Download as PDF, PPTX

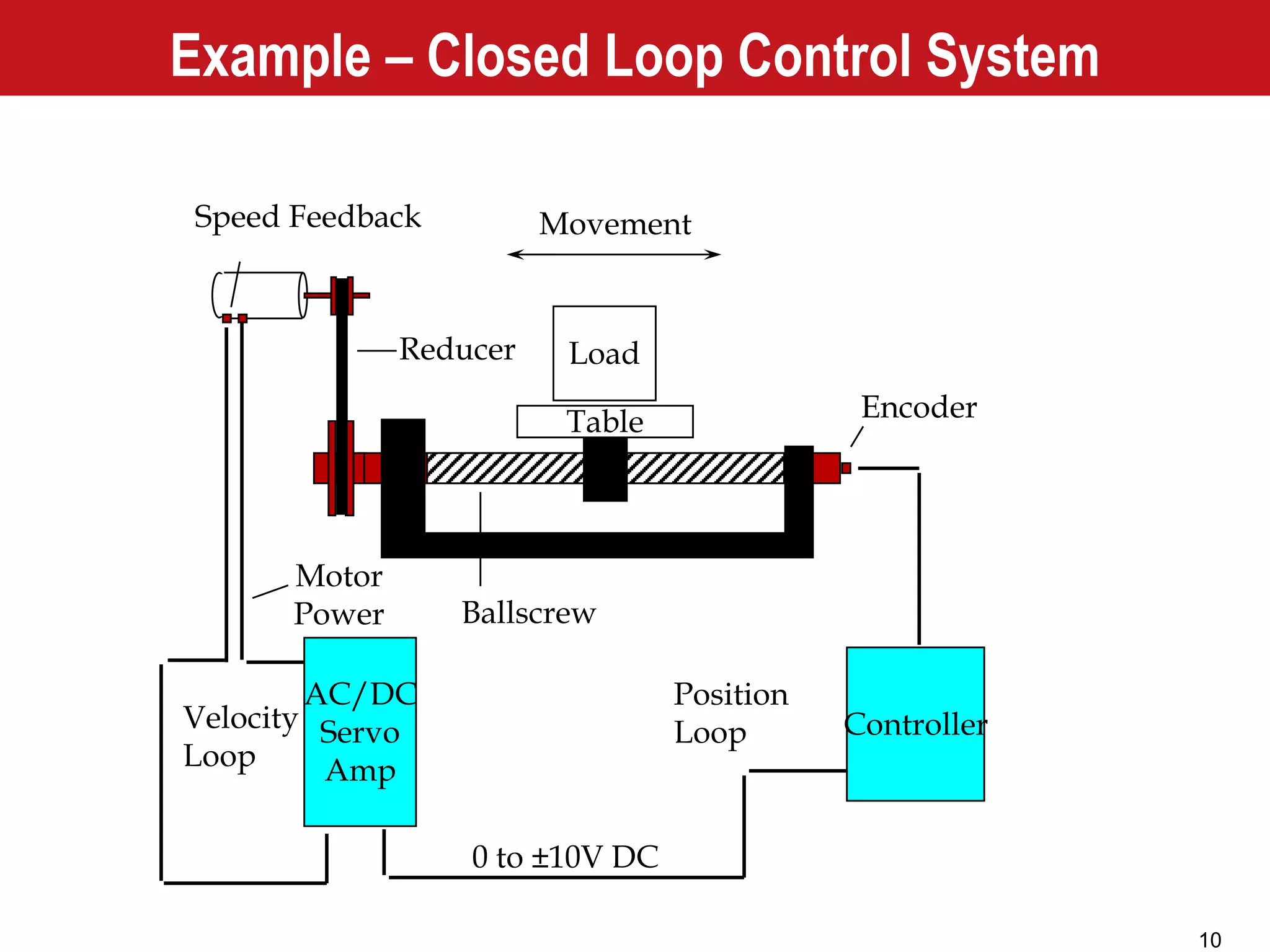
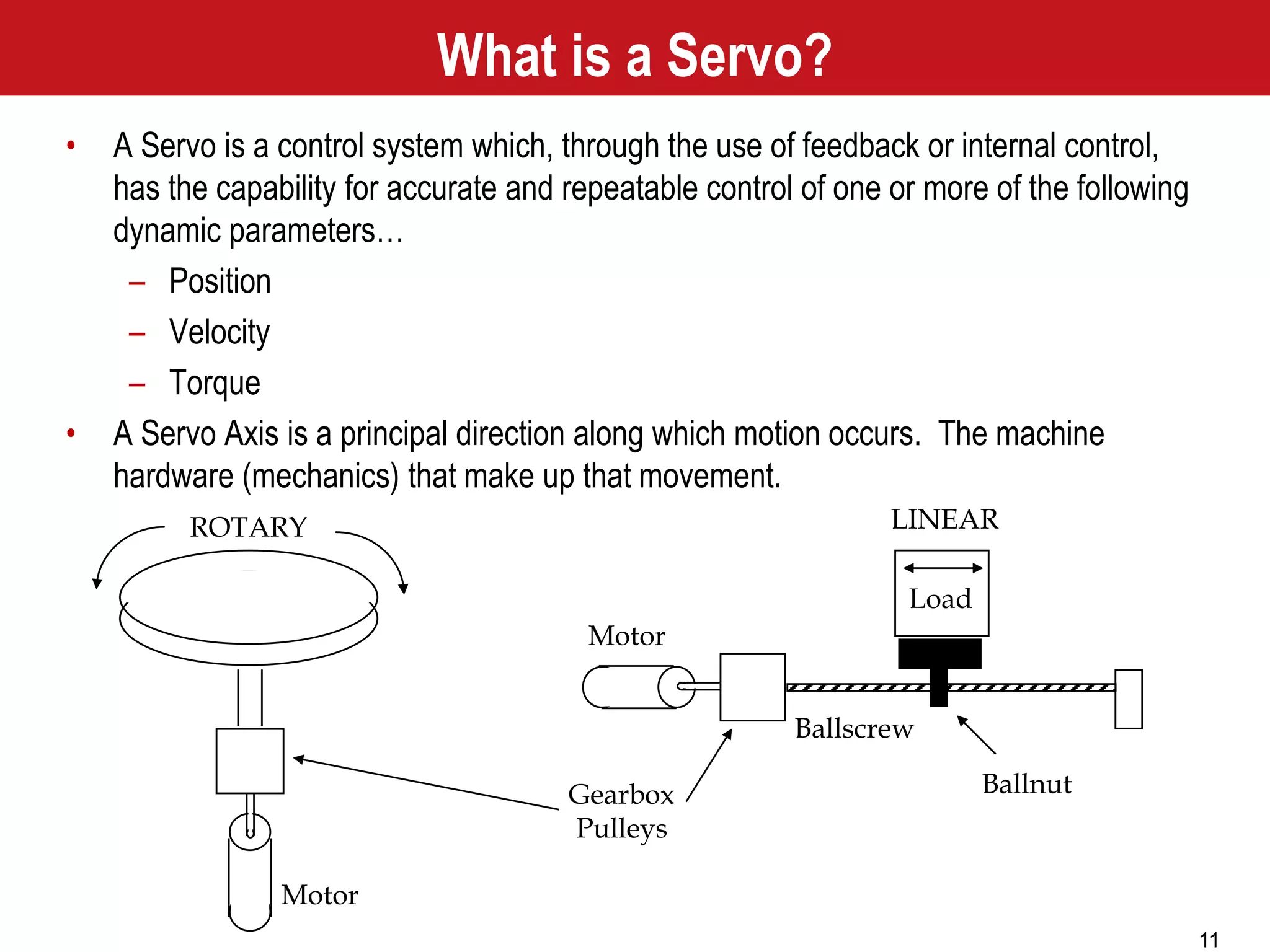
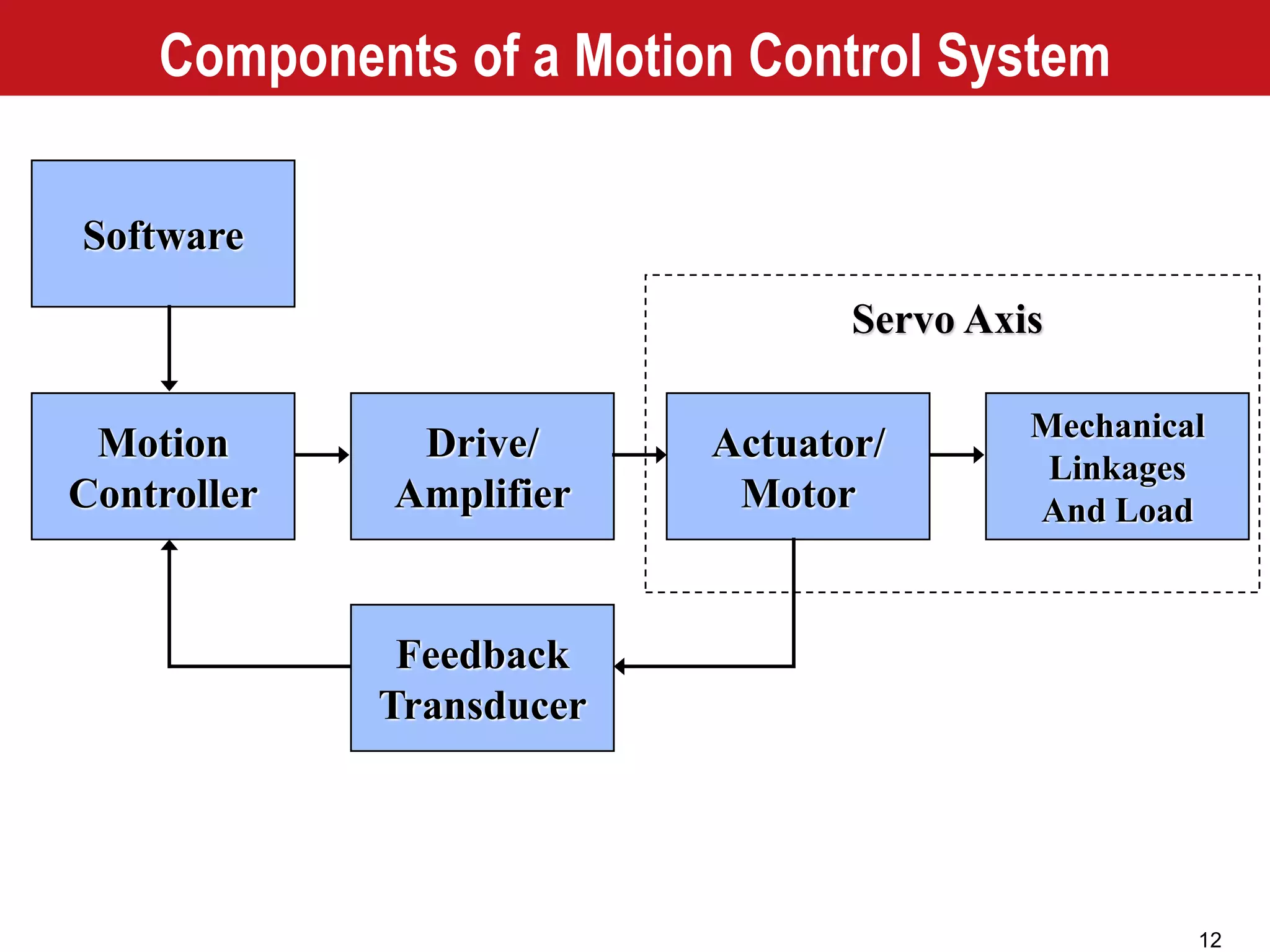
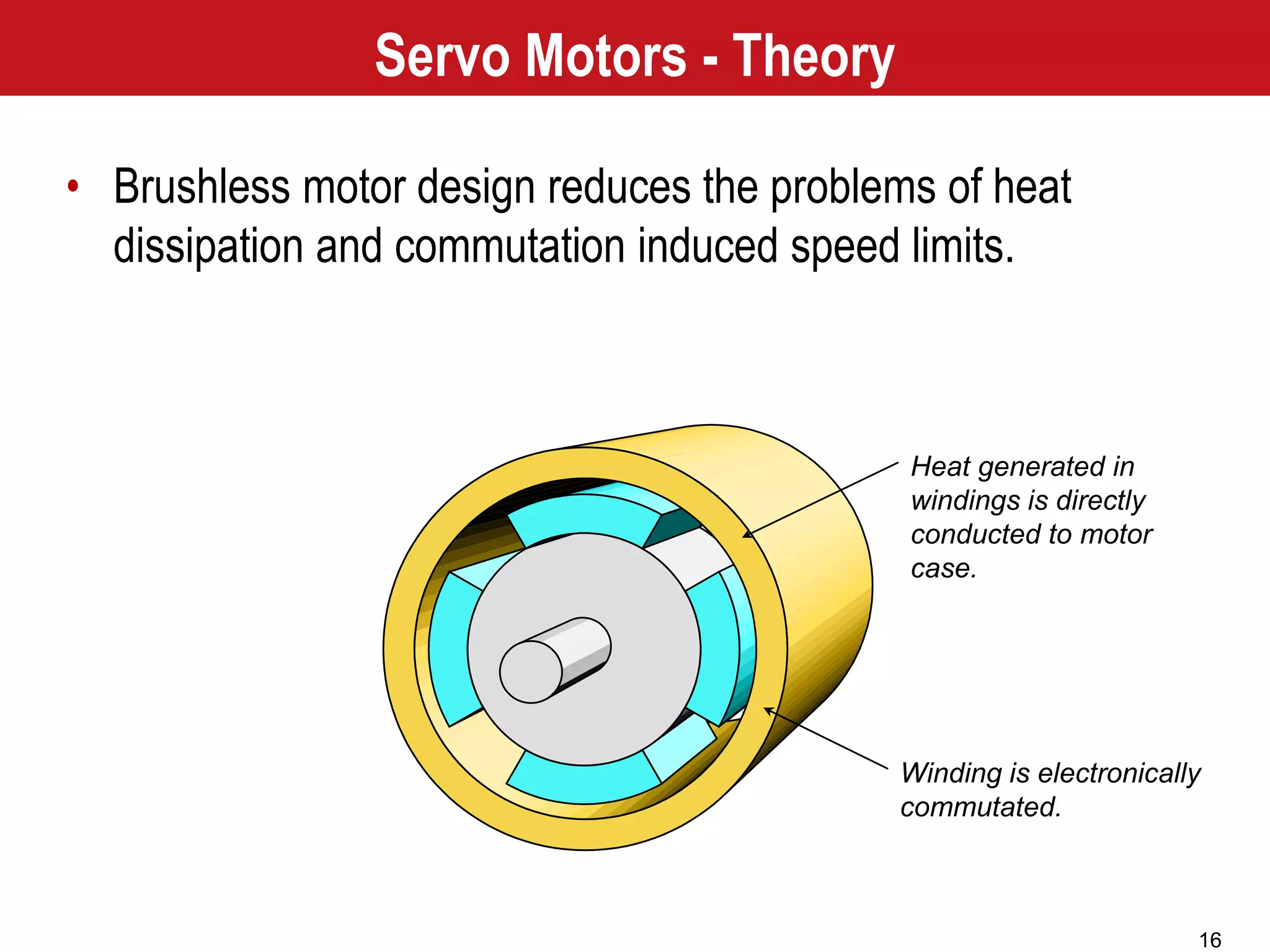
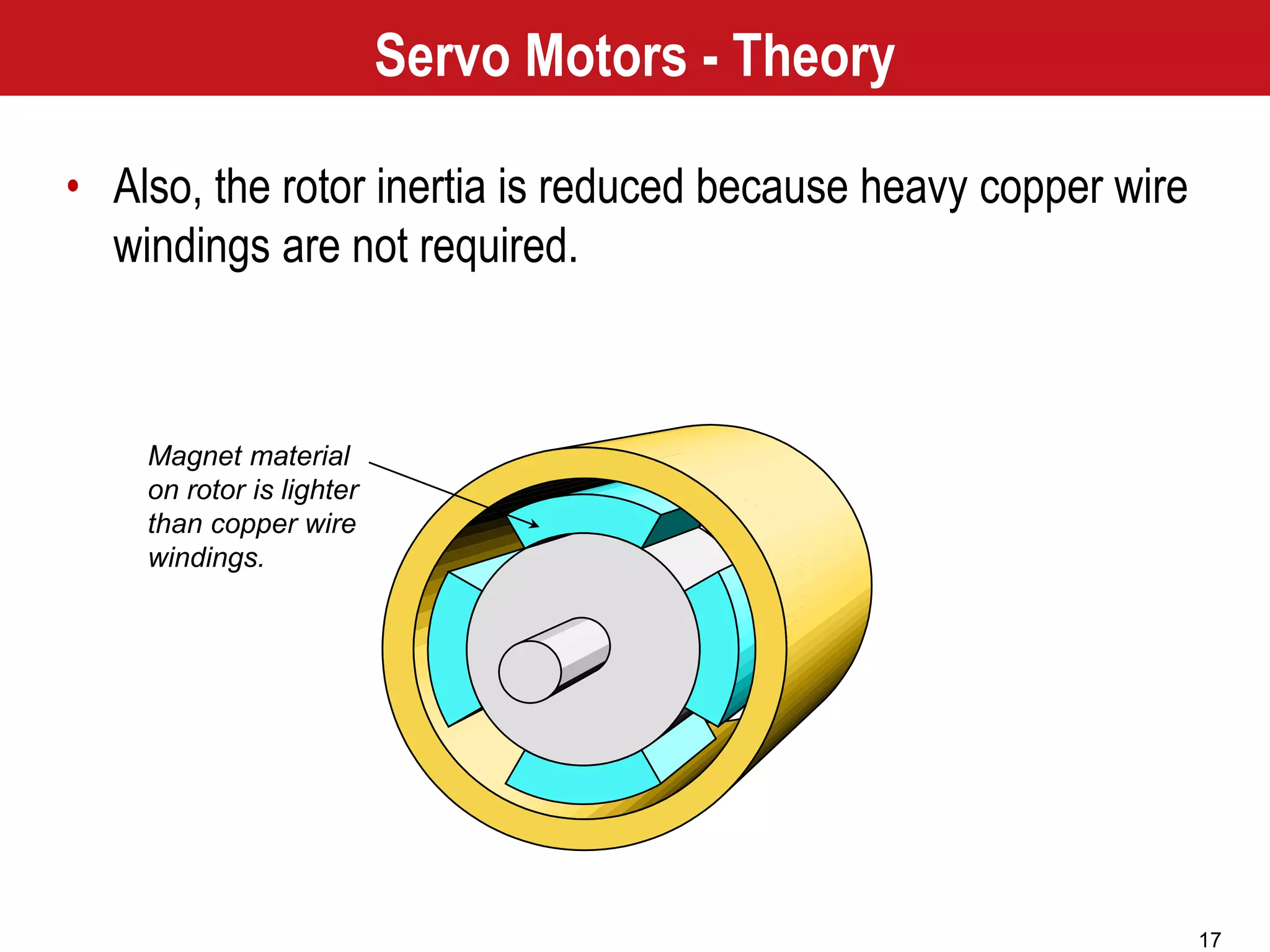
