Downloaded 1,178 times
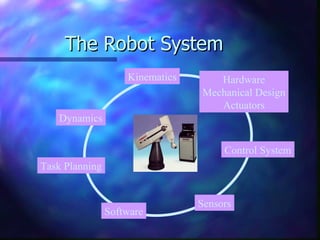
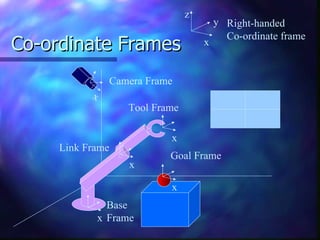

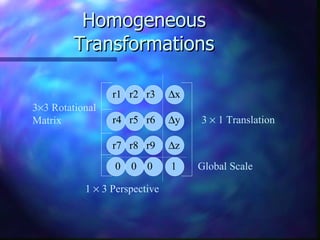


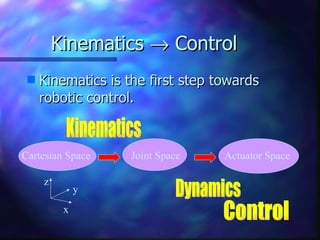
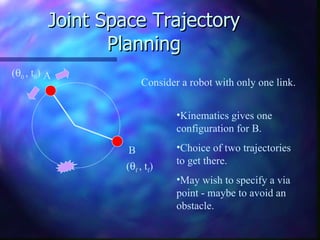
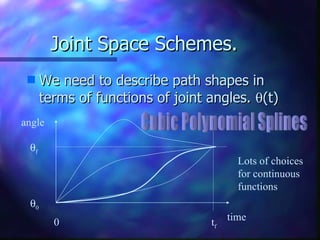


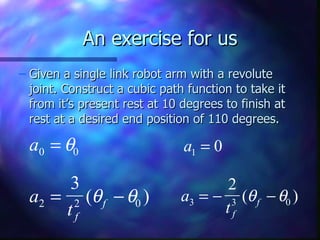


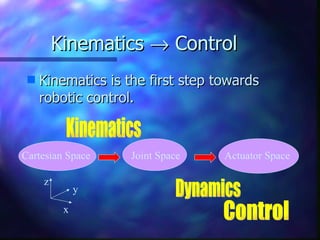

The document discusses robot kinematics and control. It covers topics like coordinate frames, homogeneous transformations, forward and inverse kinematics, joint space trajectories, and cubic polynomial path planning. Specifically: 1) Kinematics is the study of robot motion without regard to forces or moments. It describes the spatial configuration using coordinate frames and homogeneous transformations. 2) Forward kinematics determines end effector position from joint angles. Inverse kinematics determines joint angles for a desired end effector position. 3) Joint space trajectories plan motion by describing joint angle profiles over time using functions like cubic polynomials and splines. 4) Cubic polynomials satisfy constraints like initial/final position and velocity to generate smooth motion profiles for a single revol
































































































