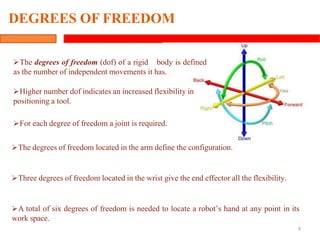
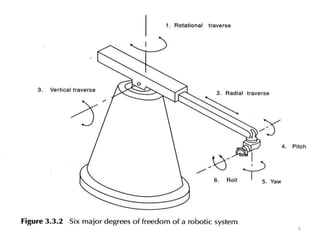
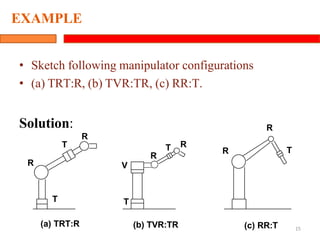
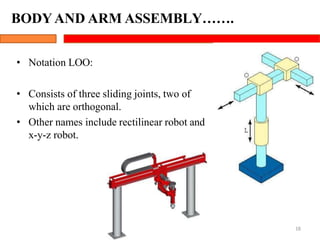
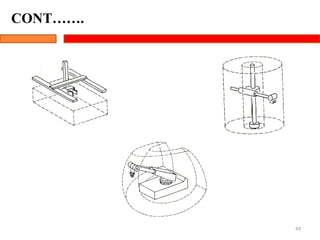
The document provides an introduction to robotics, including definitions, characteristics, and historic views. It discusses the degrees of freedom of robots and describes the typical arm and wrist configurations. The document outlines the common body and arm assemblies including rectangular, cylindrical, spherical, jointed arm, and SCARA configurations. It also describes robot anatomy, joints, links, and classifications of joints.