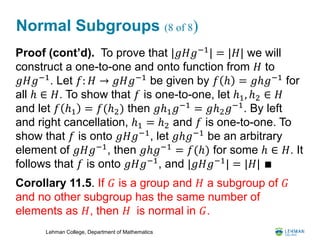
1) The document discusses normal subgroups, providing examples and theorems about their properties.
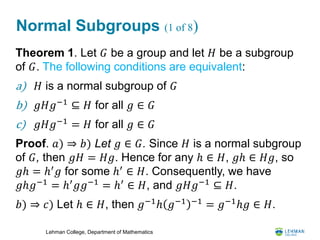
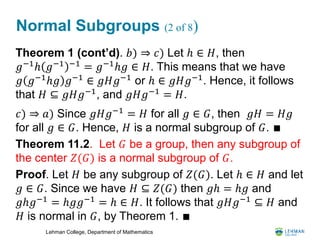
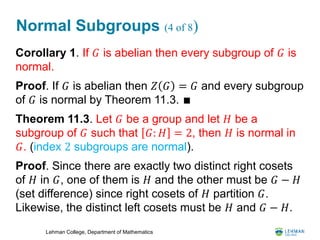
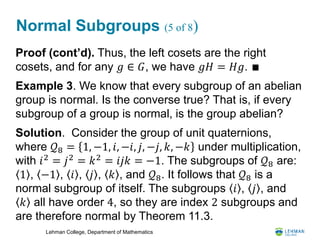
2) A subgroup H of a group G is normal if aH=Ha for all a in G. Some key results are that subgroups of abelian groups and subgroups of index 2 are always normal.
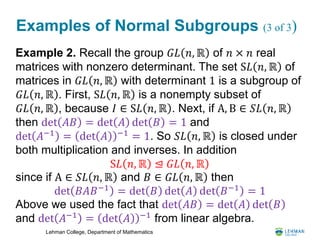
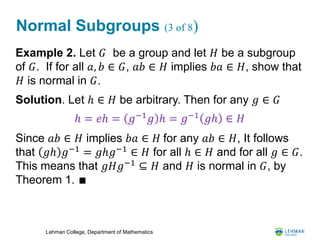
3) The document provides examples of normal subgroups, such as the special linear group SLn,R being normal in the general linear group GLn,R. It also gives a counterexample to show not all groups where every subgroup is normal must be abelian.
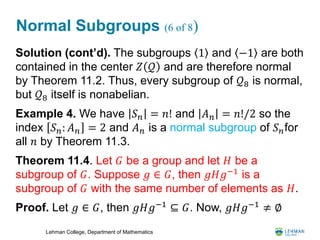
![Lehman College, Department of Mathematics
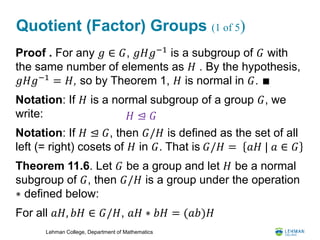
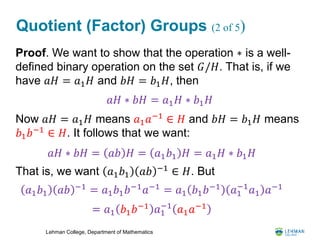
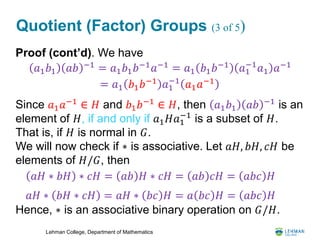
Quotient (Factor) Groups (5 of 5)
Definition: Let 𝐺 be a group and let 𝐻 be a normal
subgroup of 𝐺. Then the group 𝐺/𝐻 of all left cosets of
𝐻 in 𝐺 under the binary operation 𝑎𝐻 ∗ 𝑏𝐻 = (𝑎𝑏)𝐻 is
called the quotient group or factor group of 𝐺 by 𝐻.
We defined [𝐺: 𝐻] (the index of 𝐻 and 𝐺) as the number
of distinct left (or right) cosets. Since 𝐺/𝐻 is the set of
all left (or right) cosets of a normal subgroup 𝐺, then:
If the group 𝐺 is finite, then by Lagrange’s Theorem, we
have 𝐺: 𝐻 =
|𝐺|
|𝐻|
. It follows that for finite groups 𝐺:
|𝐺/𝐻| = [𝐺: 𝐻]
|𝐺/𝐻| =
|𝐺|
|𝐻|](https://image.slidesharecdn.com/20200422normalsubgroups-200422130140/85/Section-11-Normal-Subgroups-19-320.jpg)