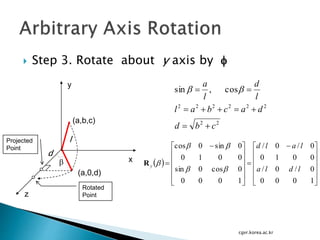
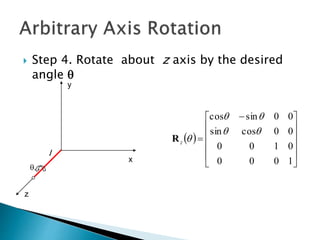
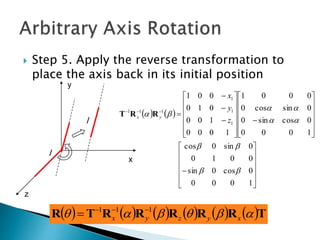
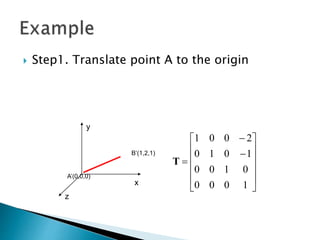
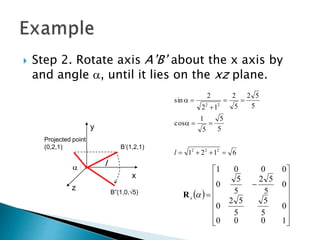
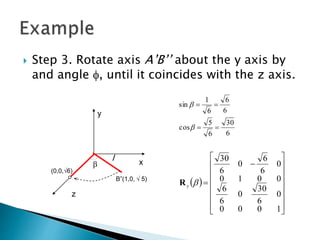
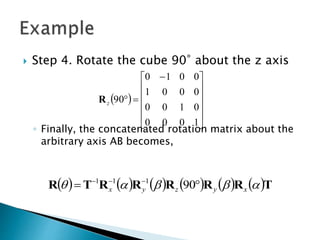
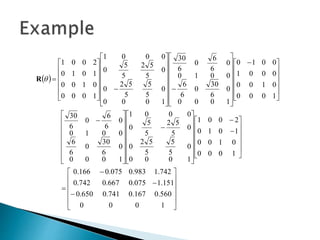
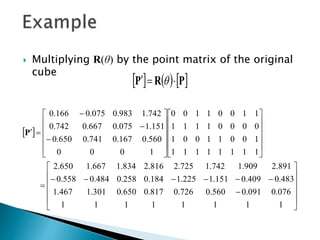
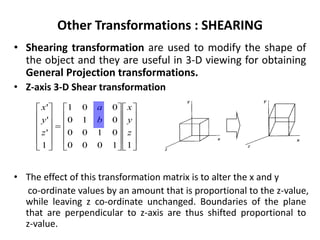
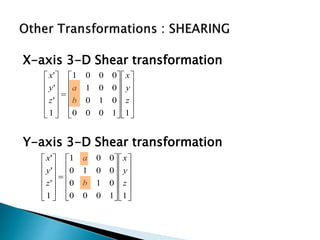
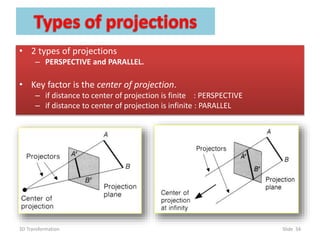
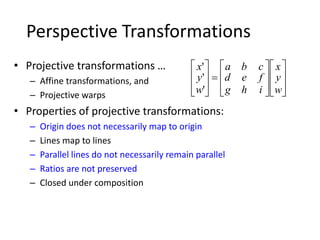
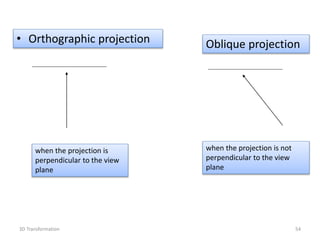
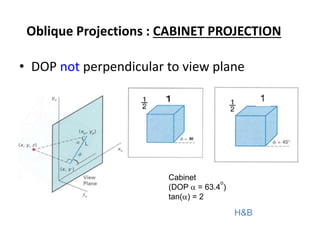
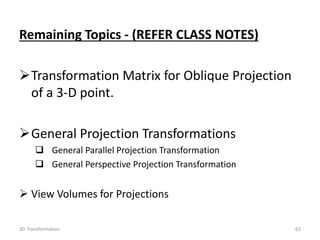
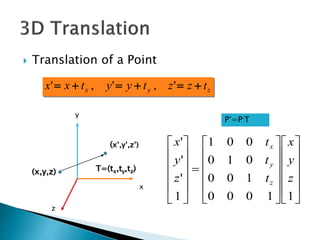
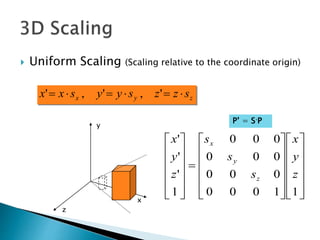
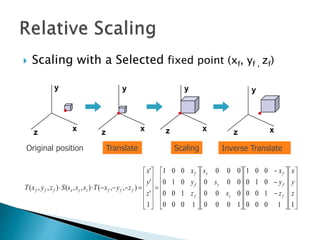
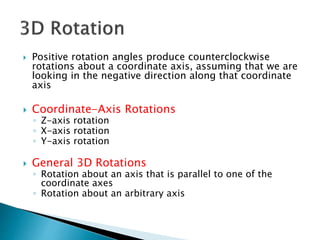
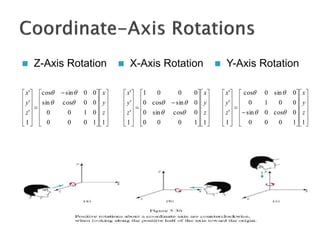
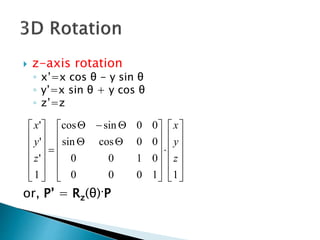