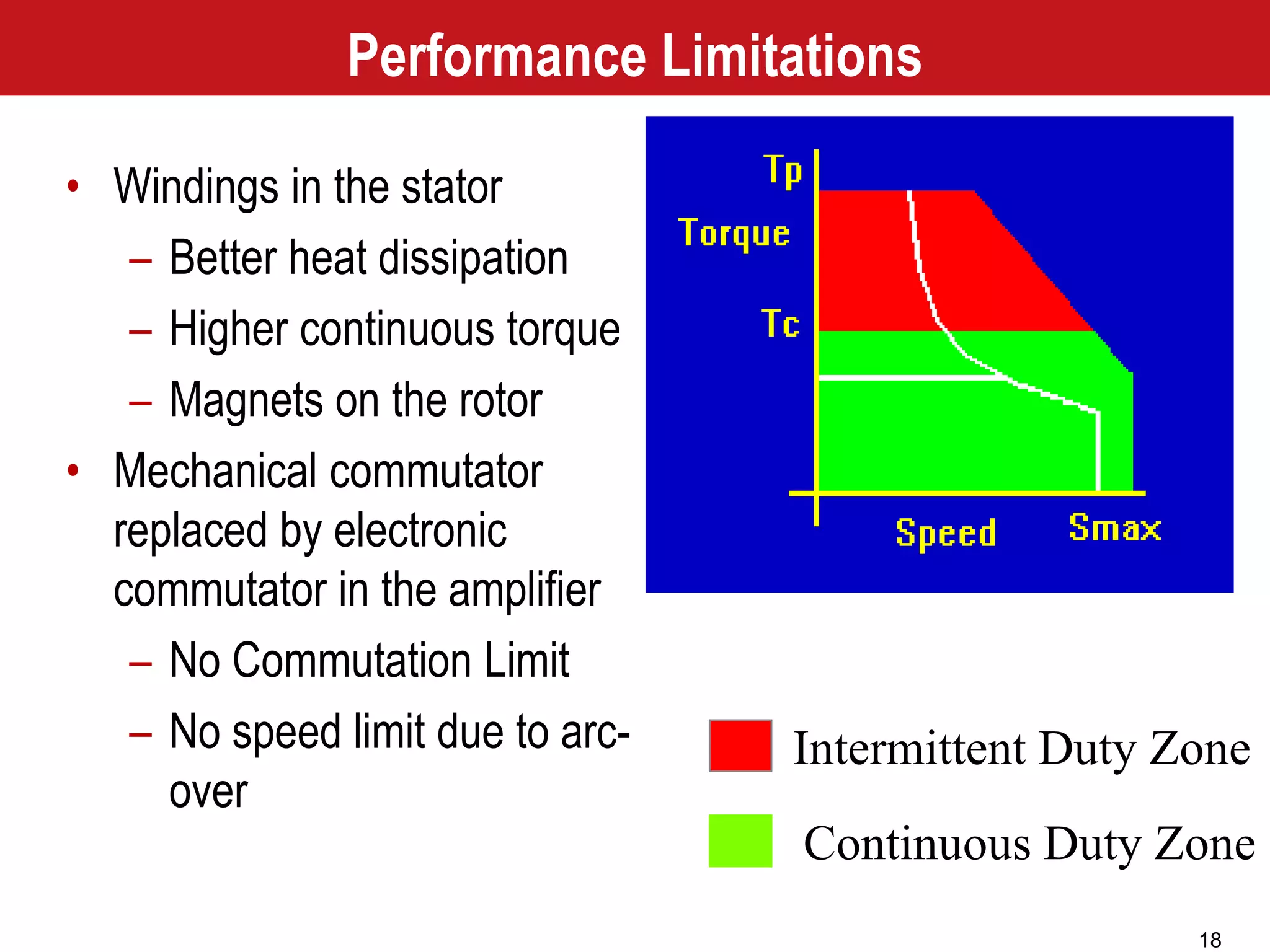
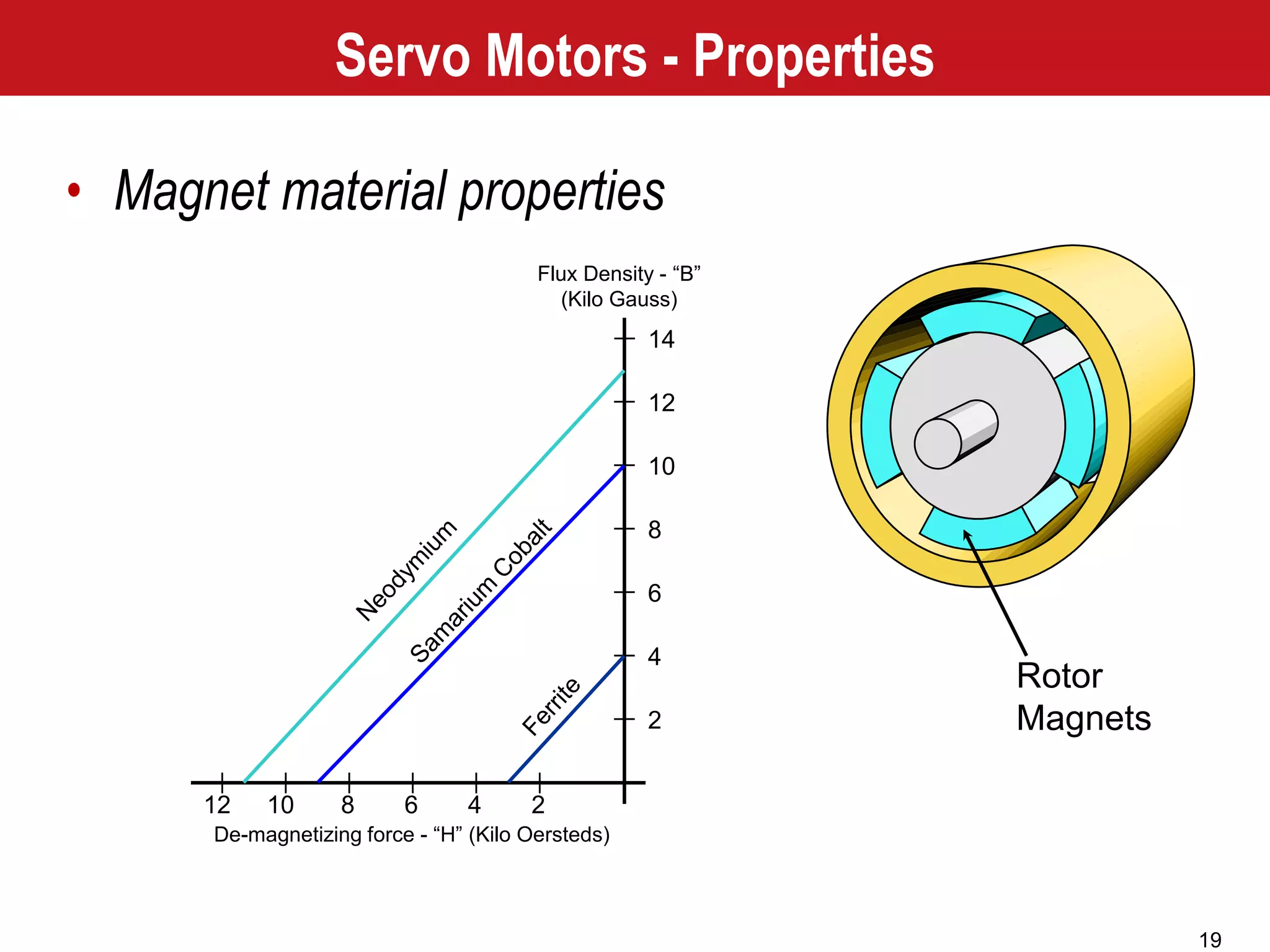
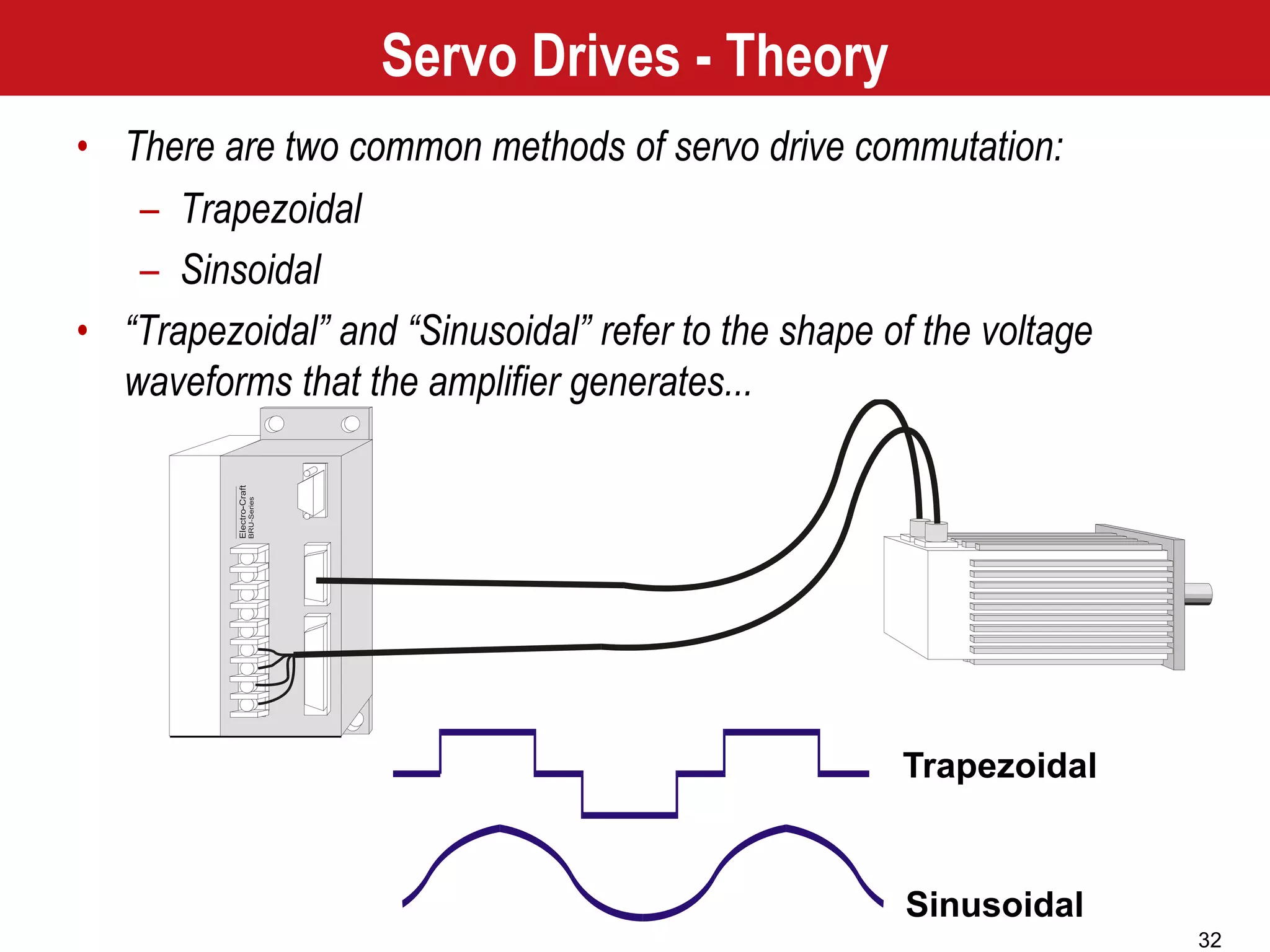
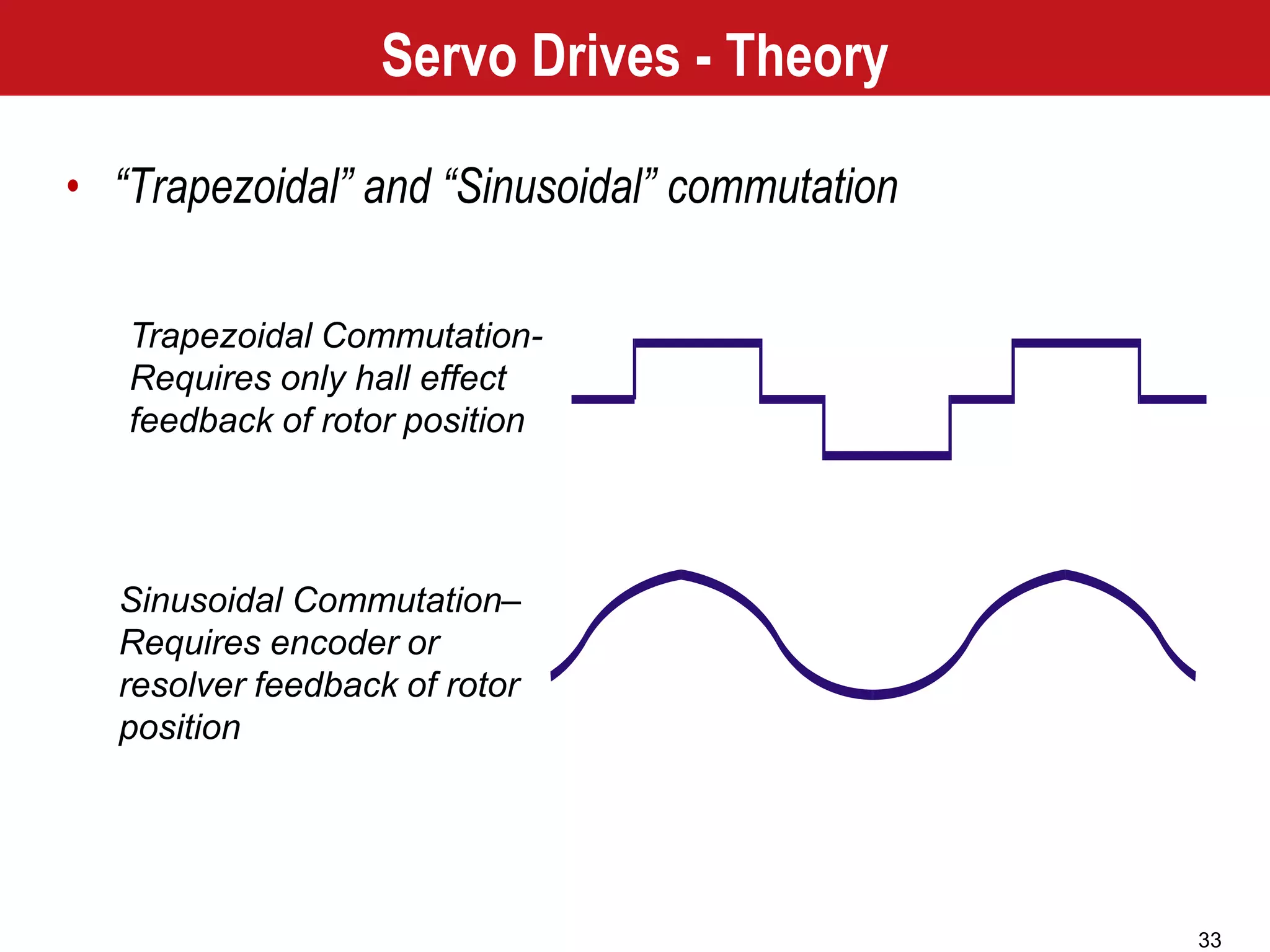
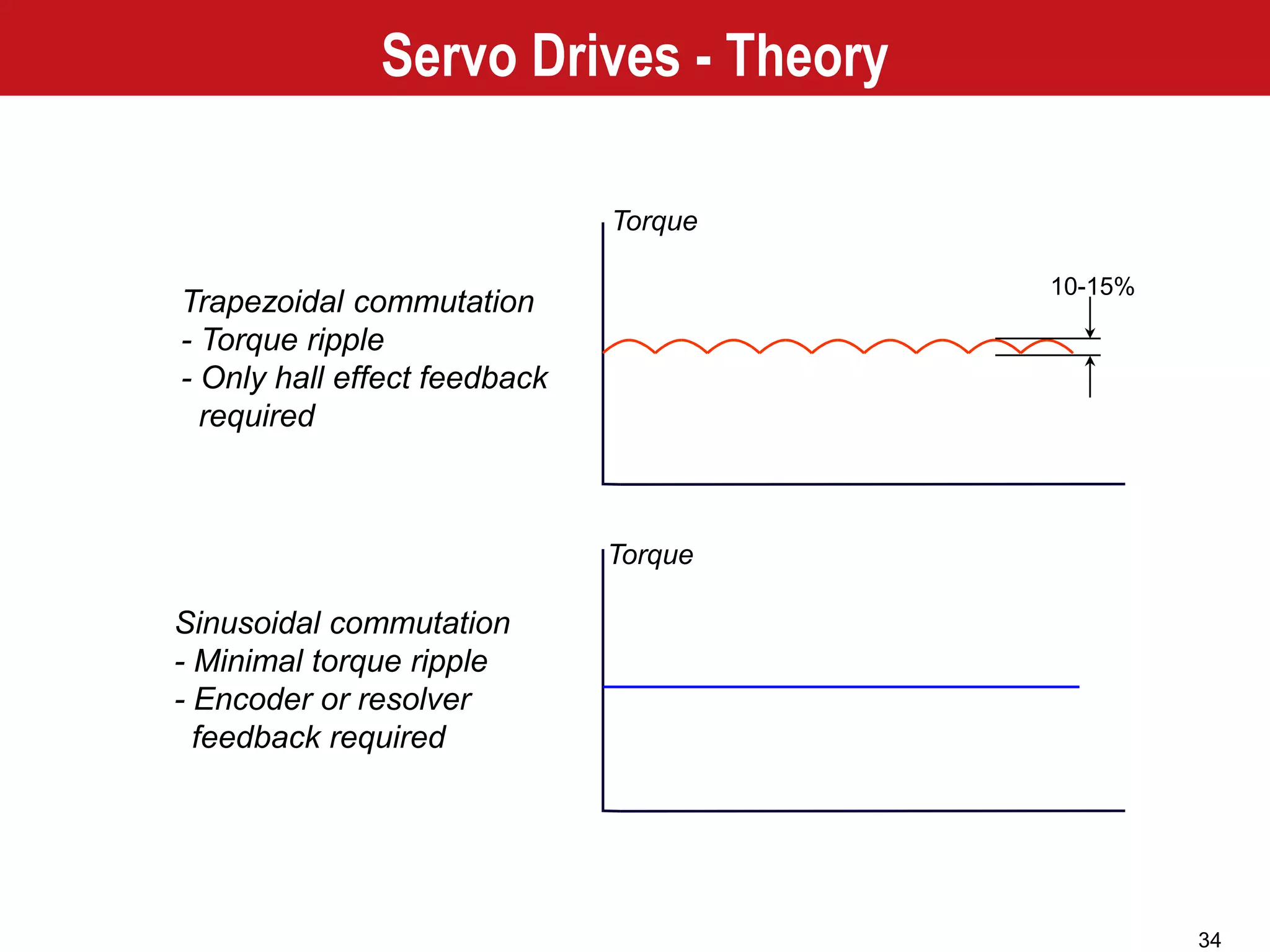
