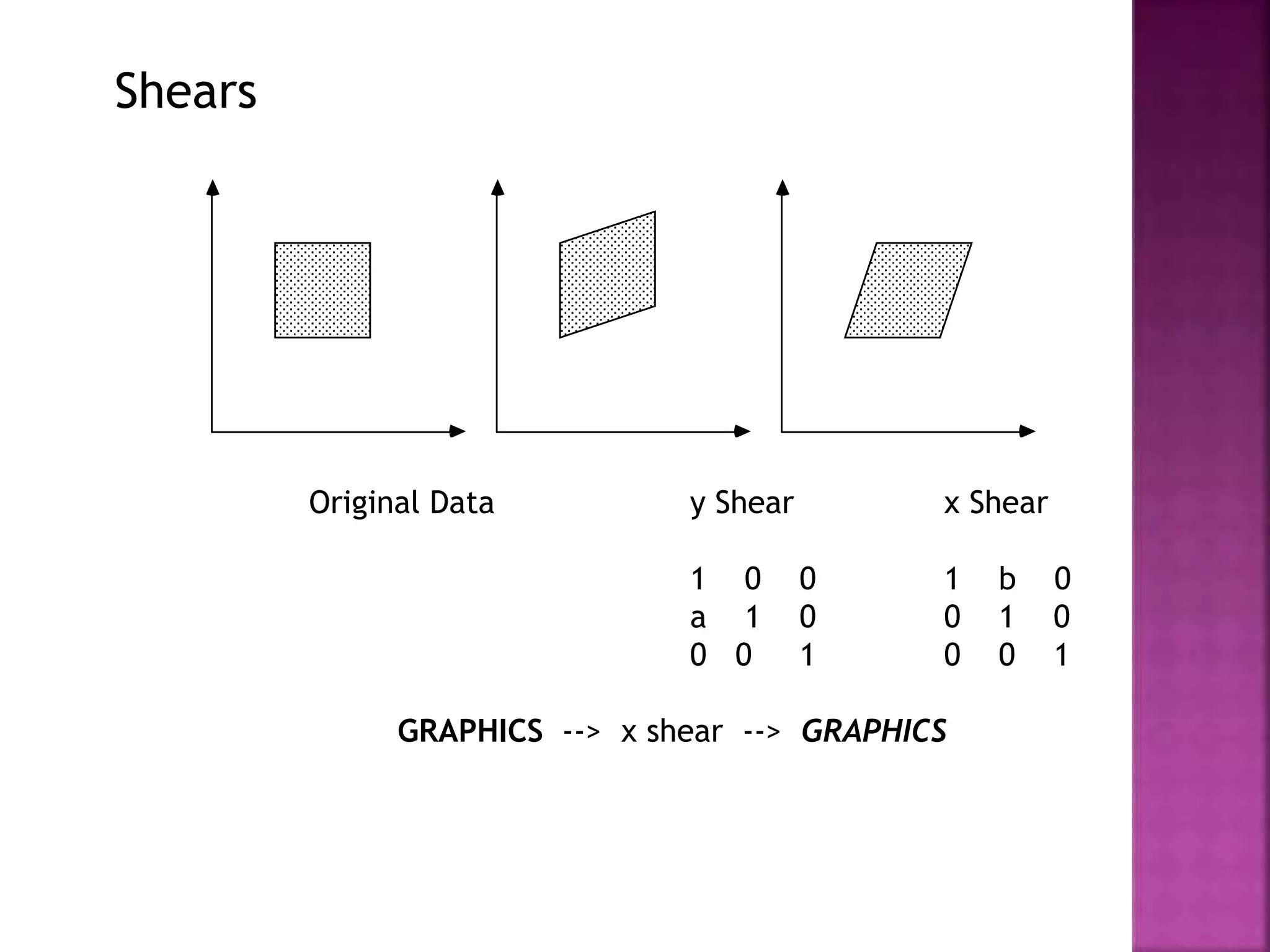
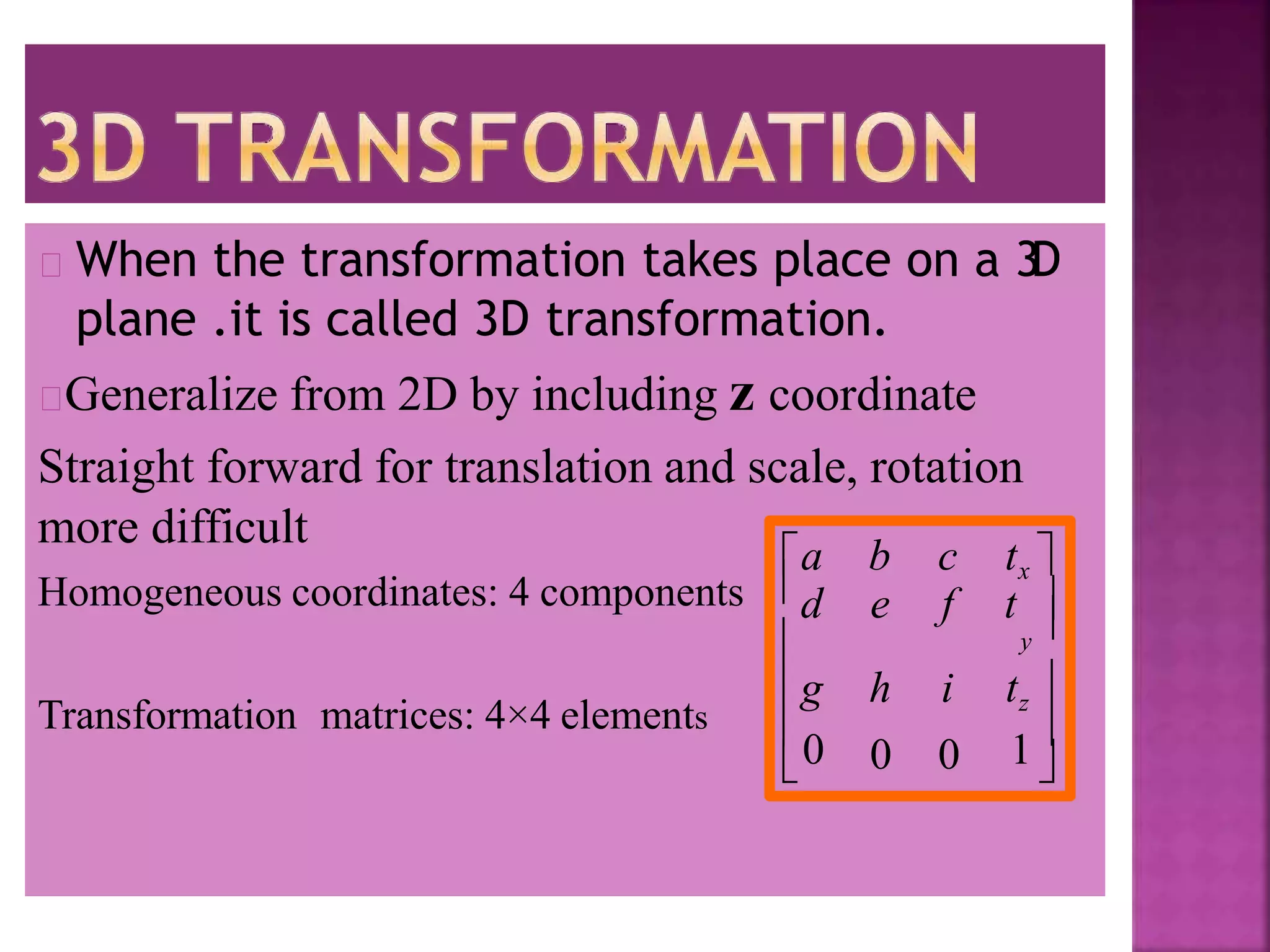
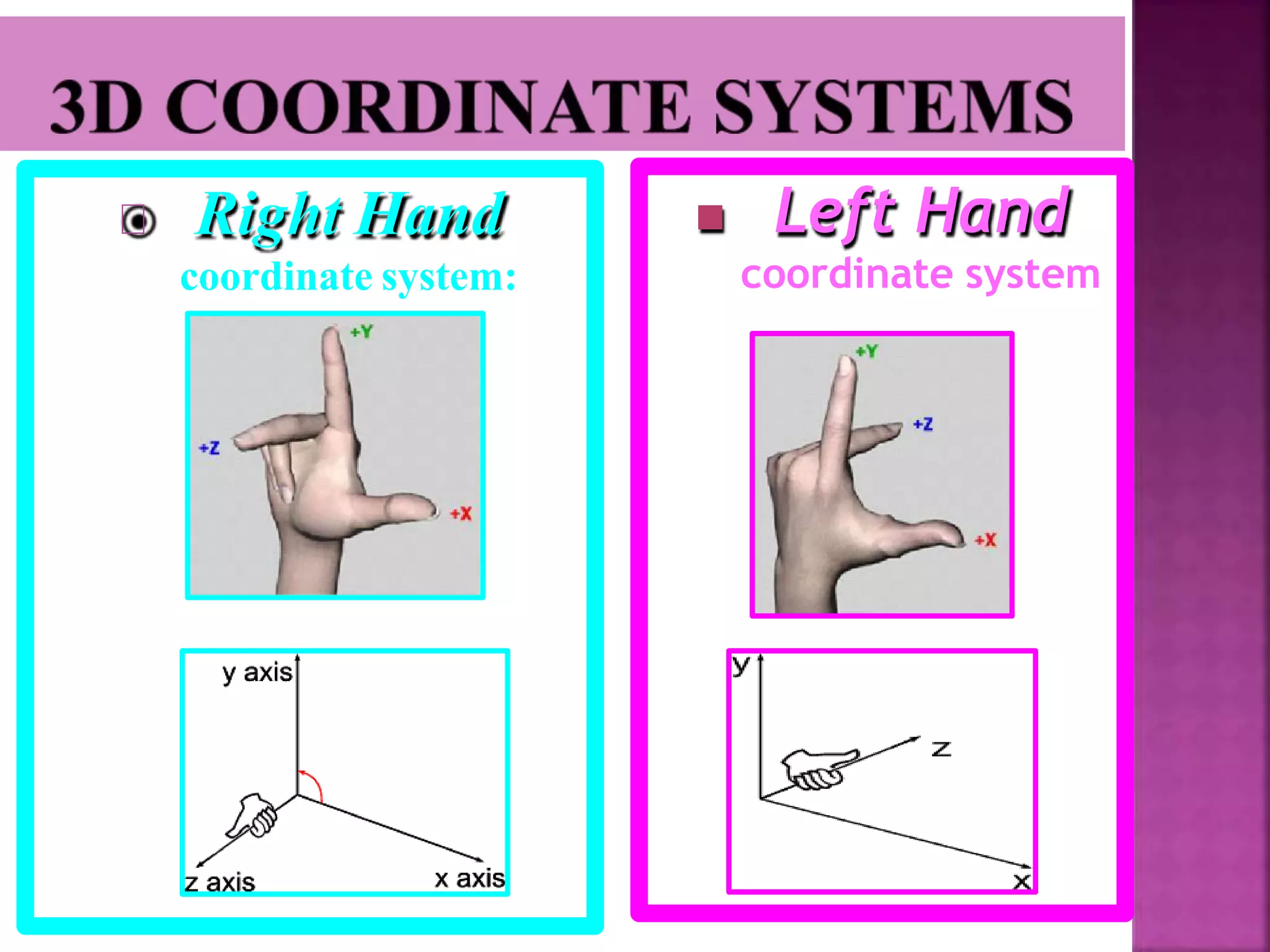
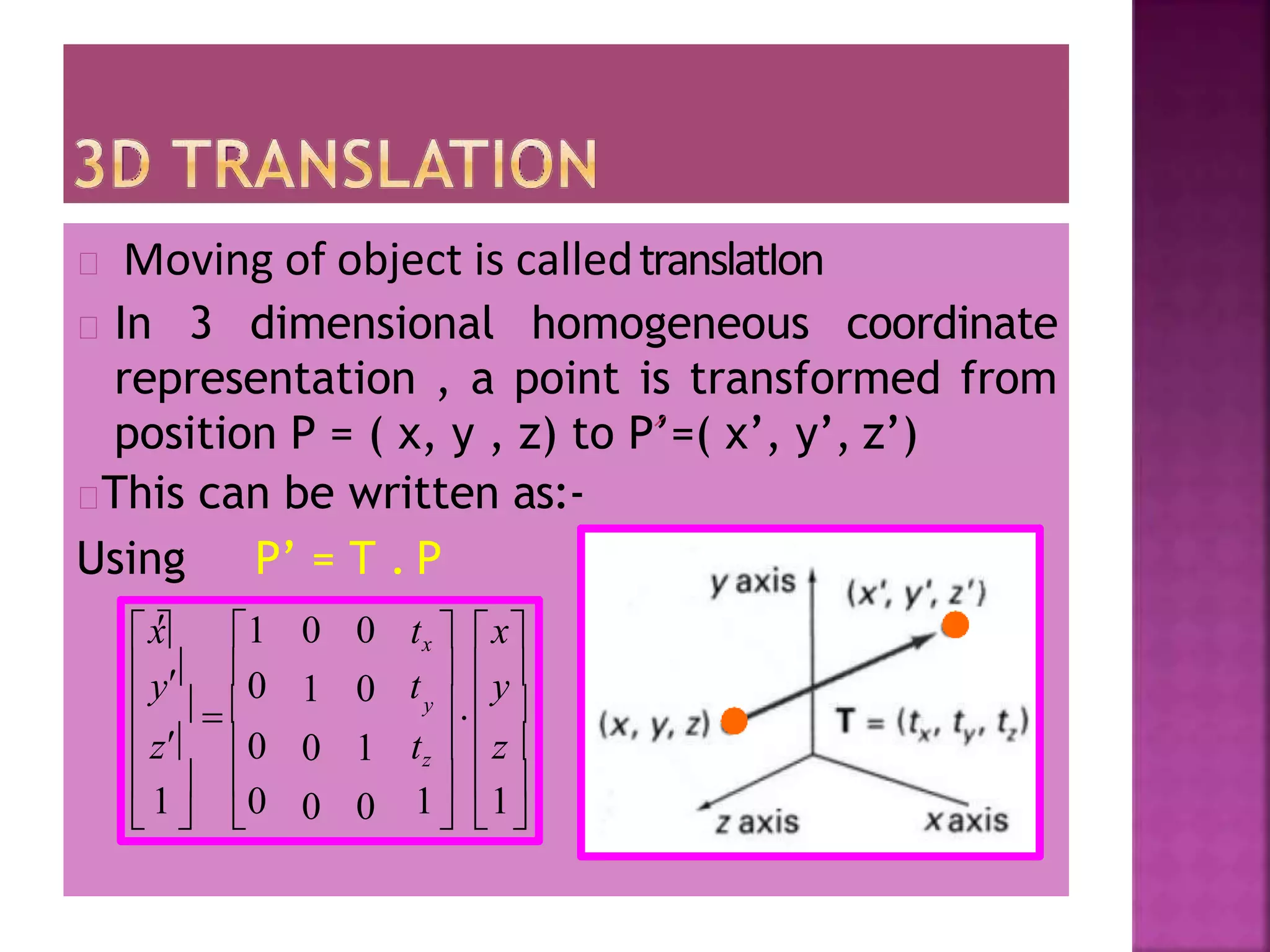
This document discusses different types of 2D and 3D geometric transformations in computer graphics, including translation, rotation, scaling, shearing, and reflection. It provides examples of how to mathematically represent these transformations using matrix multiplication and homogeneous coordinates. Transformations are used to position and modify 3D objects, change viewing positions, and affect how something is viewed.