Downloaded 719 times
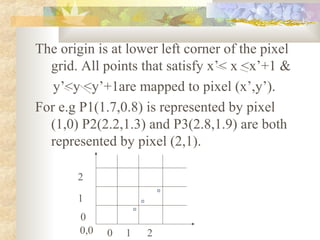
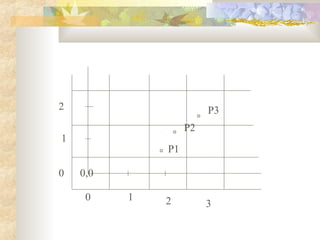

Scan conversion is the process of representing continuous graphics objects as discrete pixels. It involves converting geometric primitives like lines and circles, defined by parameters, into a set of pixels that make up the primitive in an image. This involves mapping real-valued coordinates to integer pixel coordinates. One approach is to take the floor of the x and y values, while another is to take the floor of x+0.5 and y+0.5 to center the coordinate system at the pixel grid.