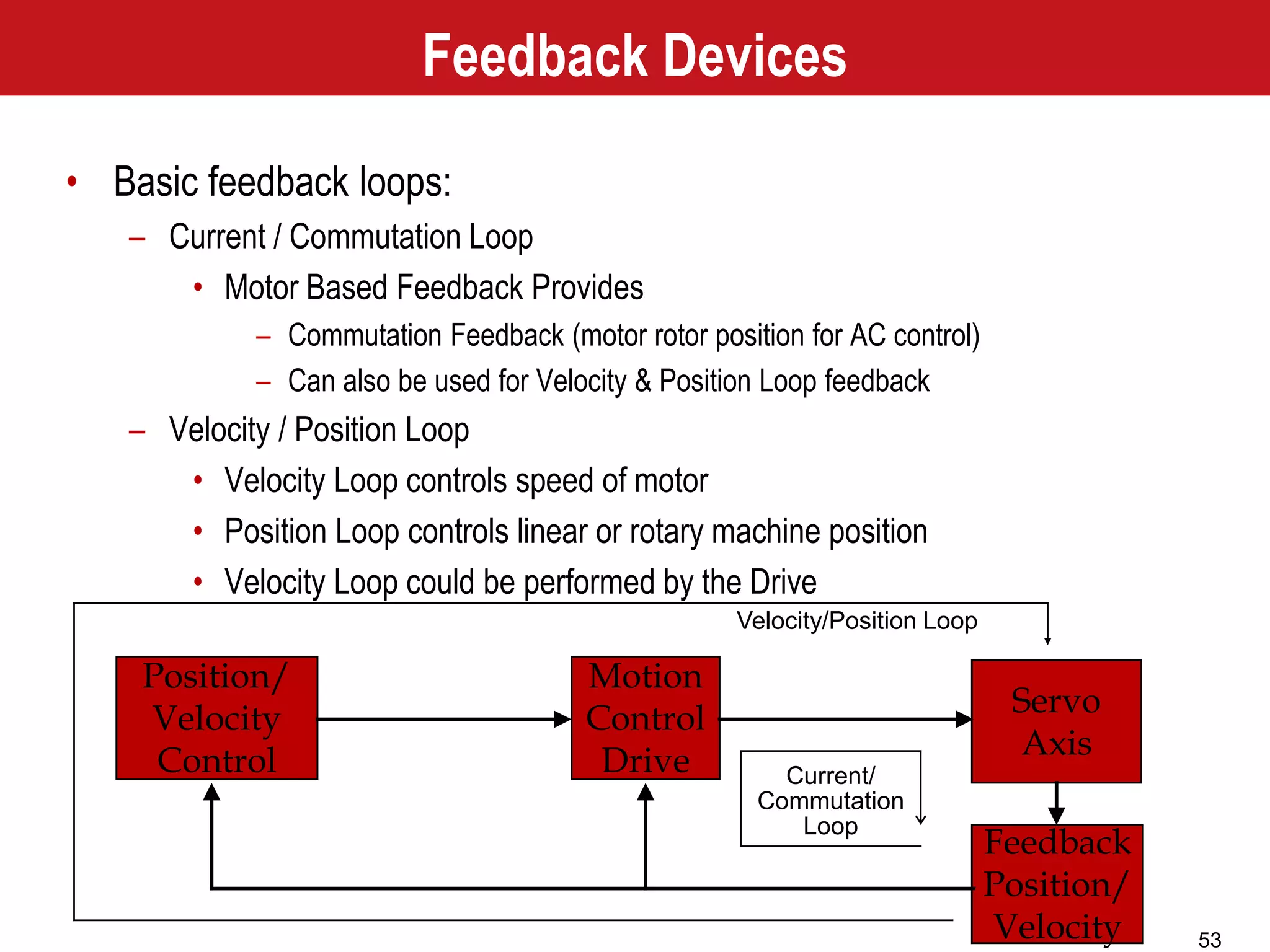
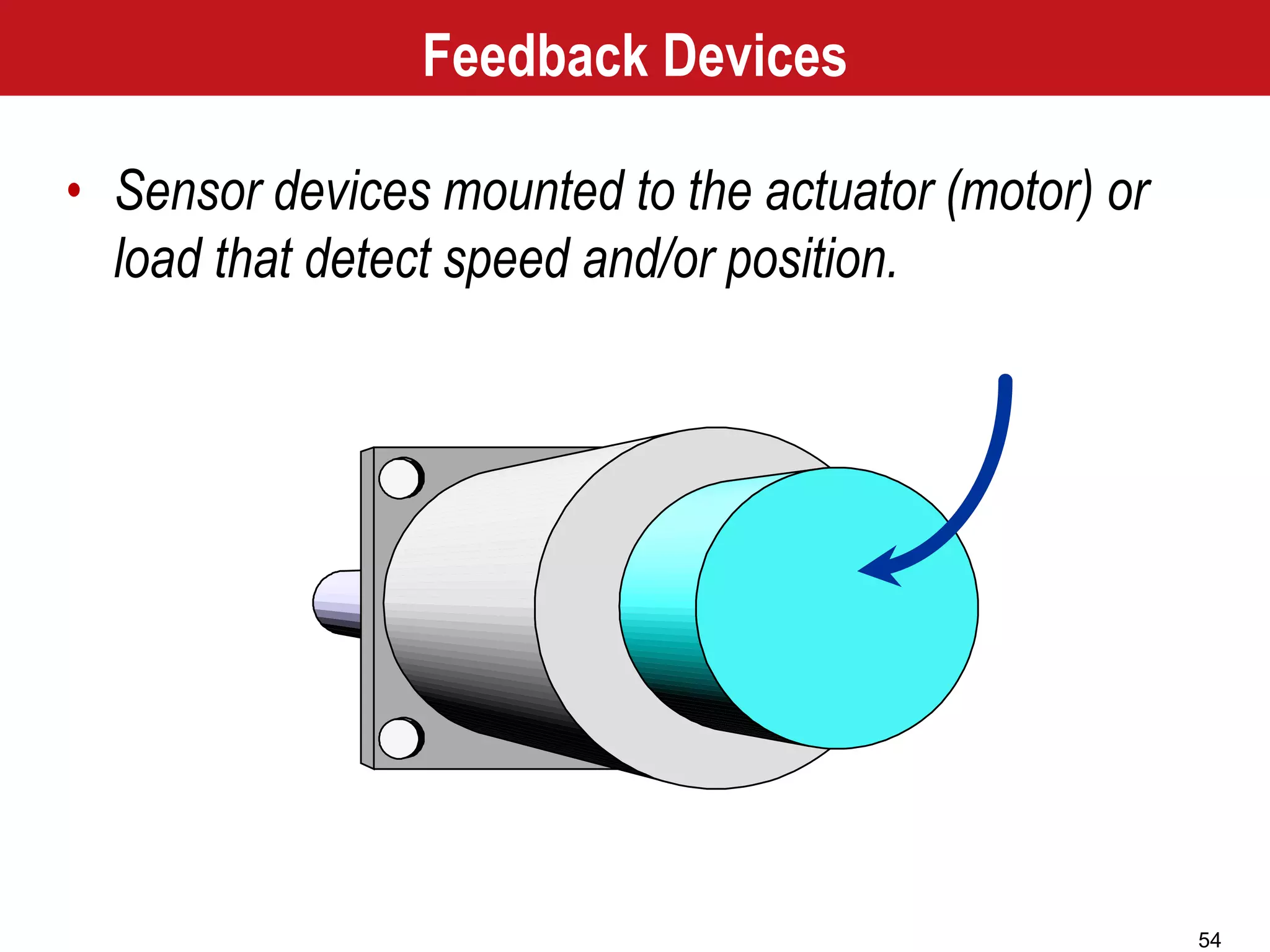
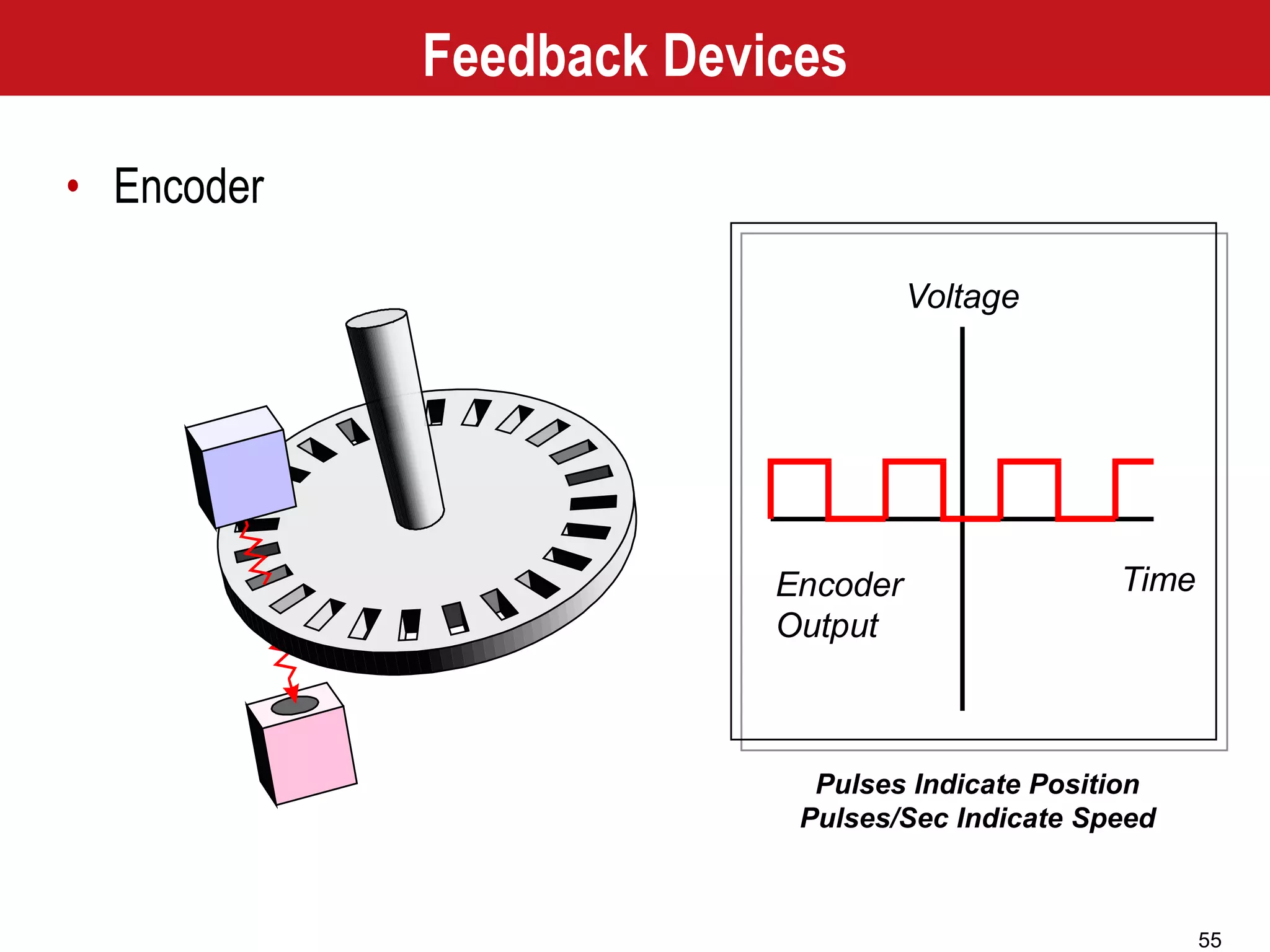
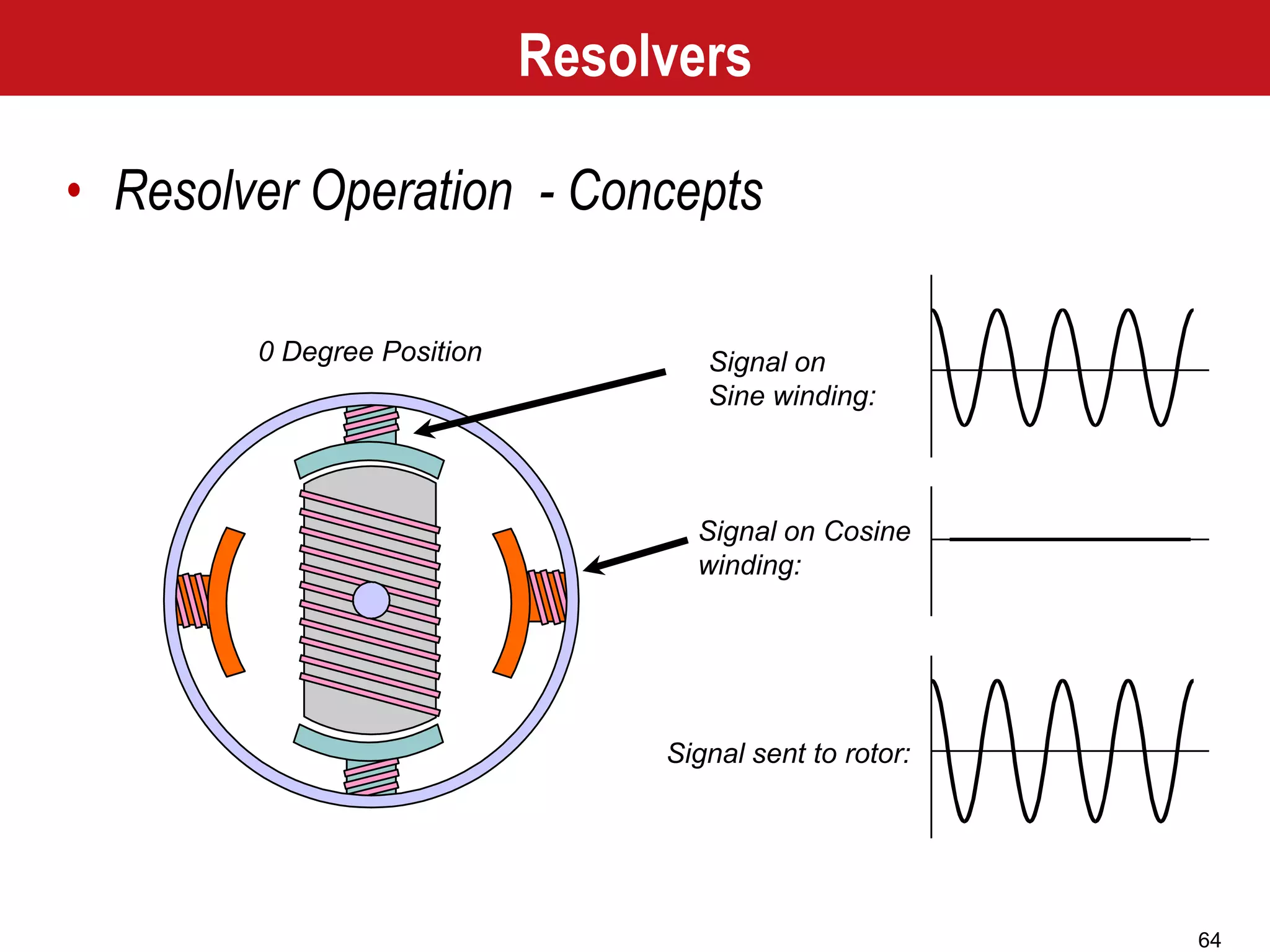
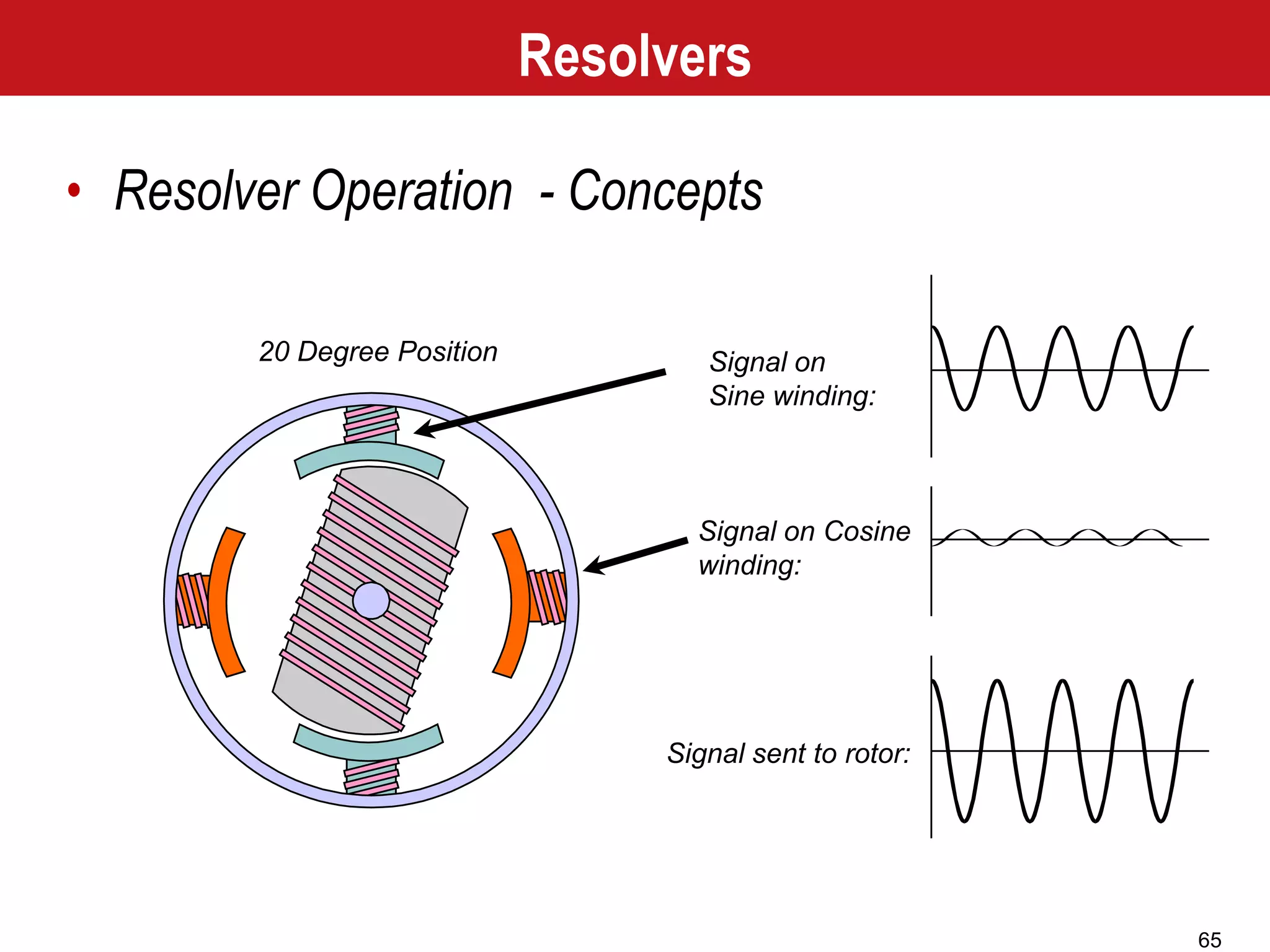
