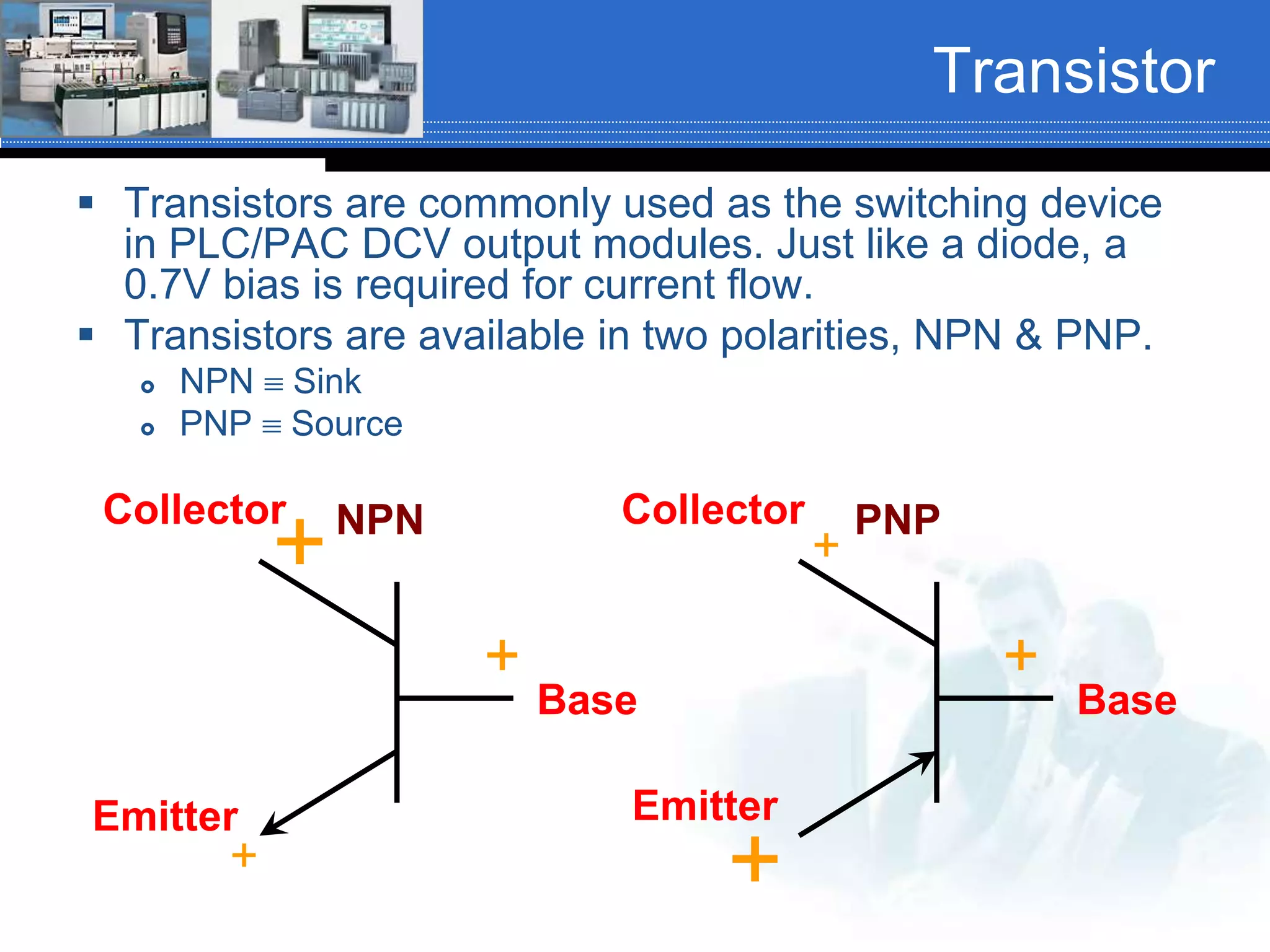
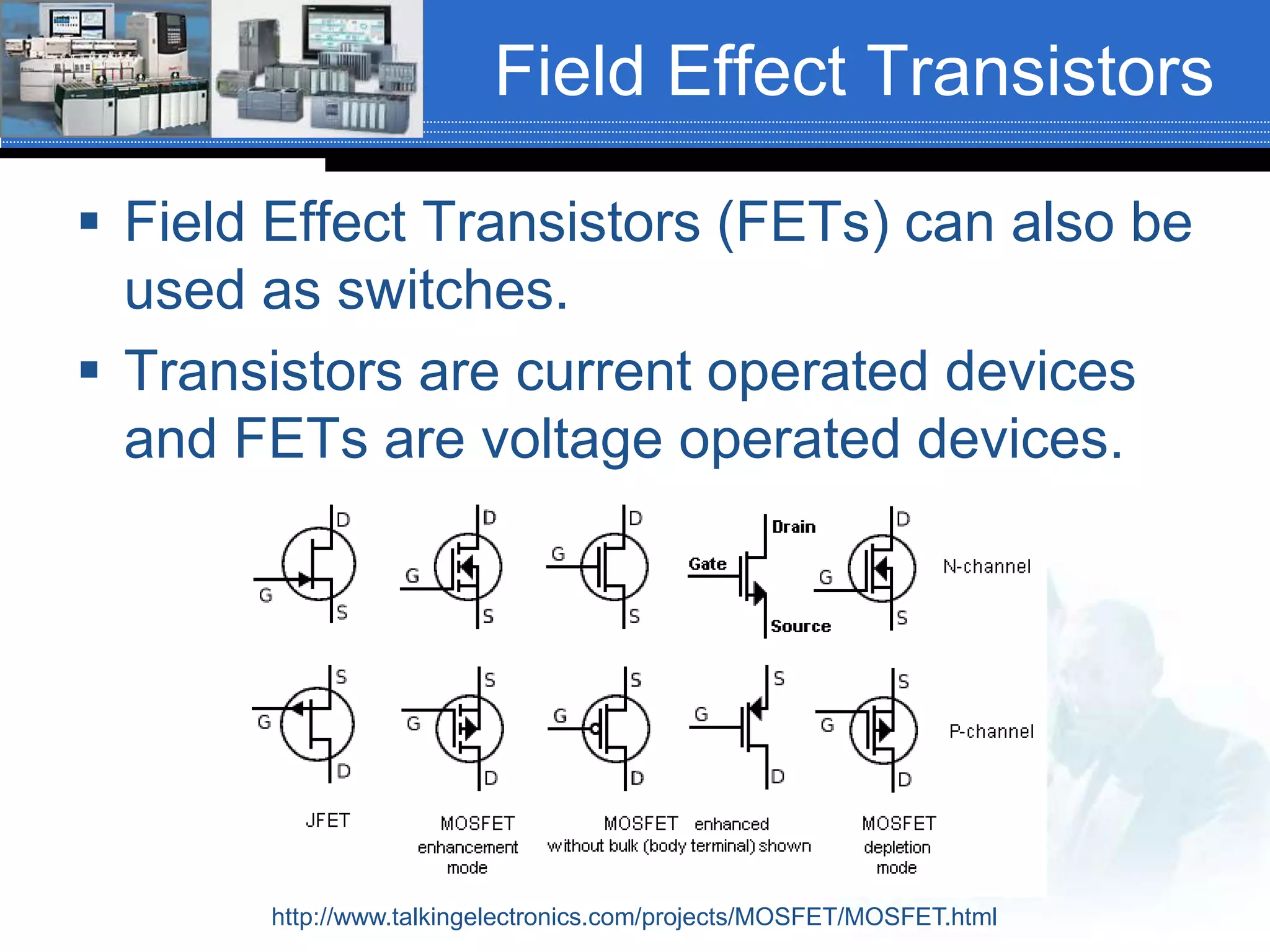
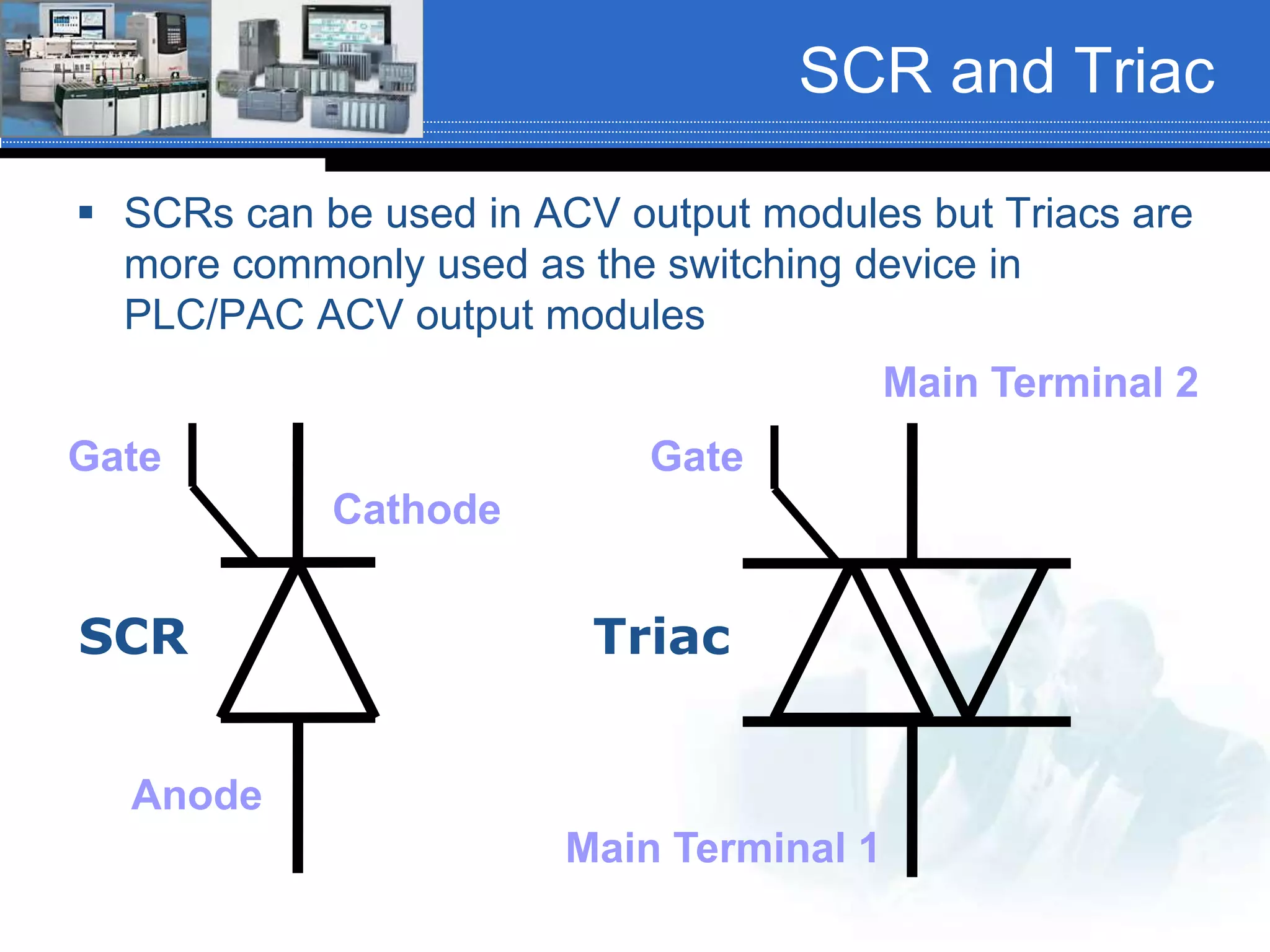
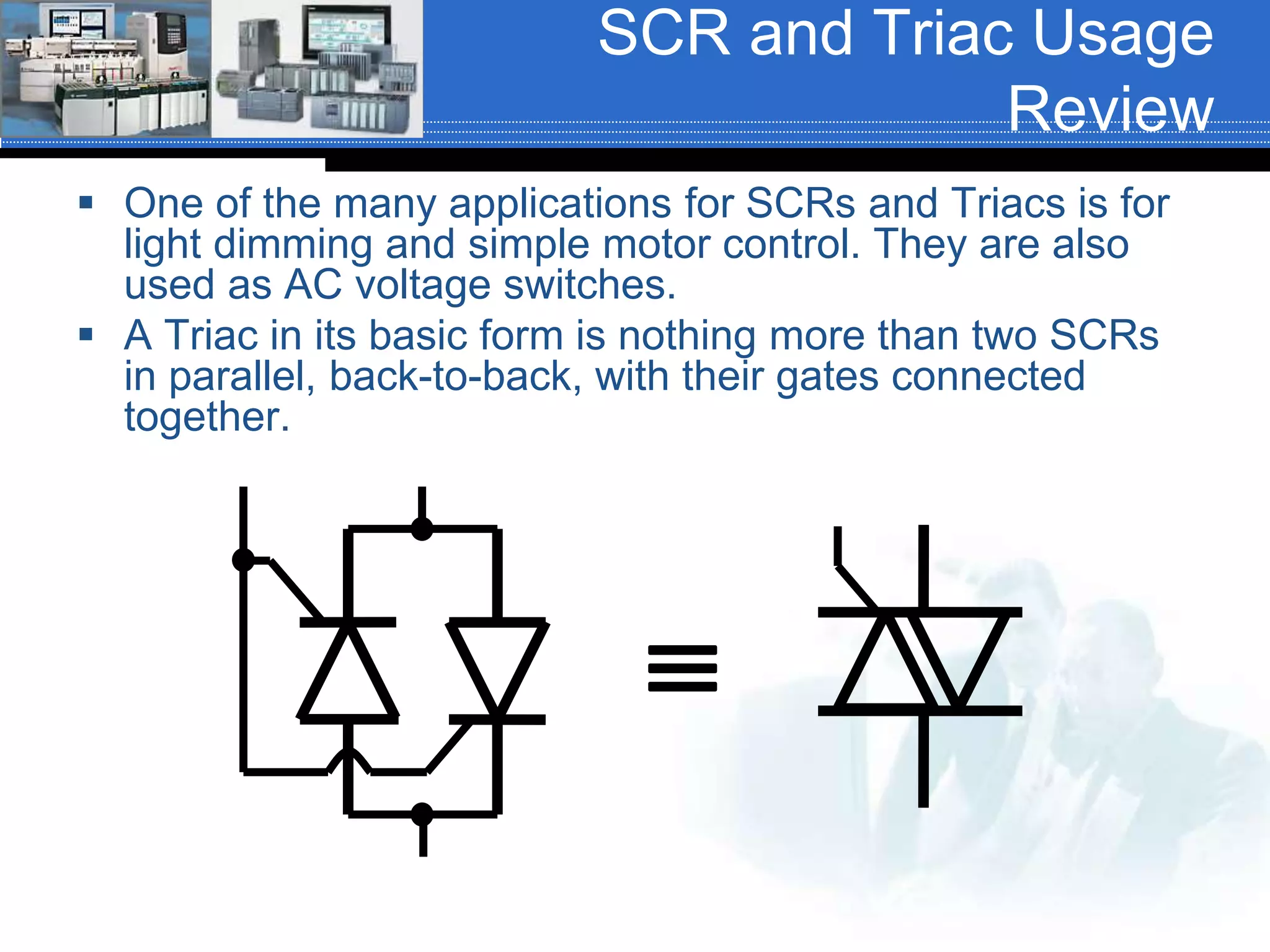
