Downloaded 59 times

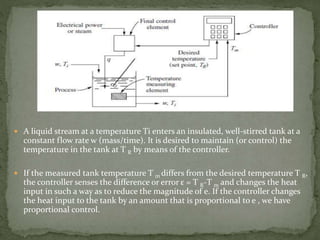













The document discusses control systems, particularly focusing on industrial applications that manage and regulate equipment, highlighting open and closed-loop systems. It explains how temperature control in a well-stirred tank is achieved through feedback mechanisms and proportional control, illustrating error correction in varying load conditions. Key components of these systems, such as measuring elements and controllers, are described, alongside the distinction between servomechanism and regulator problems.










































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)

