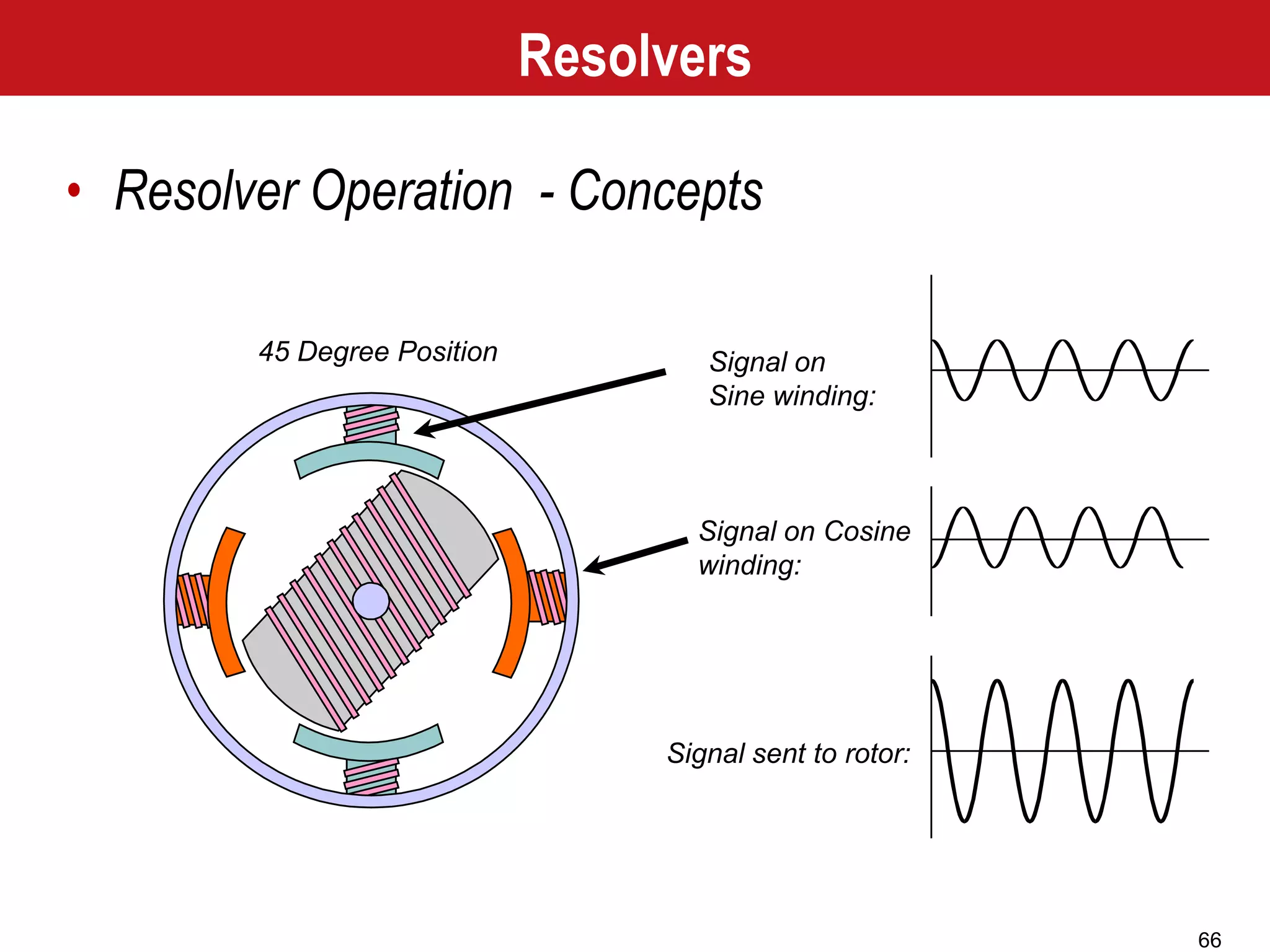
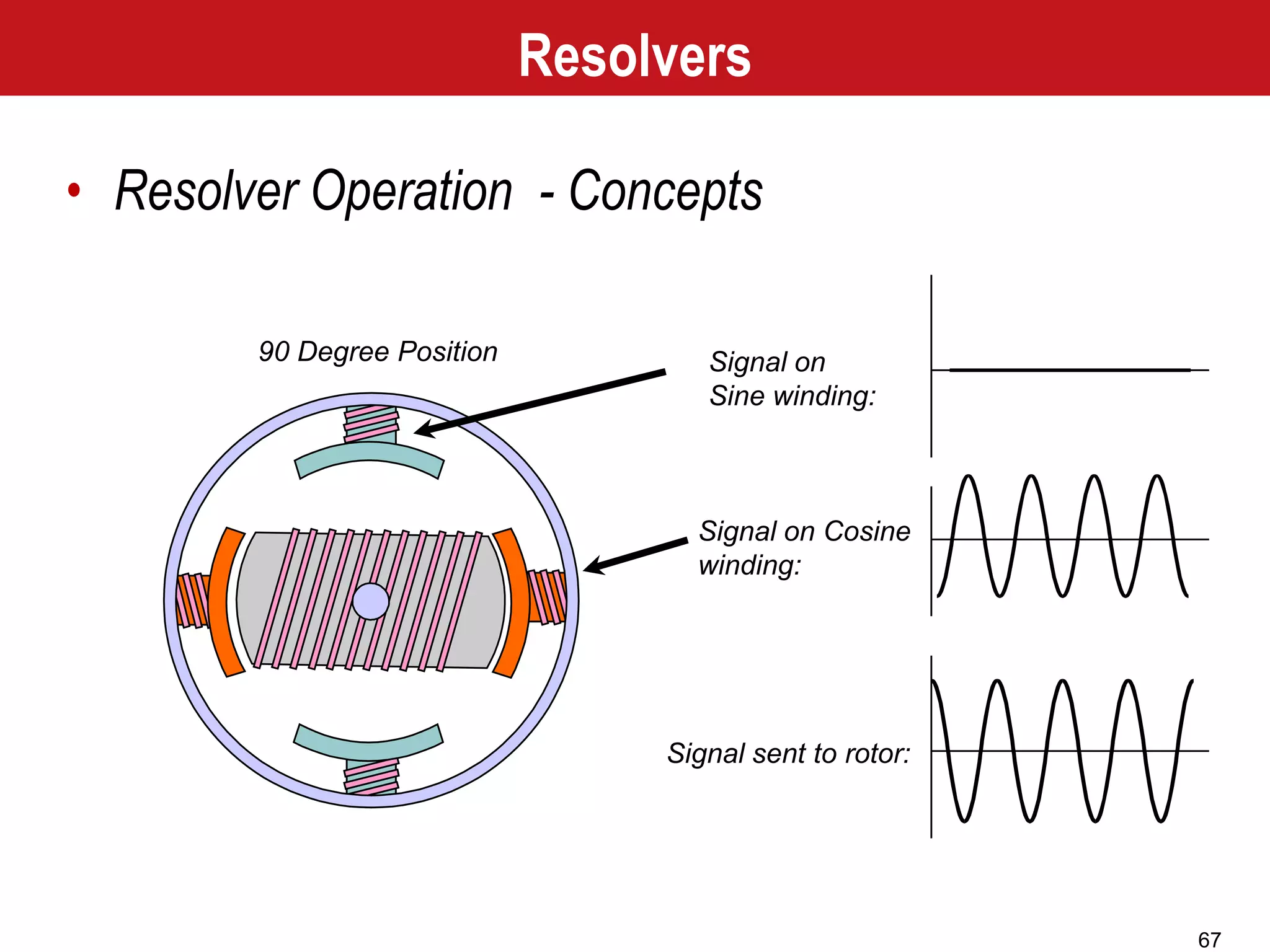
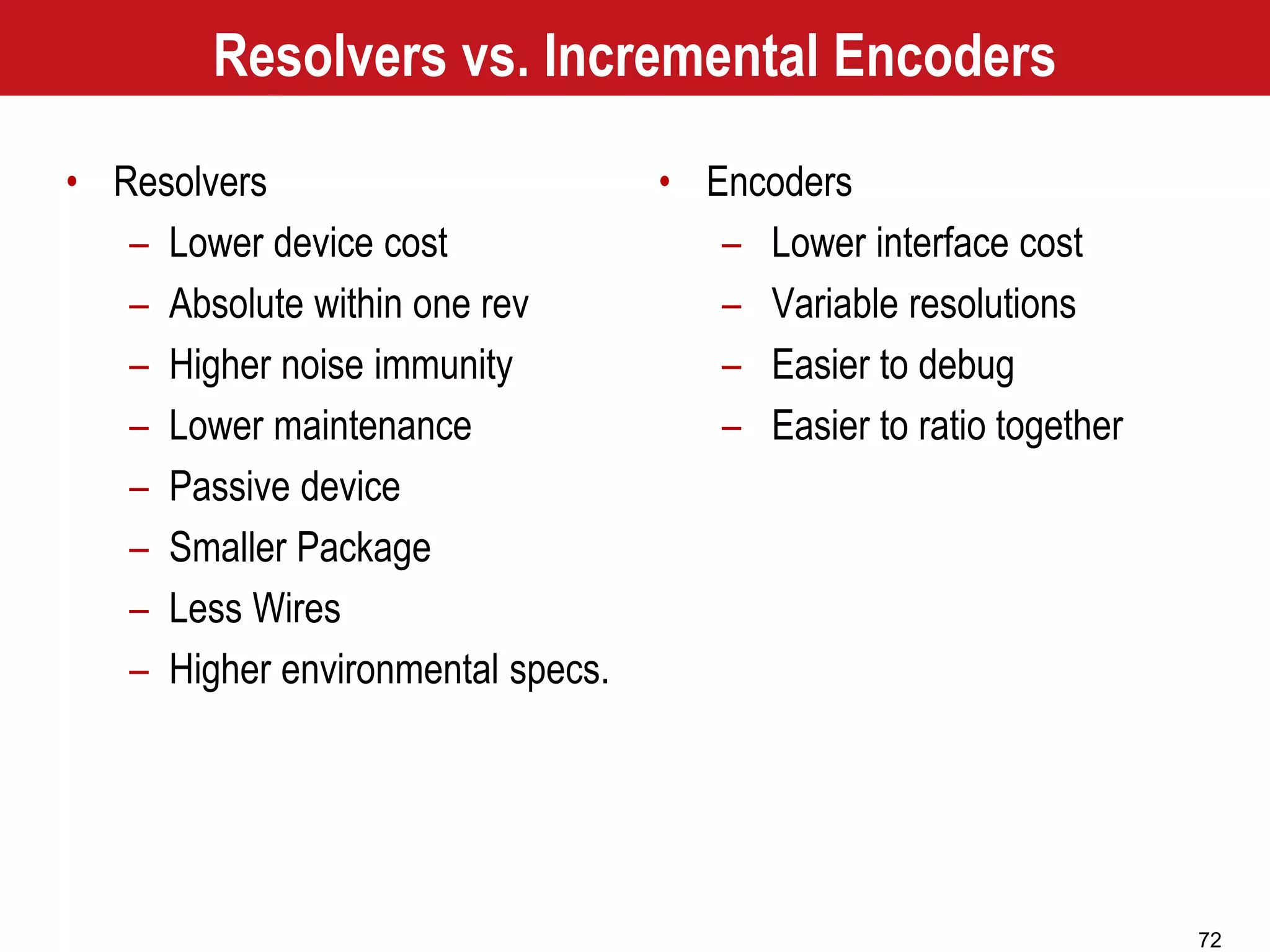
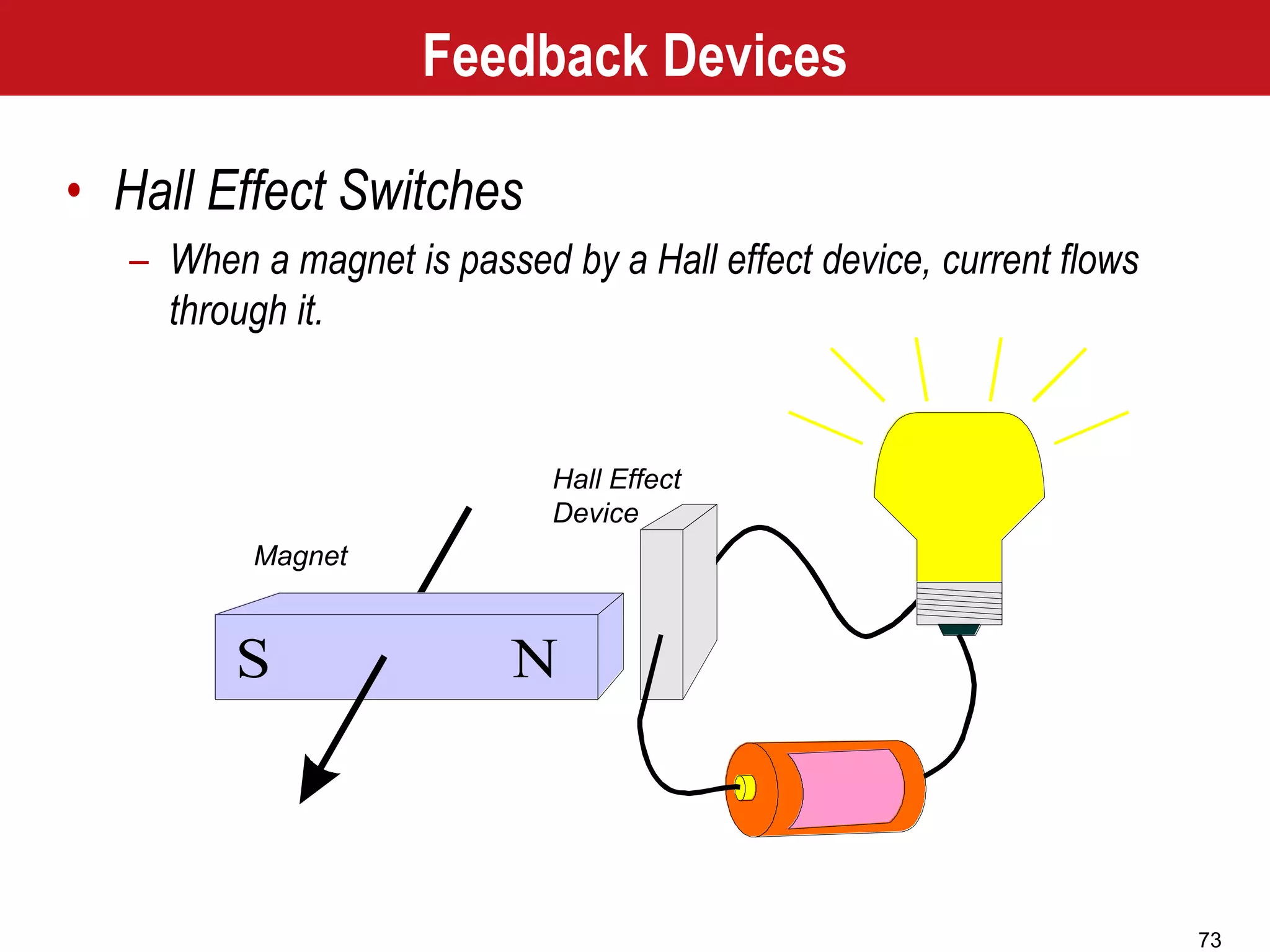
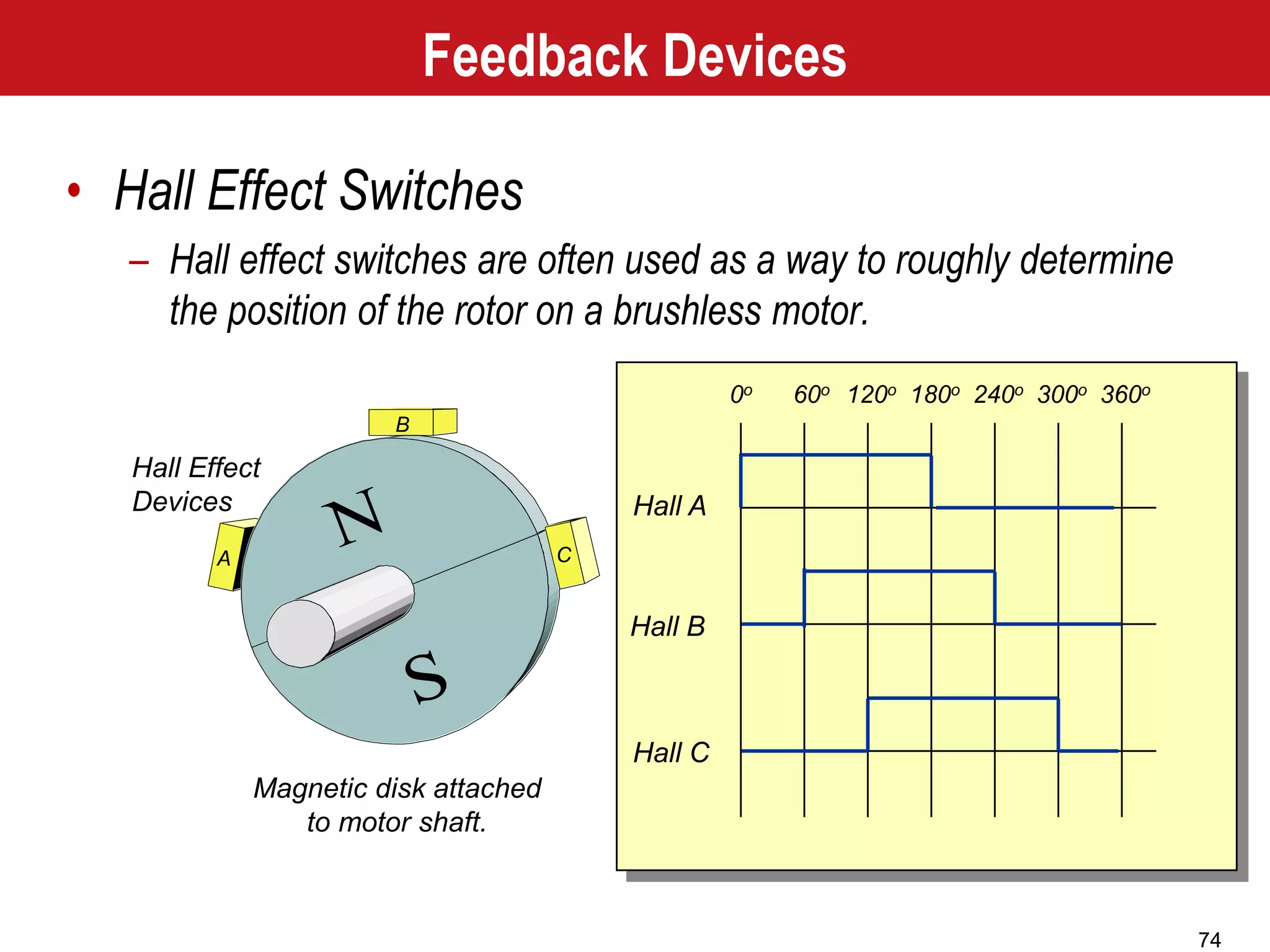
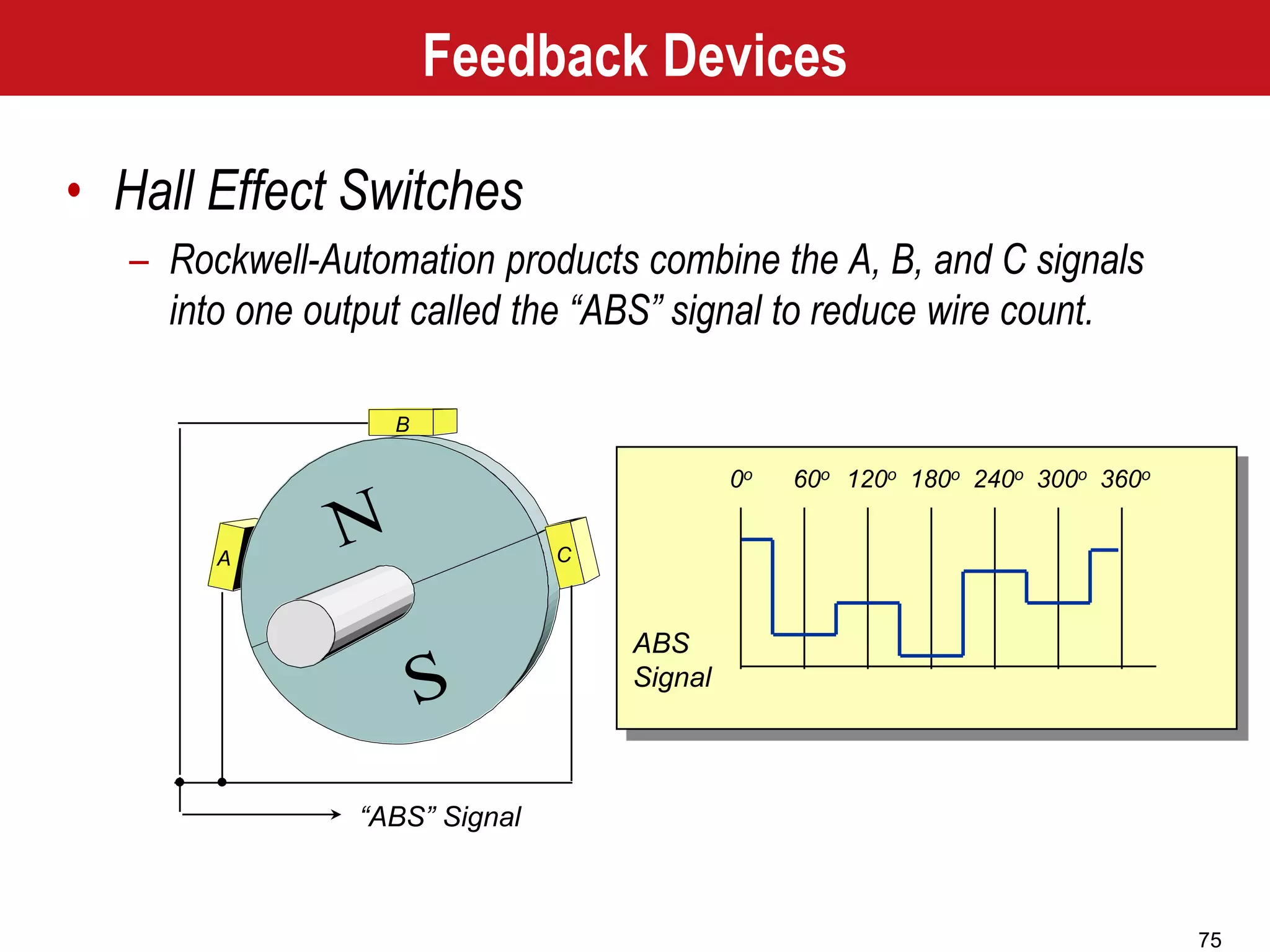