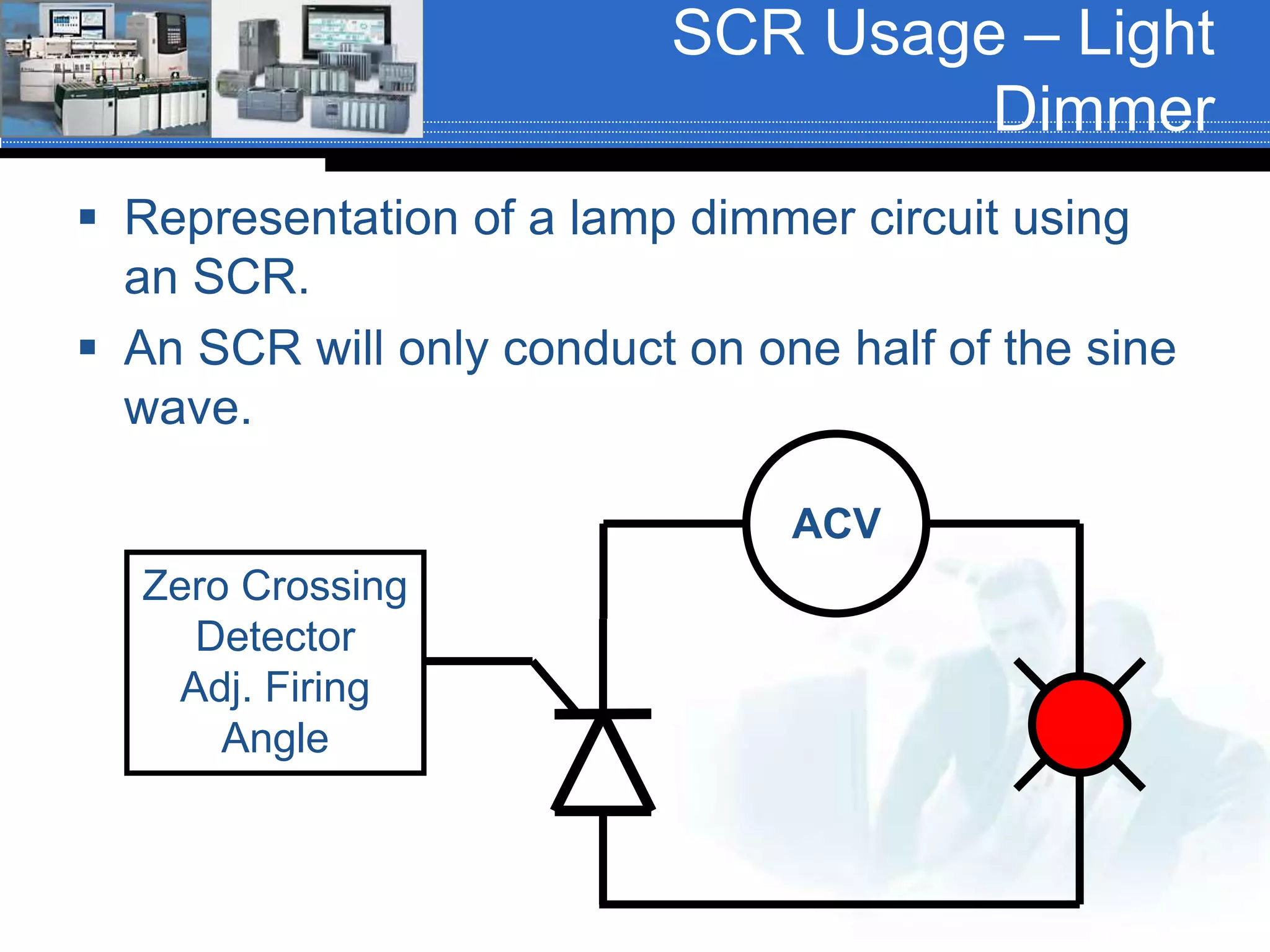
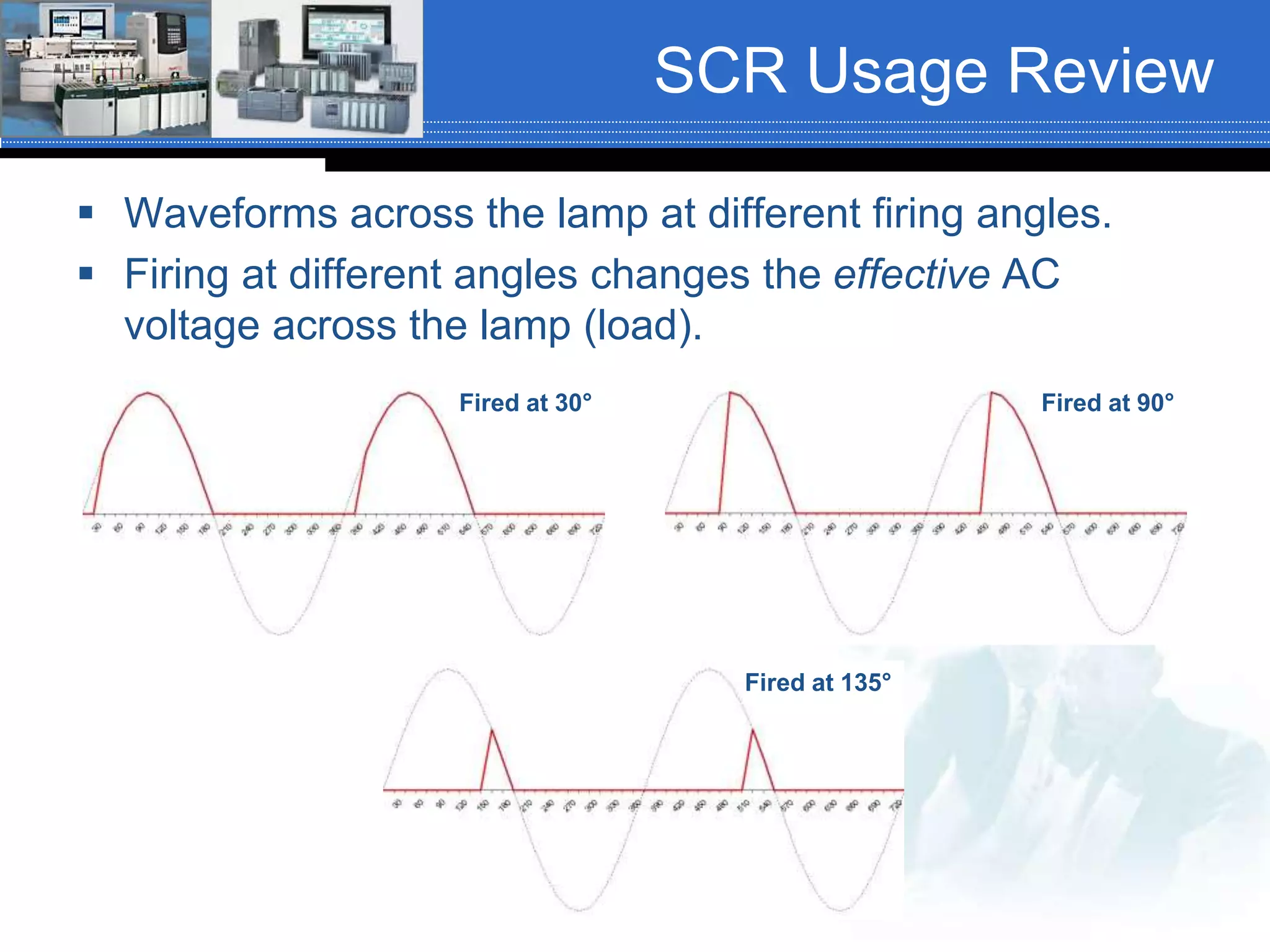
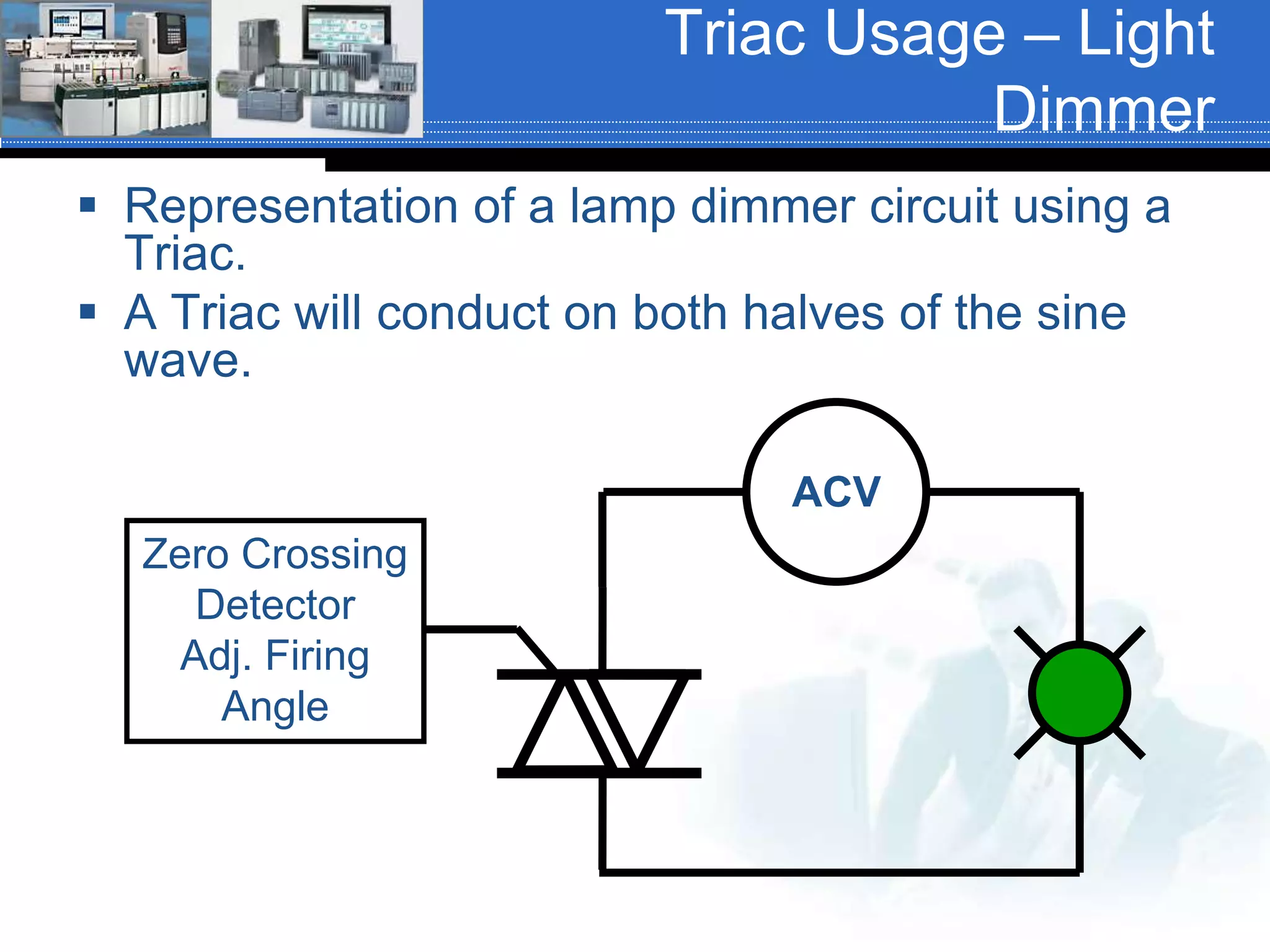
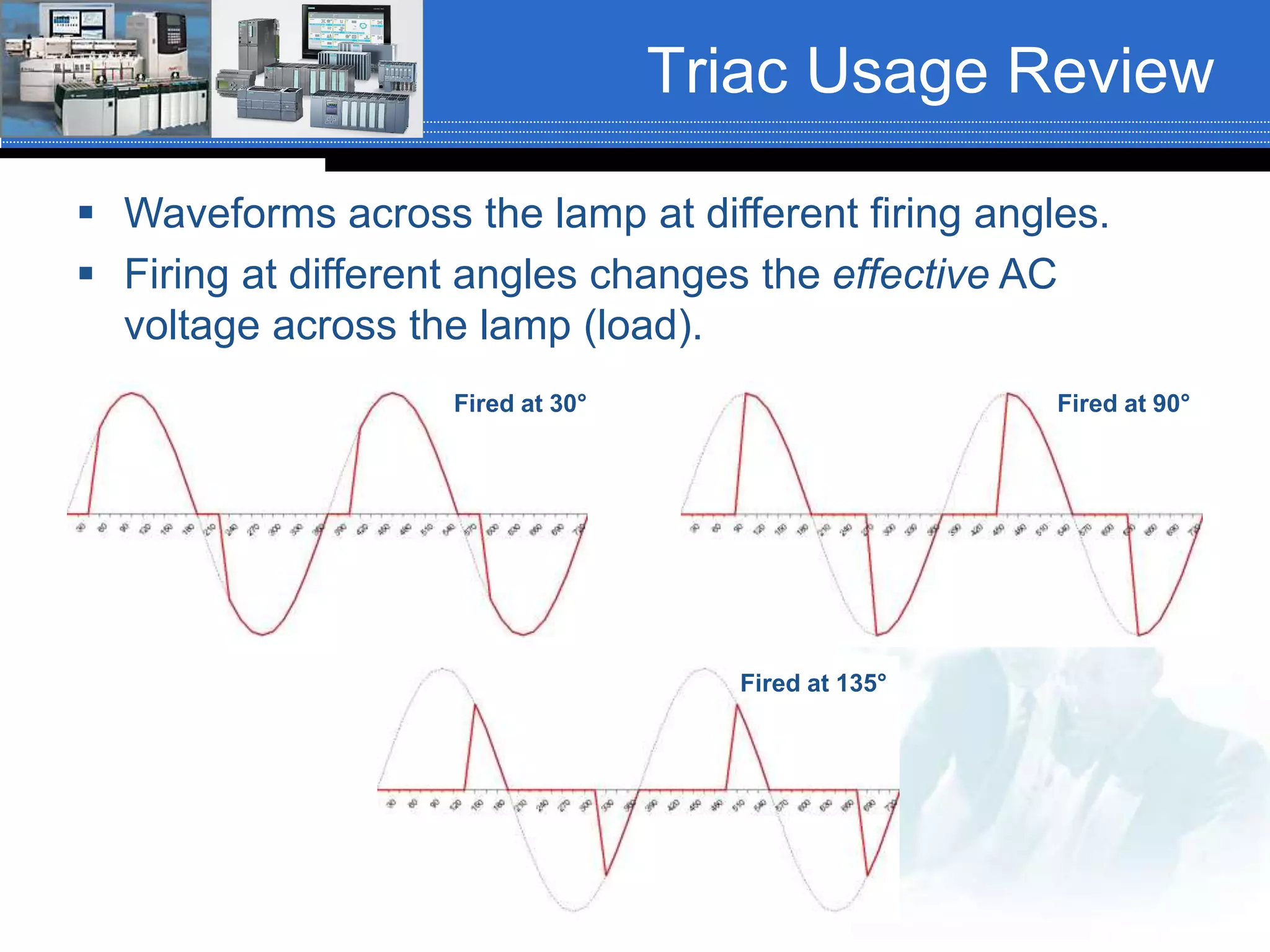

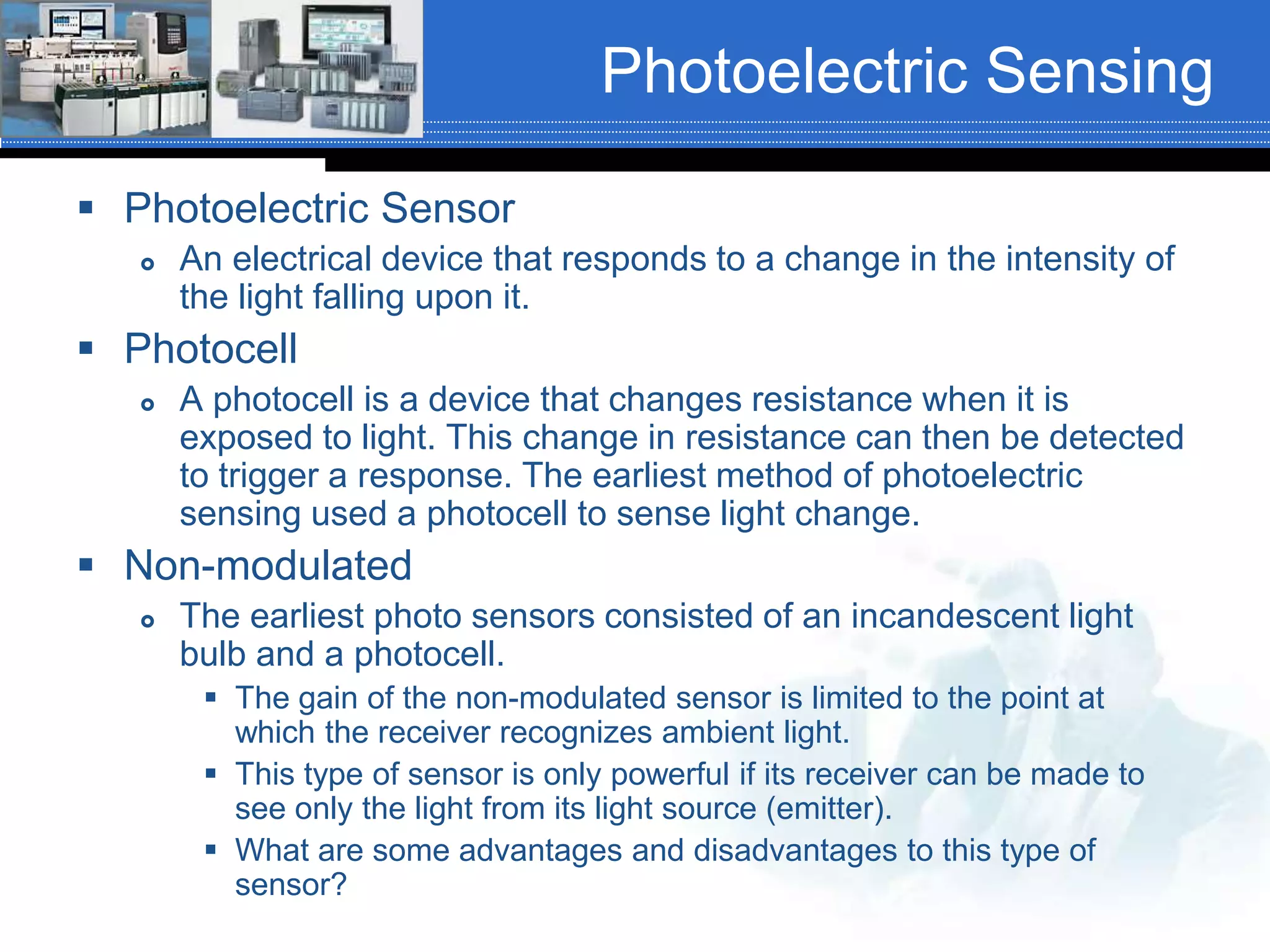



