Downloaded 1,616 times
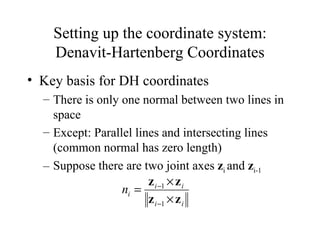
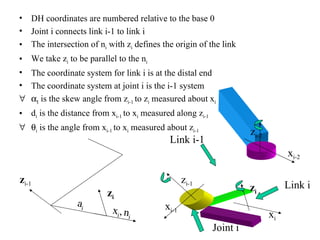
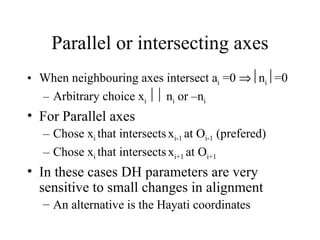
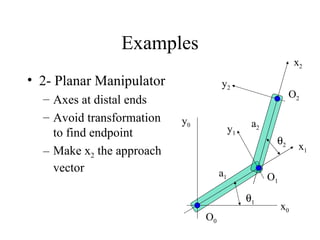
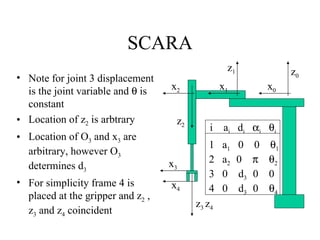
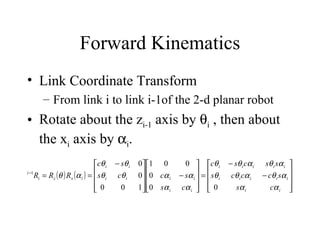
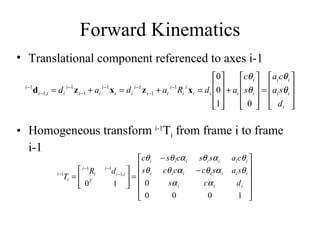
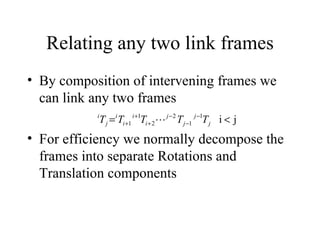
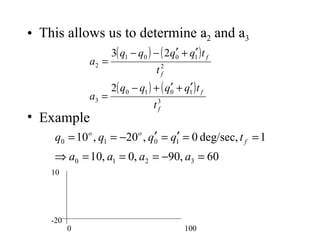

The document discusses forward kinematics, which is finding the position and orientation of the end effector given the joint angles of a robot. It covers different types of robot joints and configurations. It introduces the Denavit-Hartenberg coordinate system for defining the relationship between successive links of a robot. The document also discusses forward kinematic calculations, inverse kinematics, robot workspaces, and trajectory planning.

































































