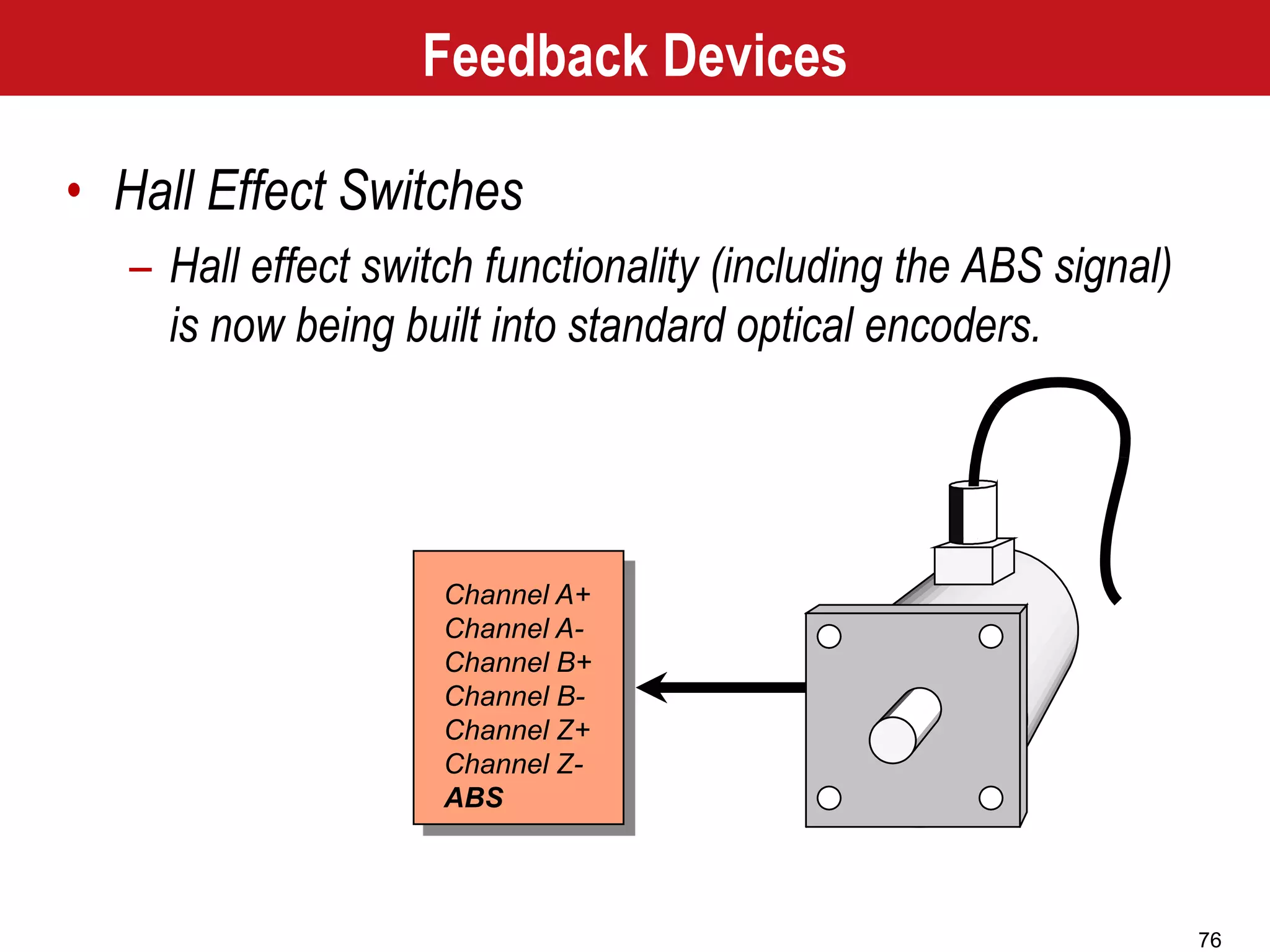
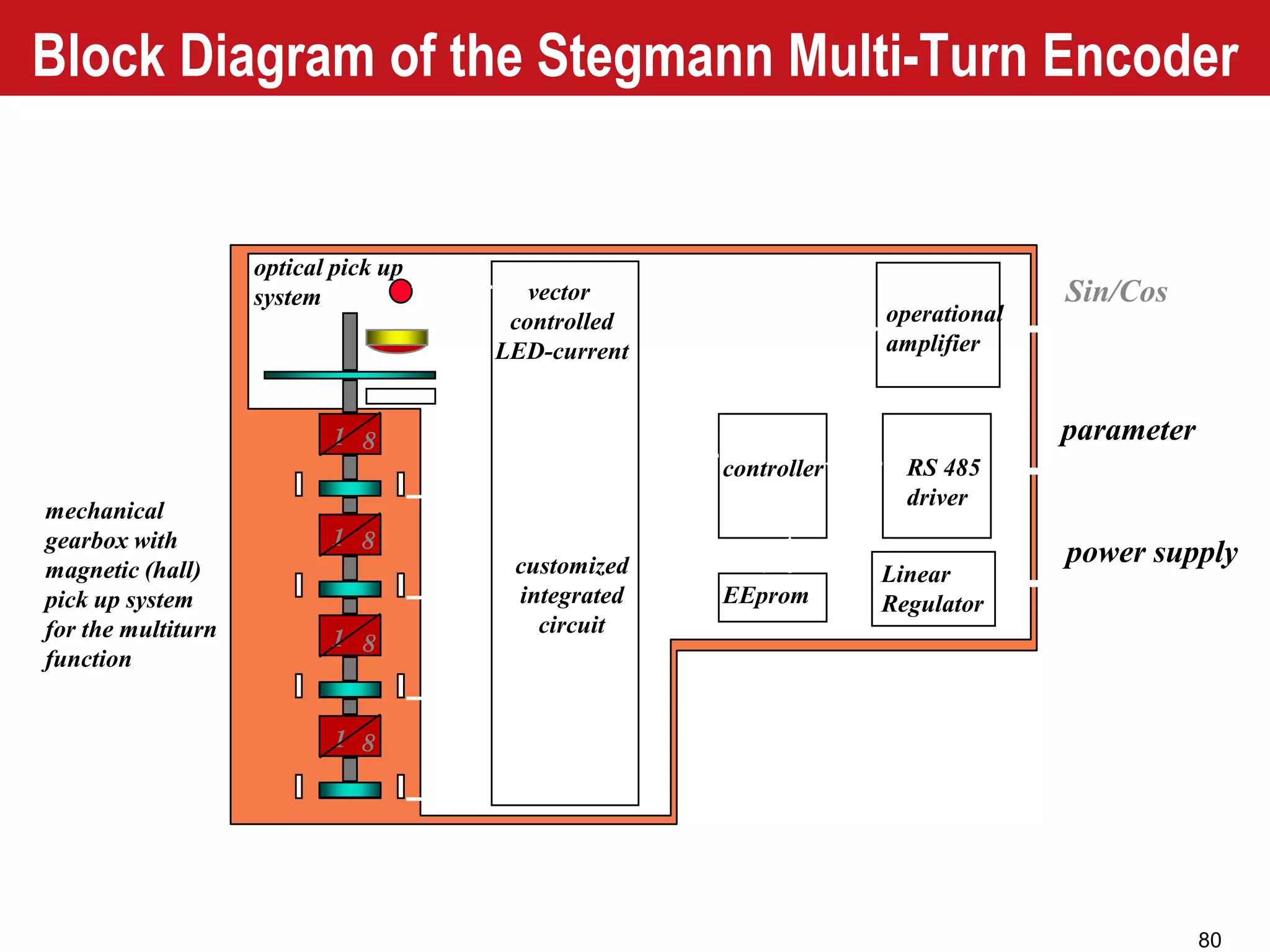
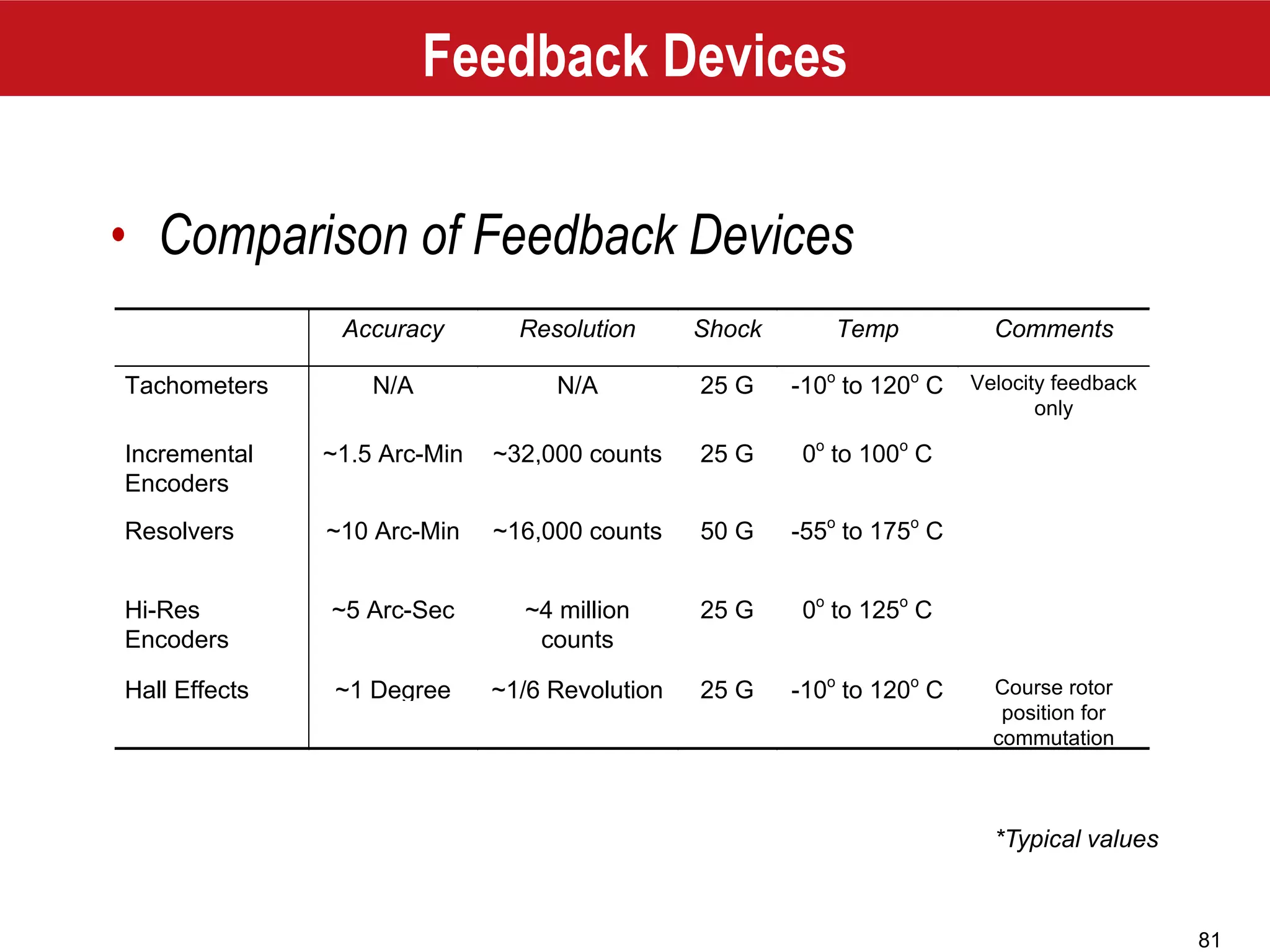
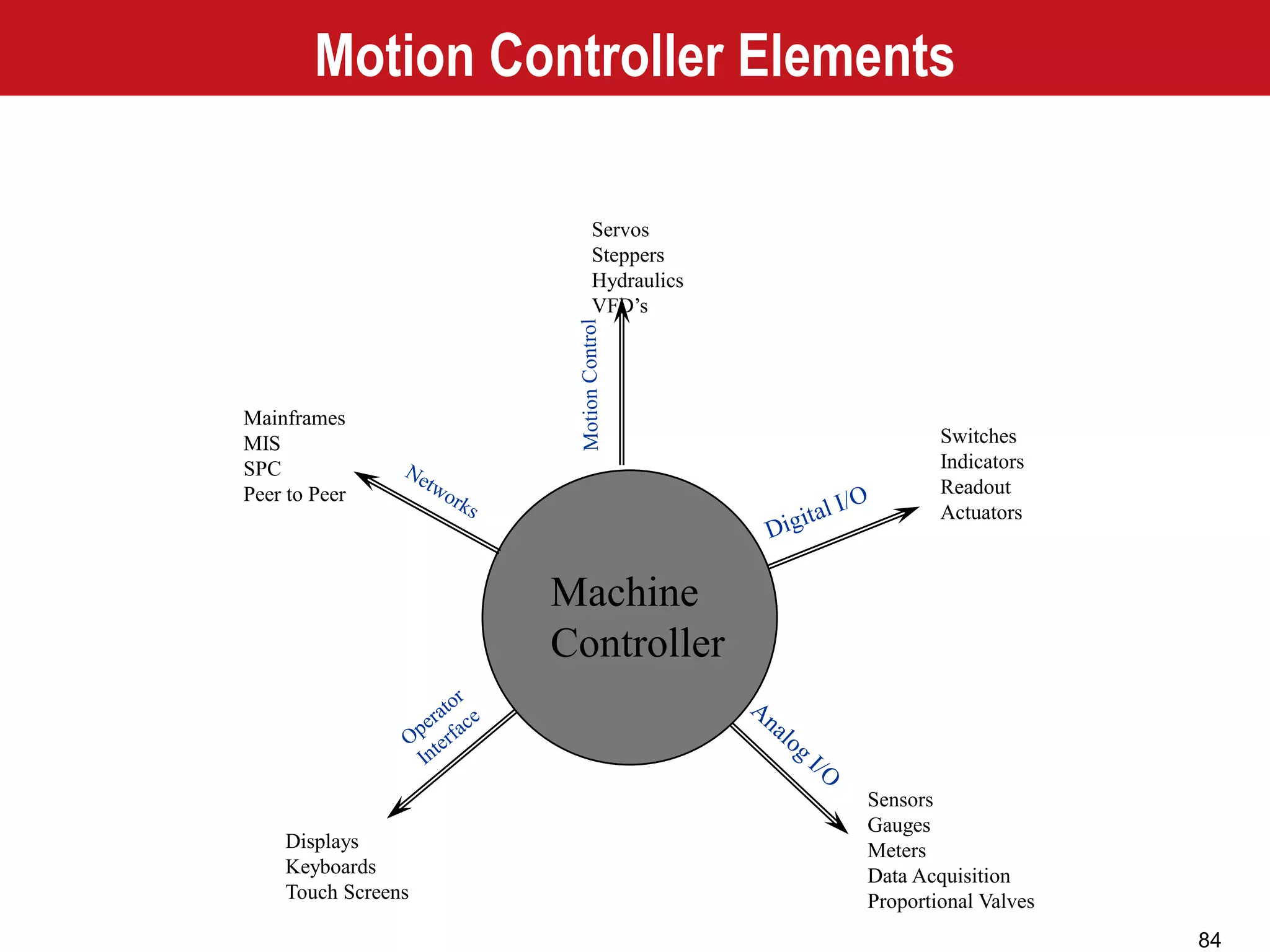
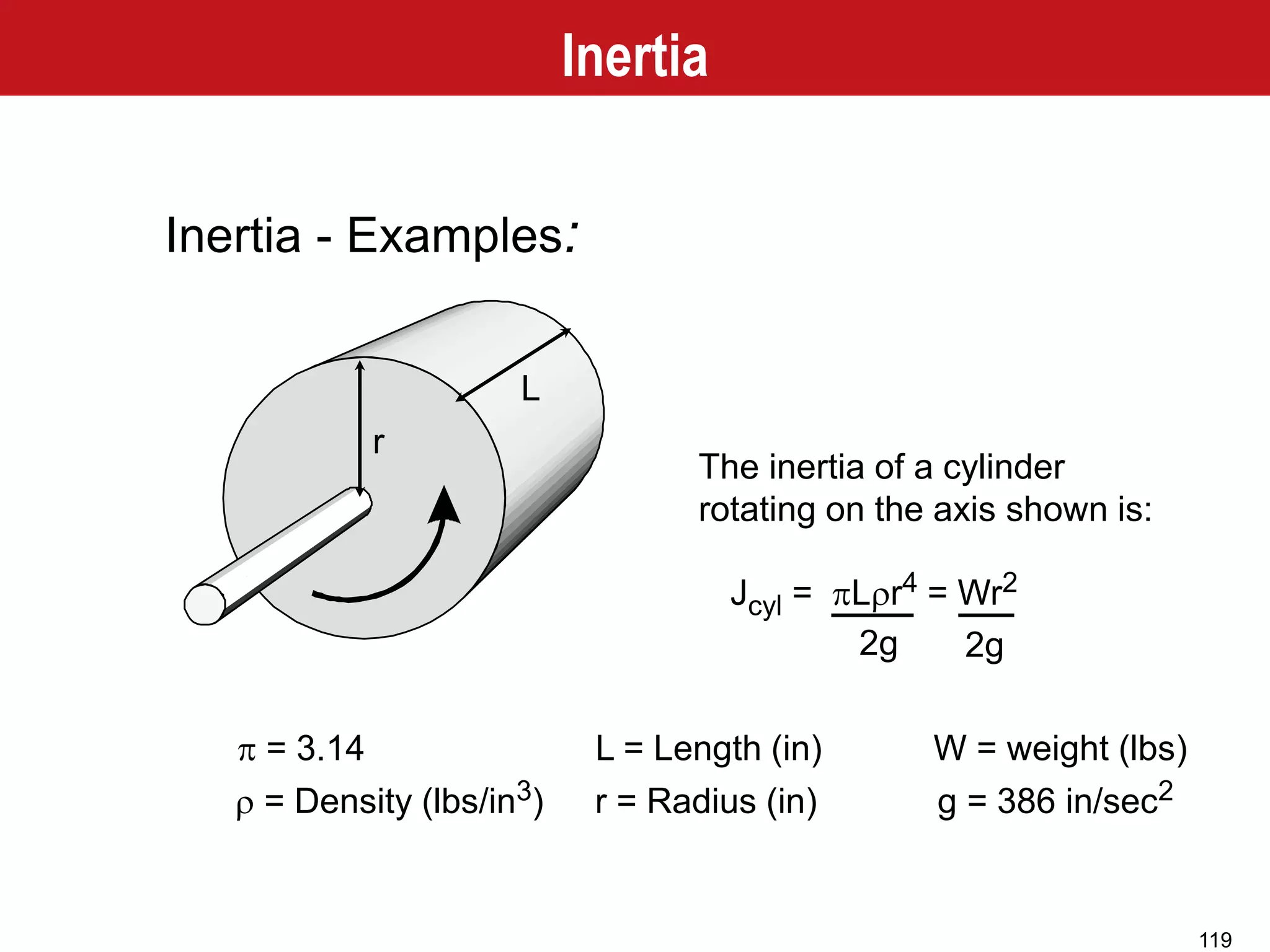