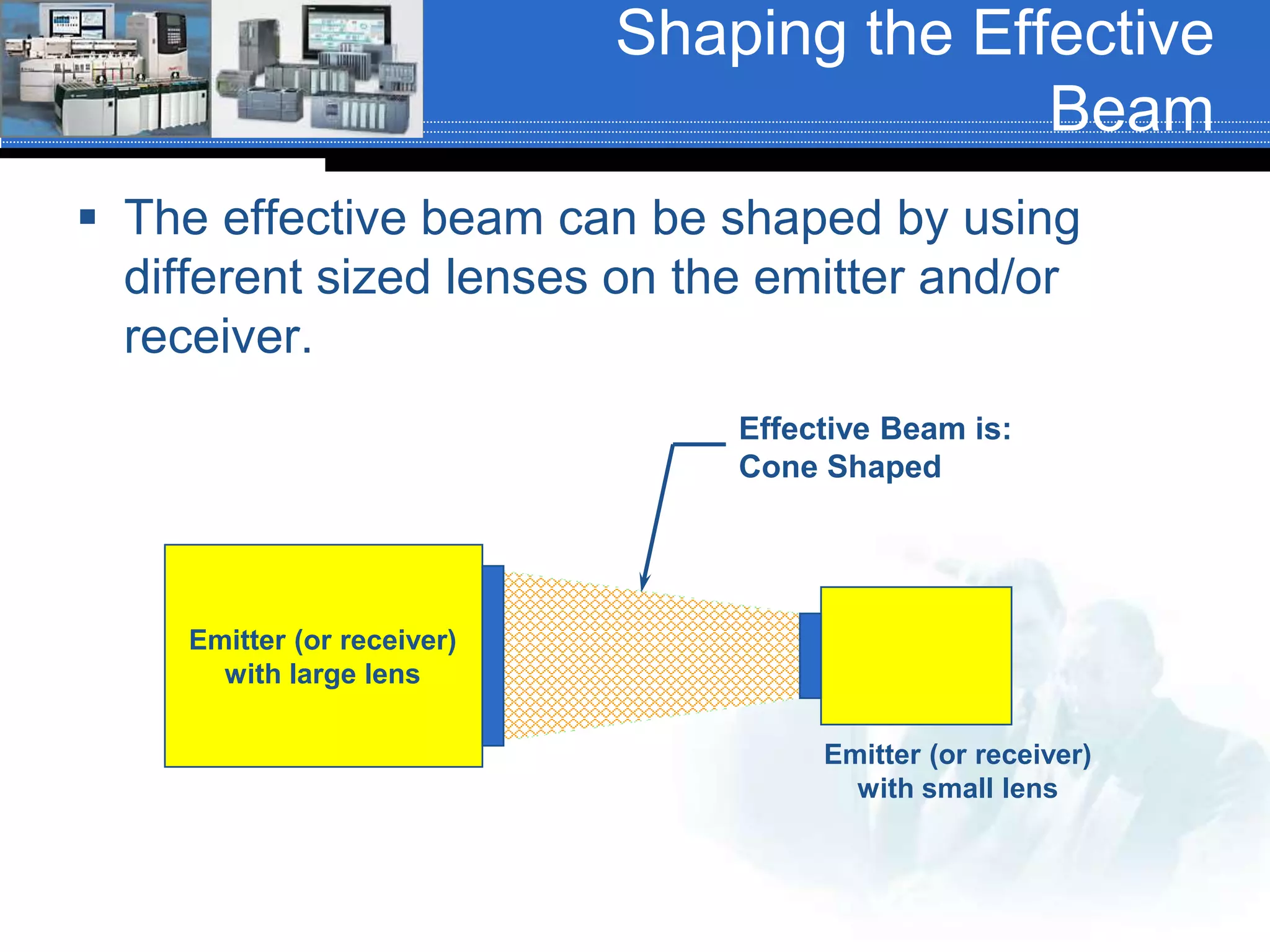

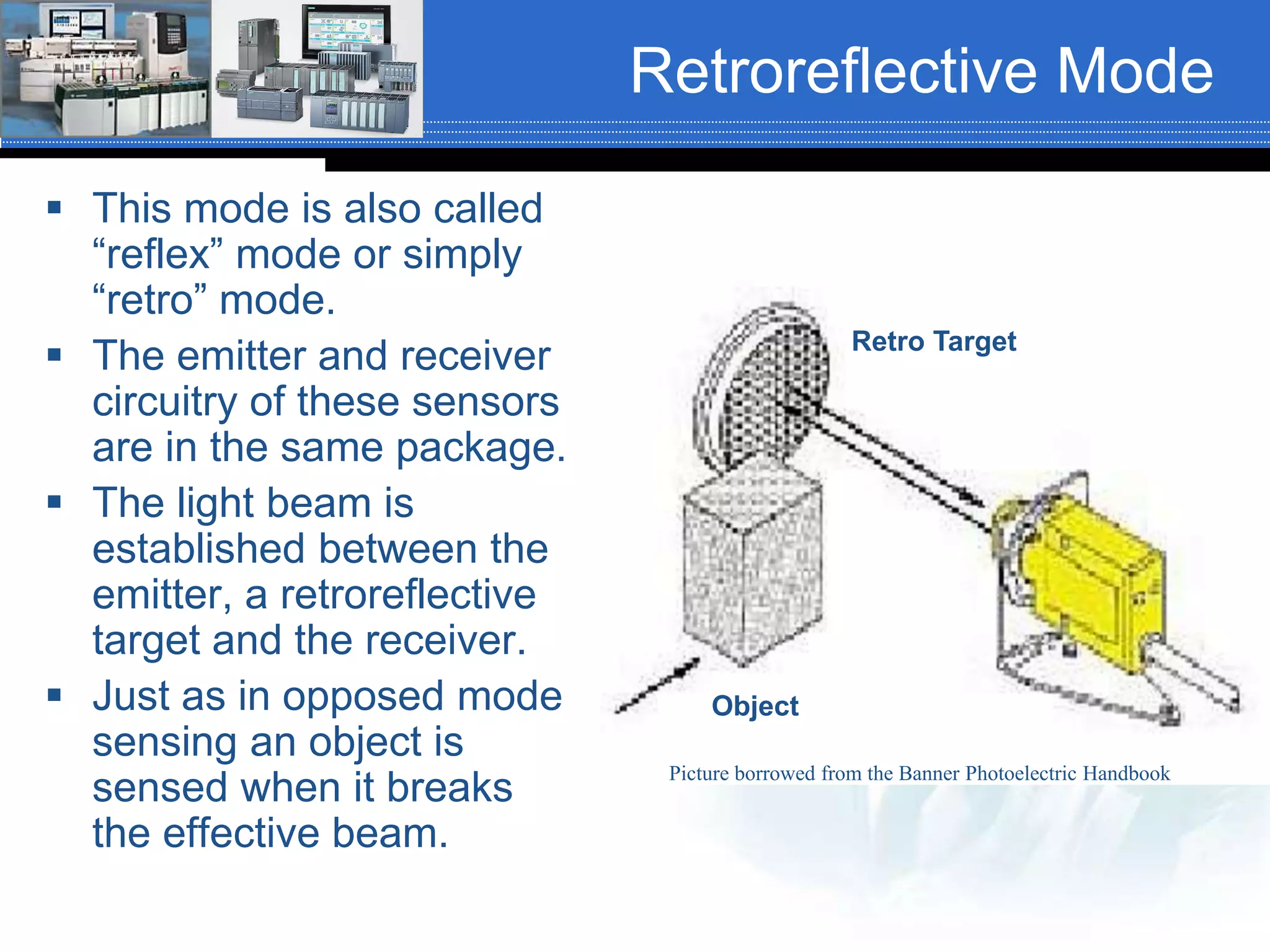
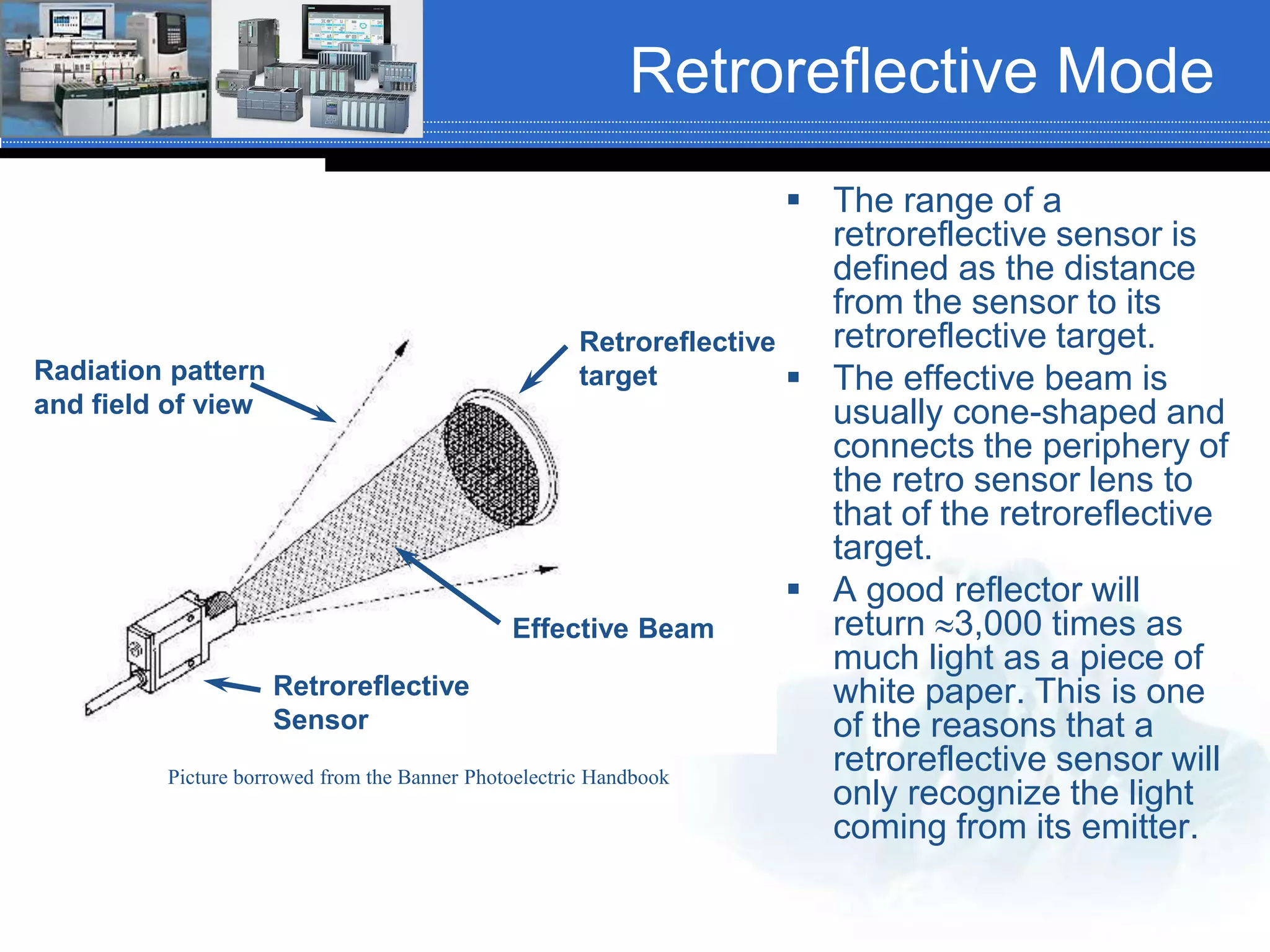
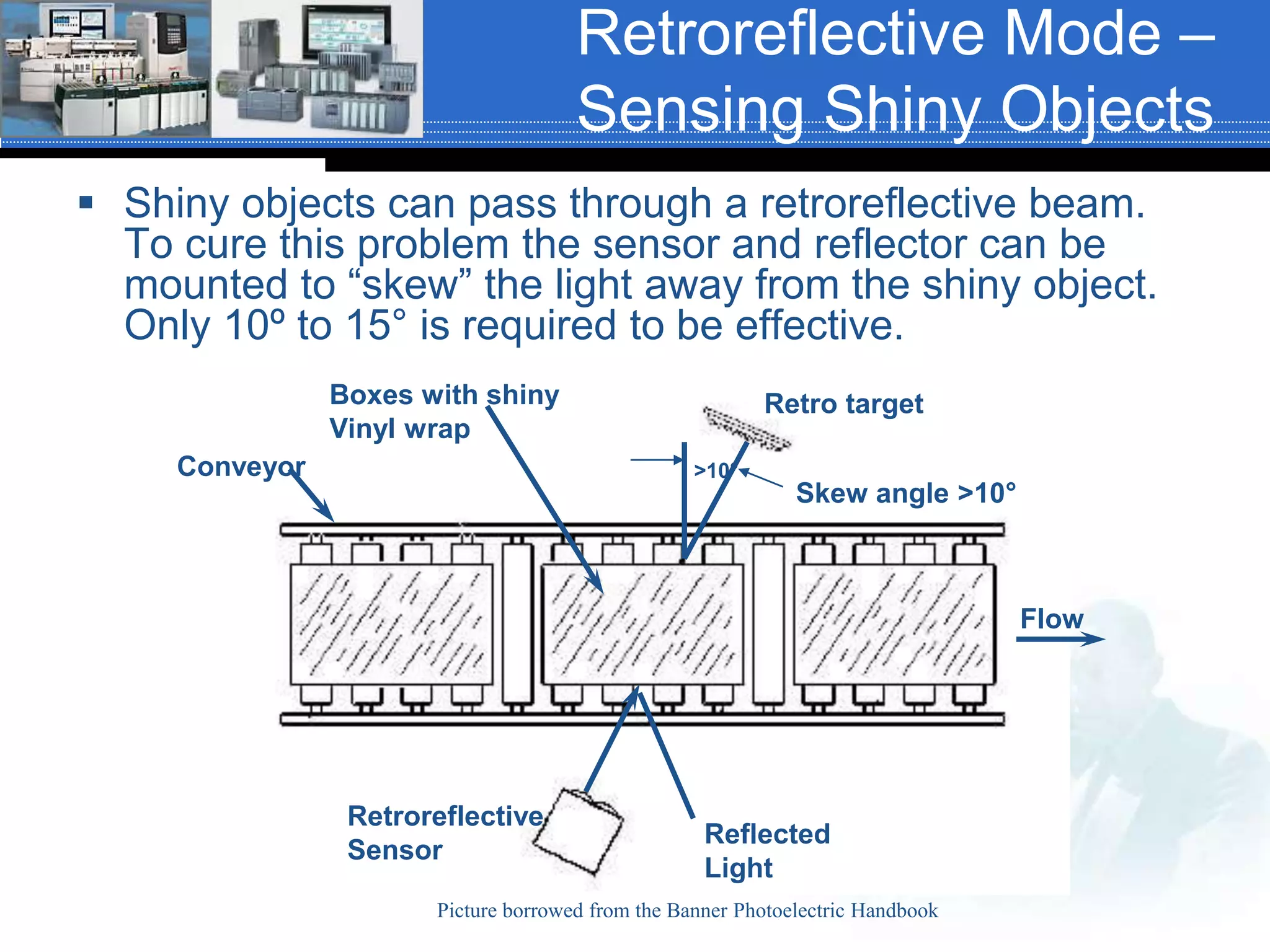