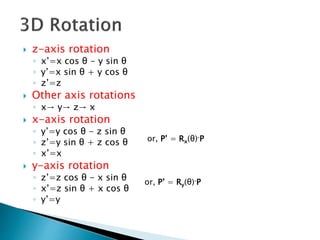
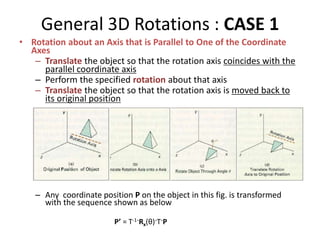
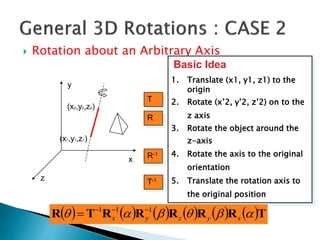
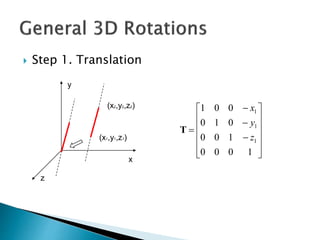
3D transformations are represented by 4x4 matrices. They include translation, scaling, and rotation. Rotation can be about coordinate axes or arbitrary axes. For arbitrary axis rotation, the process involves translating the axis to the origin, rotating the axis to align with an axis, rotating about that axis, then applying the inverse transformations to return the axis to its original orientation.
![ Step 2. Establish [ TR ]
x x axis
1000
0//0
0//0
0001
1000
0cossin0
0sincos0
0001
dcdb
dbdc
x
R
(a,b,c)
(0,b,c)
Projected
Point
Rotated
Point
d
c
cb
c
d
b
cb
b
22
22
cos
sin
x
y
z](https://image.slidesharecdn.com/threedimensional-transformations-160215174236/85/Three-dimensional-transformations-13-320.jpg)