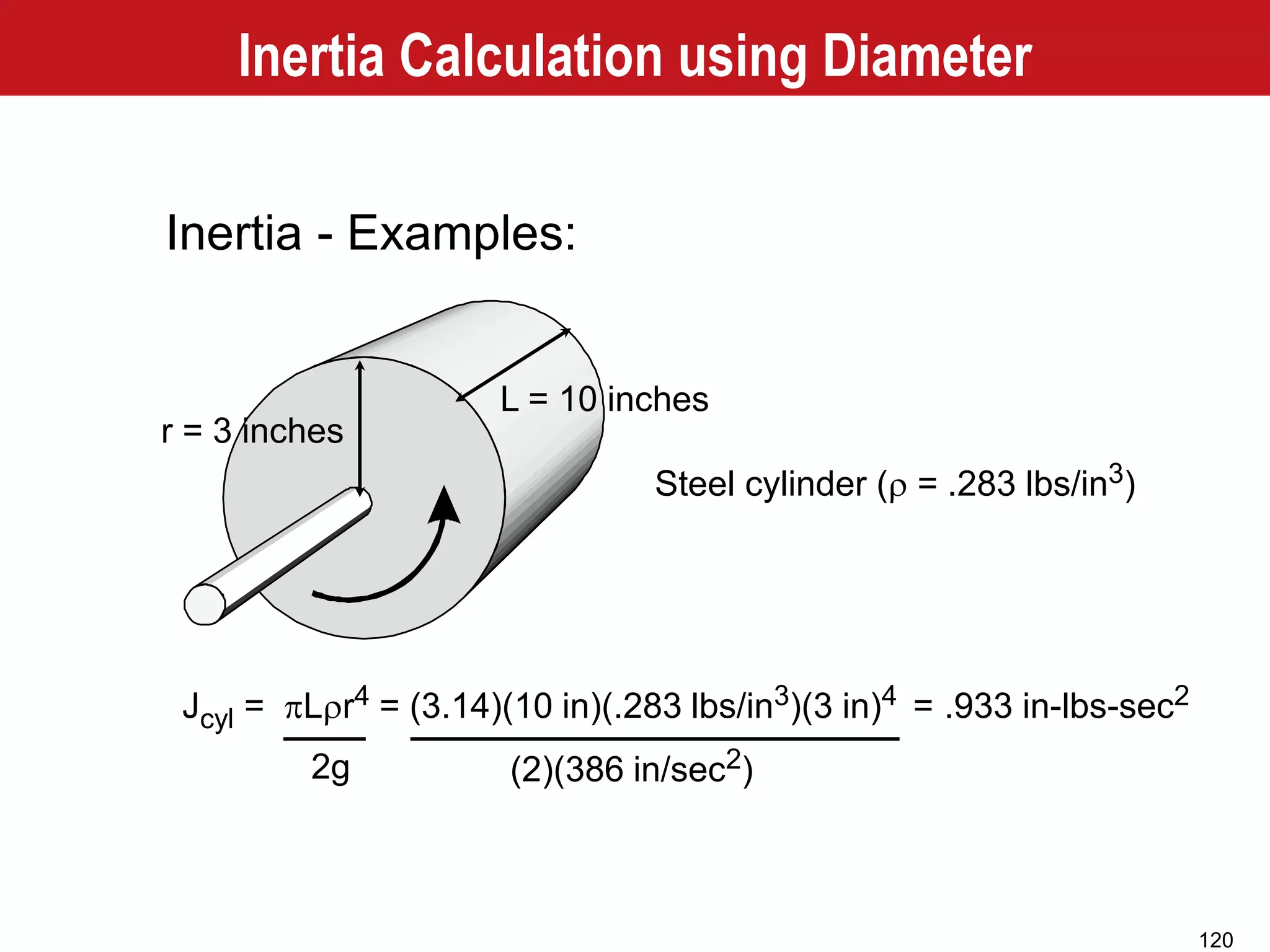
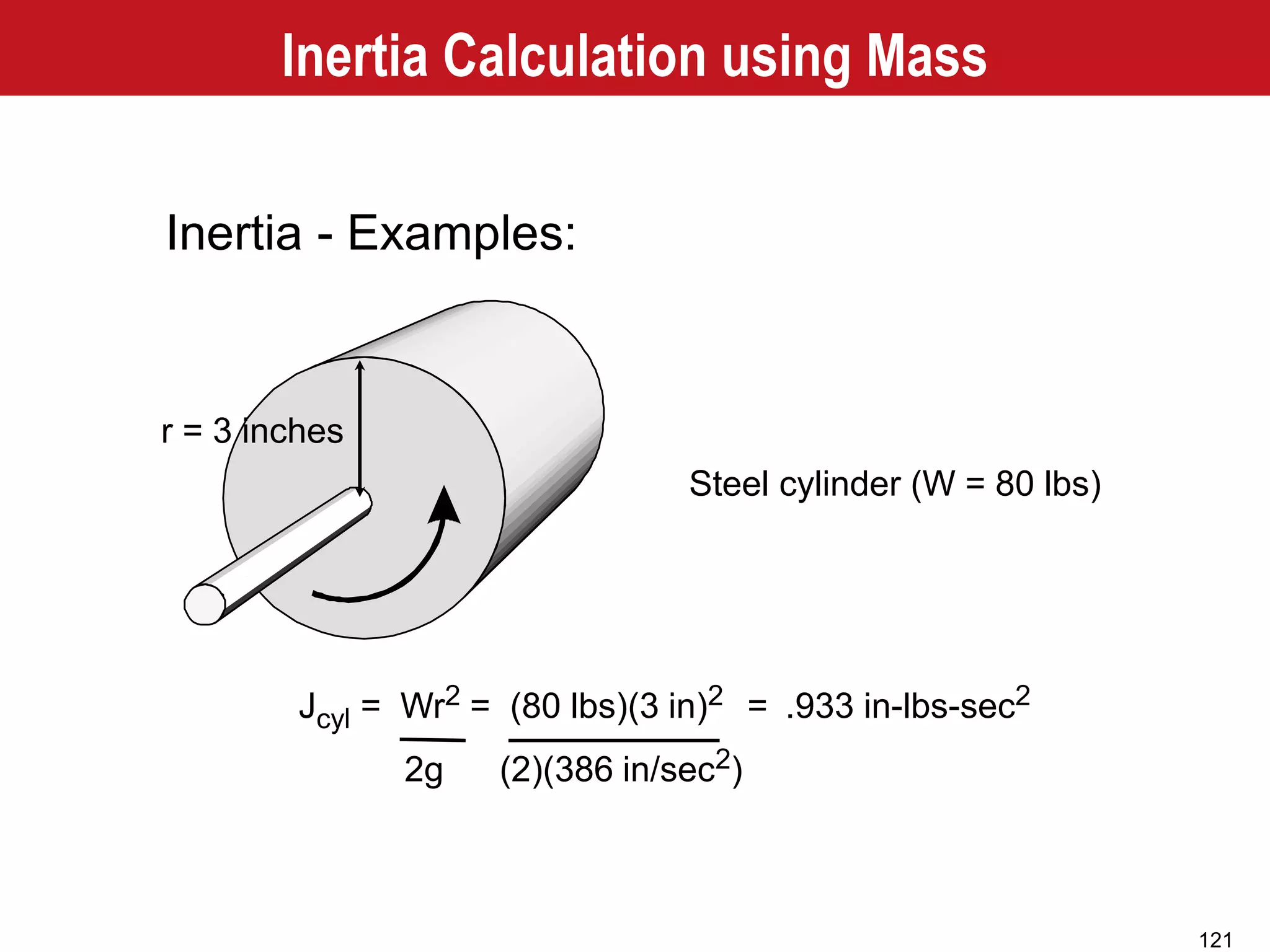
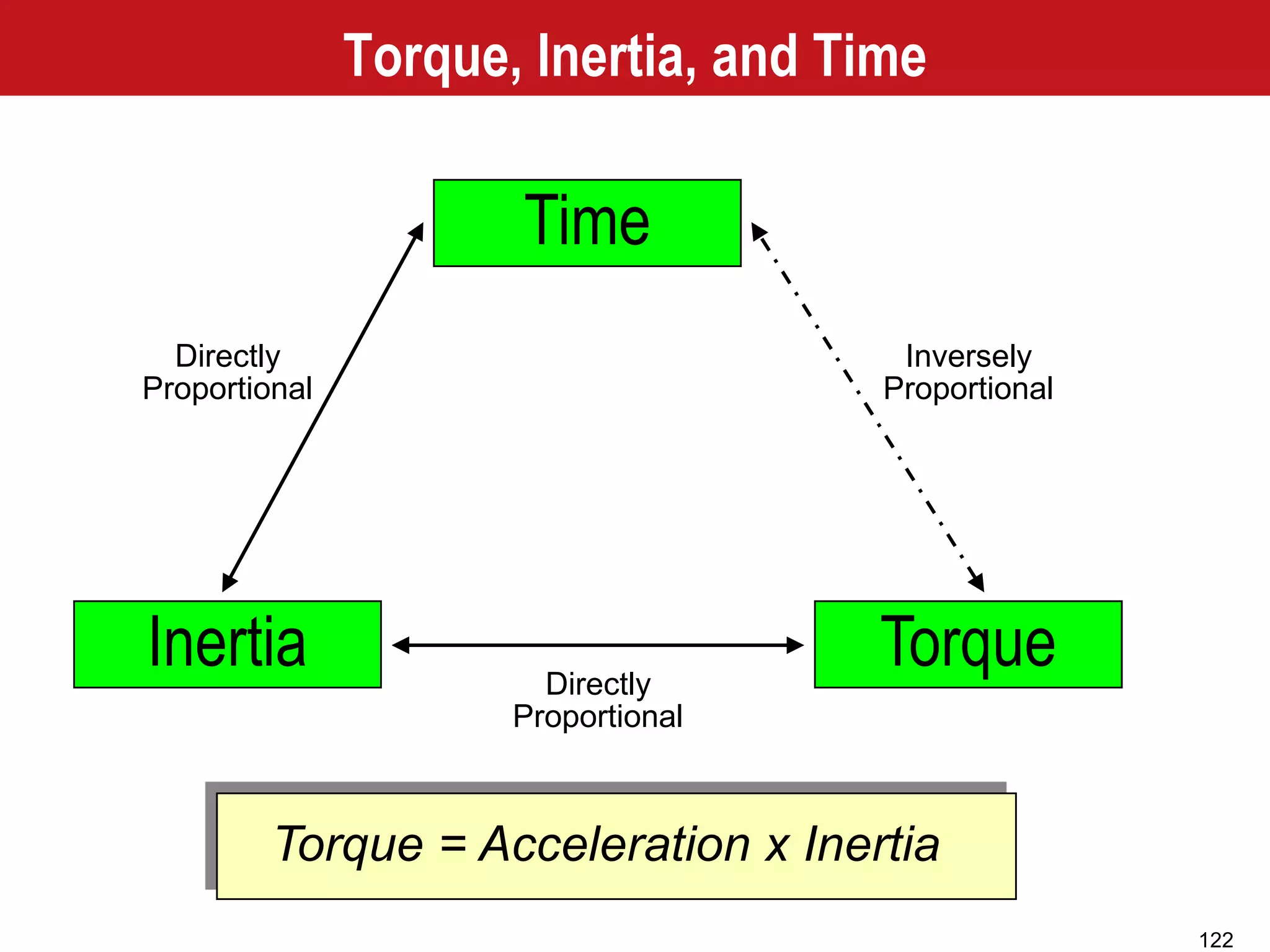

The document details motion control theory, covering concepts such as closed loop systems, servo motors, and feedback types essential for precise control of position, speed, and torque. It explains the functions and components of motion control systems, including servo drives, mechanical gearing, and feedback devices like encoders and resolvers. Additionally, it describes performance characteristics and considerations for different types of motors, emphasizing the importance of inertia matching for optimal system efficiency.