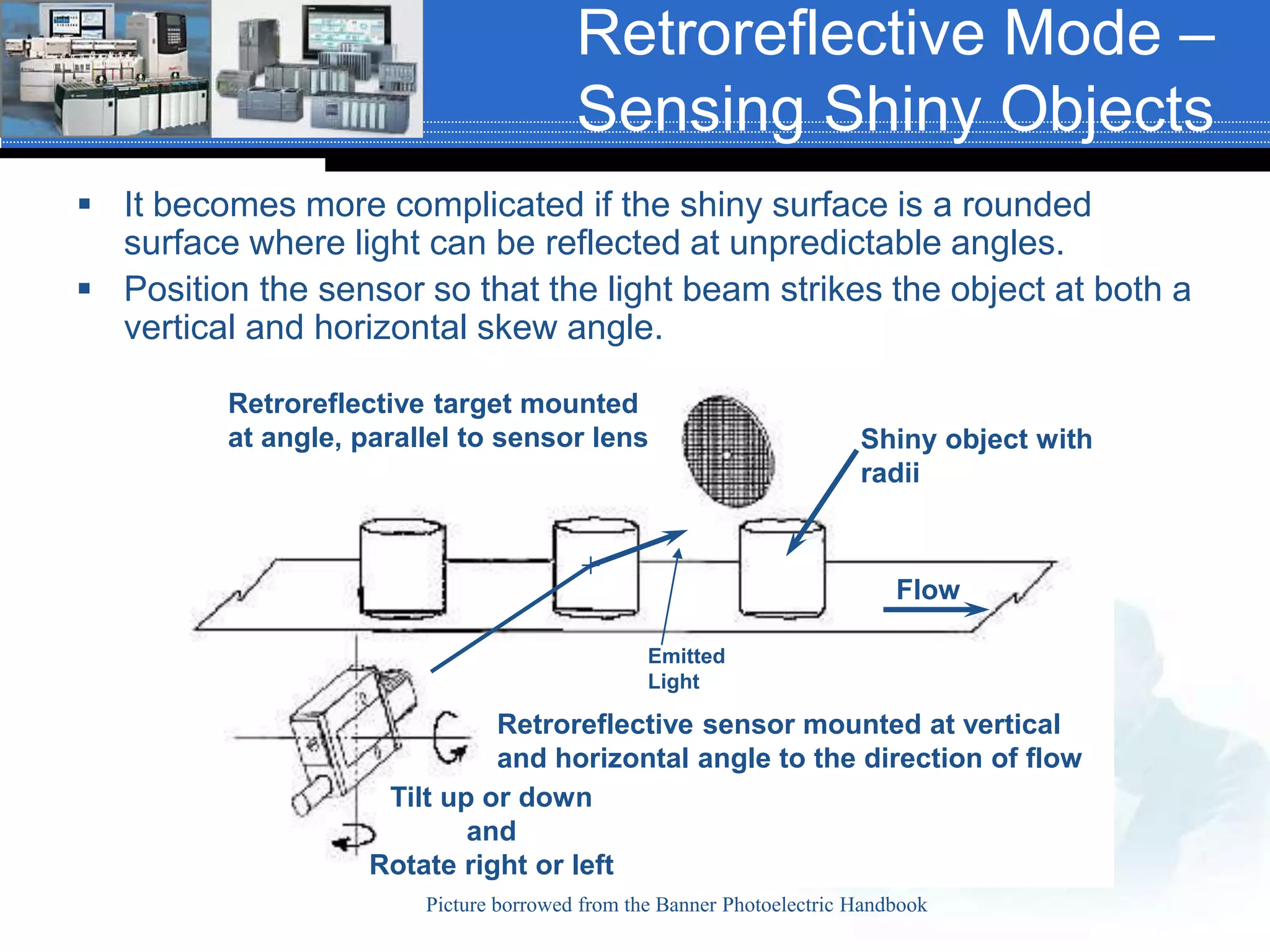
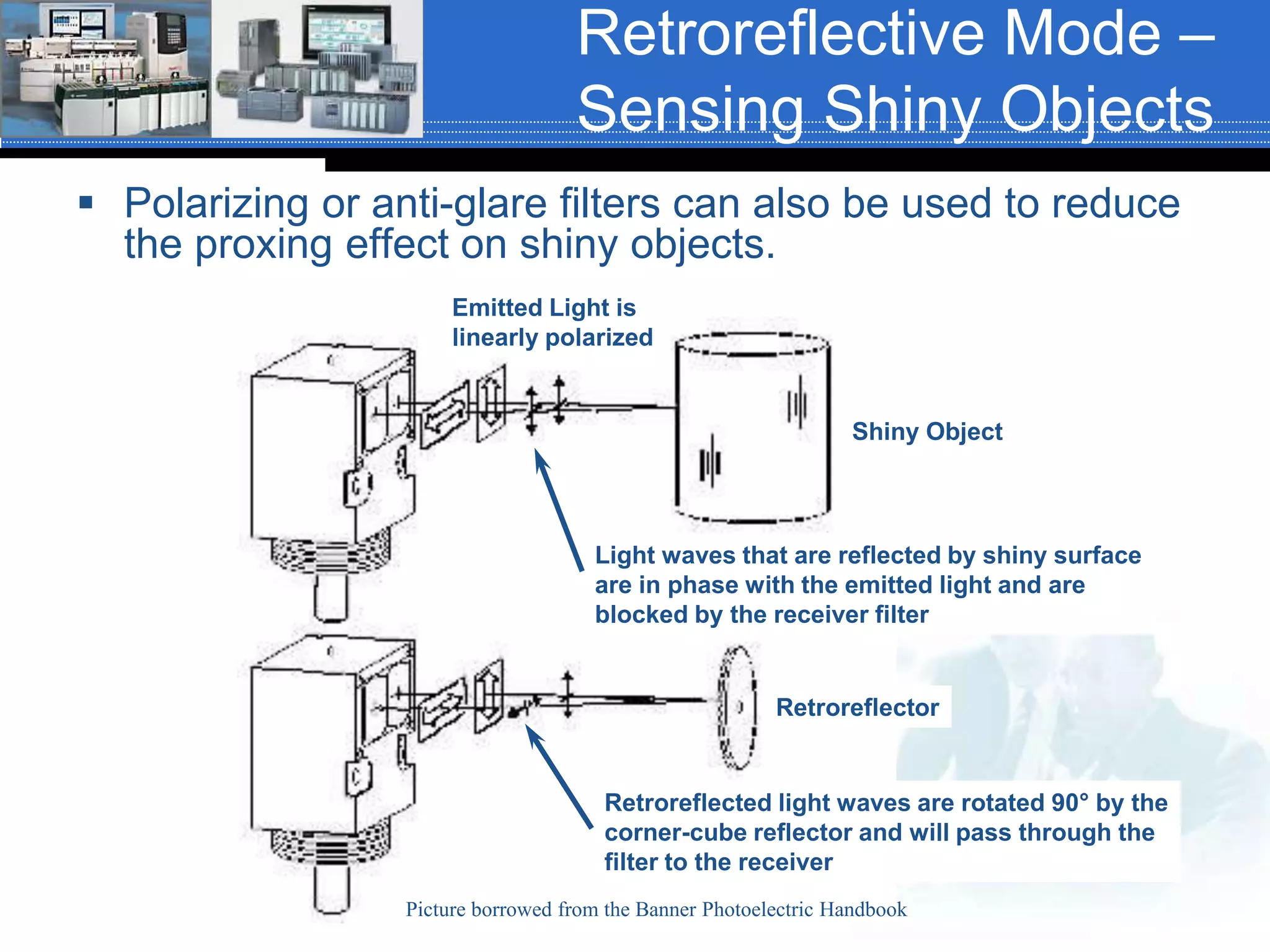

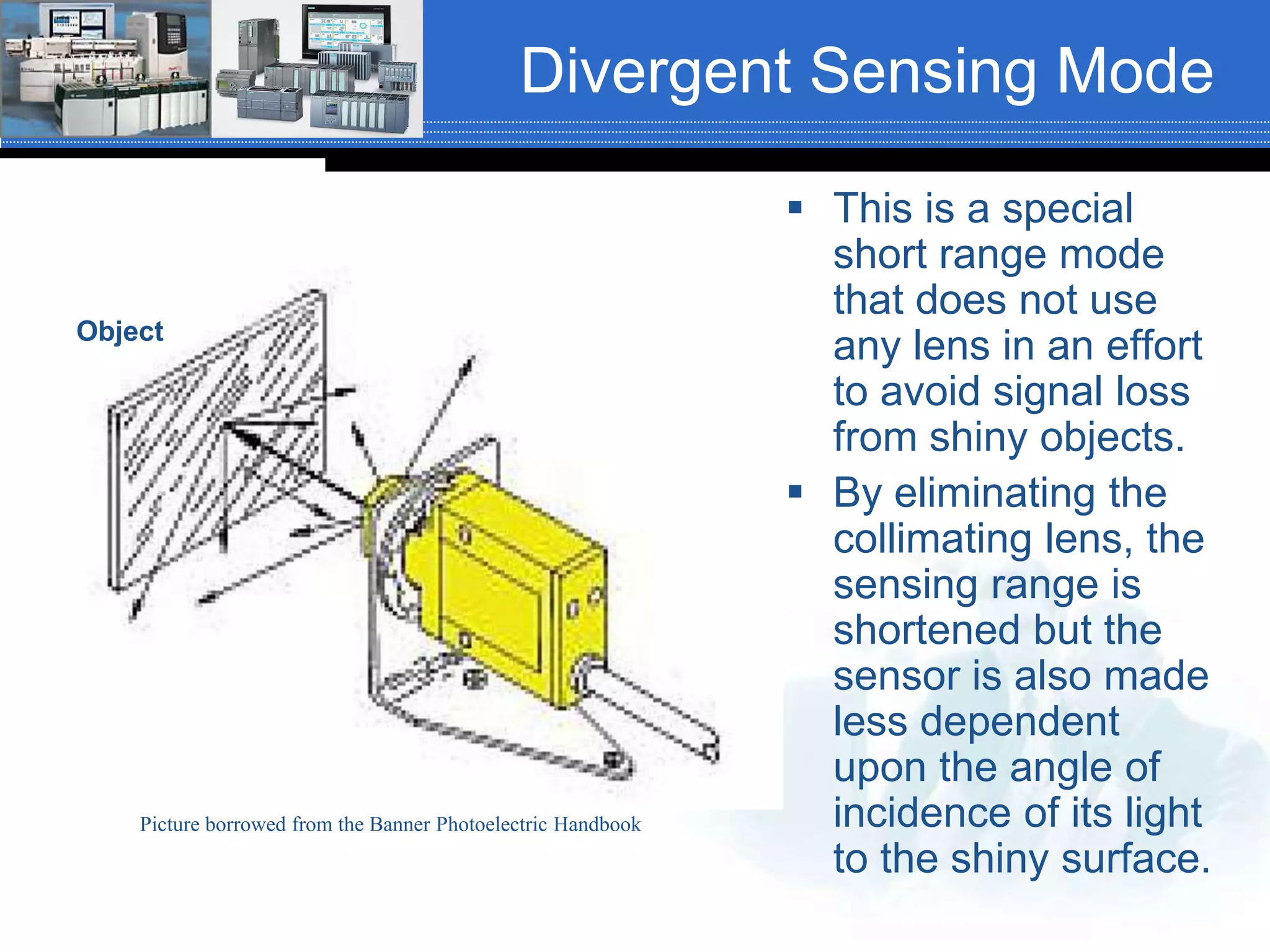





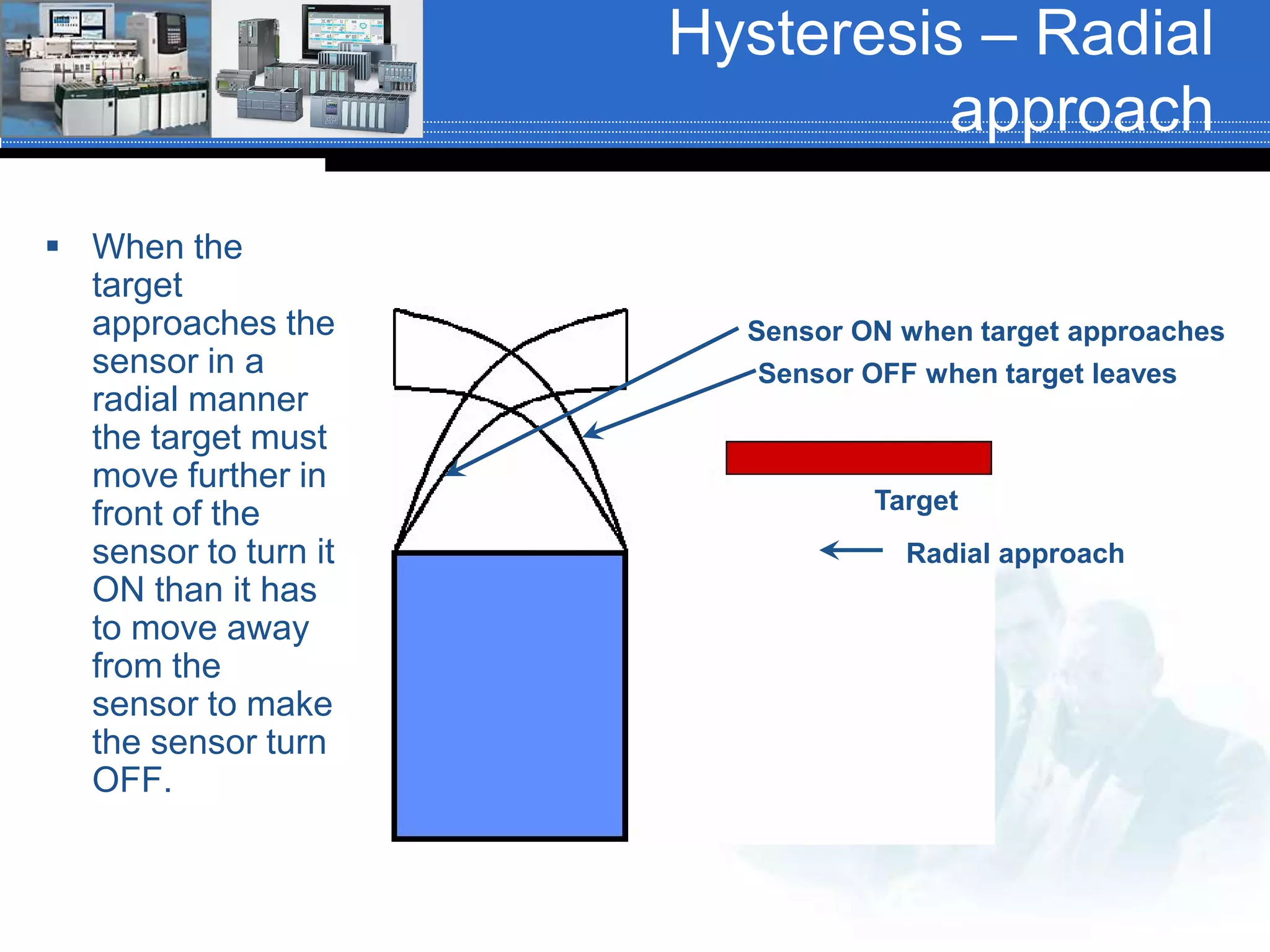








The document provides information on various types of input and output devices used in industrial control systems. It discusses binary, digital and analog I/O devices and provides examples. It also describes different types of mechanical switches, sensors, and solid state devices like diodes, transistors, SCRs and triacs. Additionally, it summarizes different photoelectric sensing techniques such as opposed, retroreflective, and proximity modes as well as concepts like effective beam, ambient light receivers and modulated light sources.

![Interfacing technique with 8085- ADC[0808]](https://cdn.slidesharecdn.com/ss_thumbnails/adc-160307140900-thumbnail.jpg?width=640&height=640&fit=bounds)