Downloaded 924 times



![Ajmer - Mysore Bi -Weekly Express at Bhairnayakanahalli Karnataka,
South Western Railways
[ Video: https://youtu.be/bb-FhOQm4ks ]](https://image.slidesharecdn.com/railwayengggeometricdesign-181106110413/75/Railway-engg-geometric-design-10-2048.jpg)





























![[Video: https://www.youtube.com/watch?v=agd8B-31bjE ]](https://image.slidesharecdn.com/railwayengggeometricdesign-181106110413/75/Railway-engg-geometric-design-57-2048.jpg)



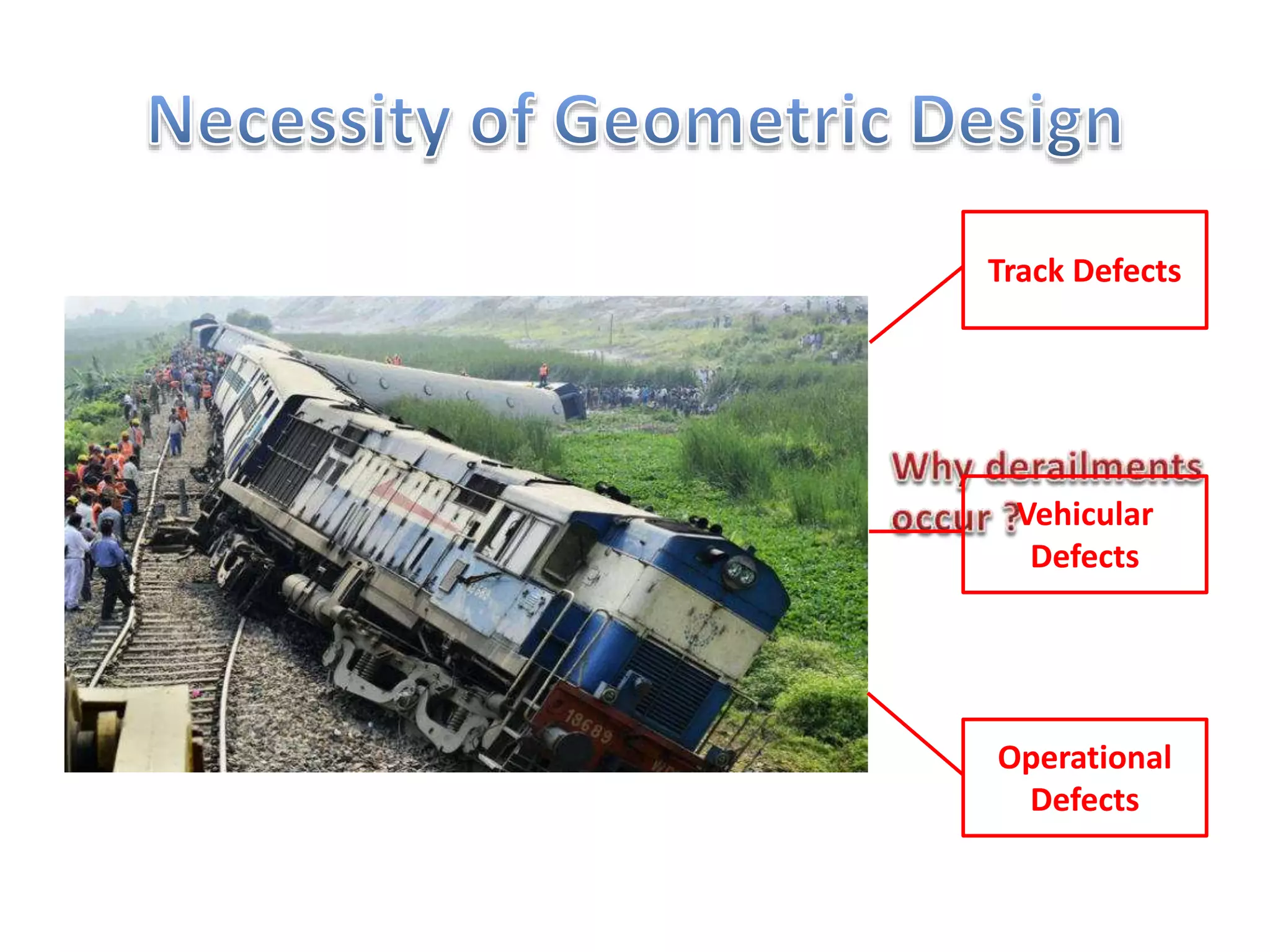
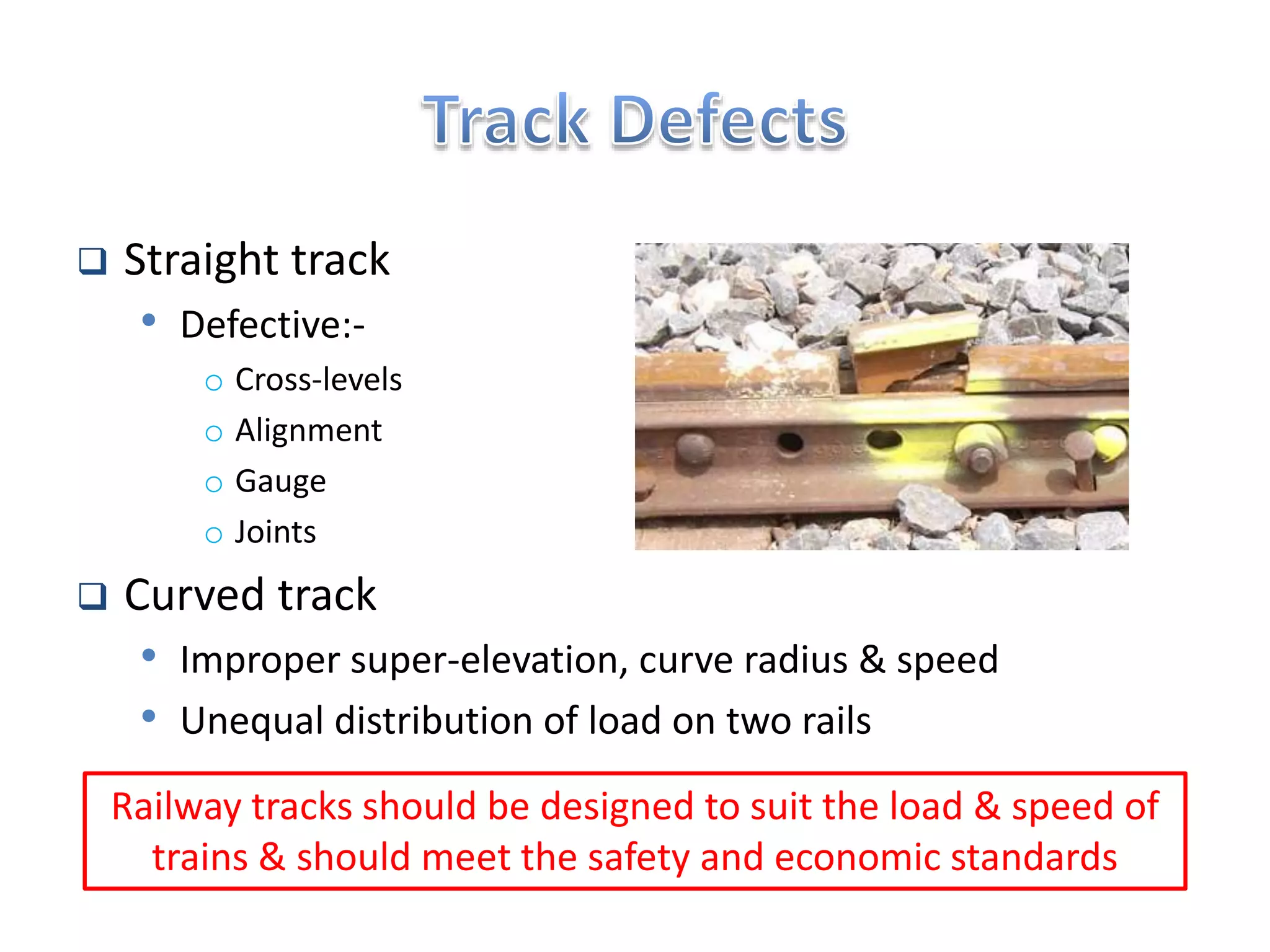
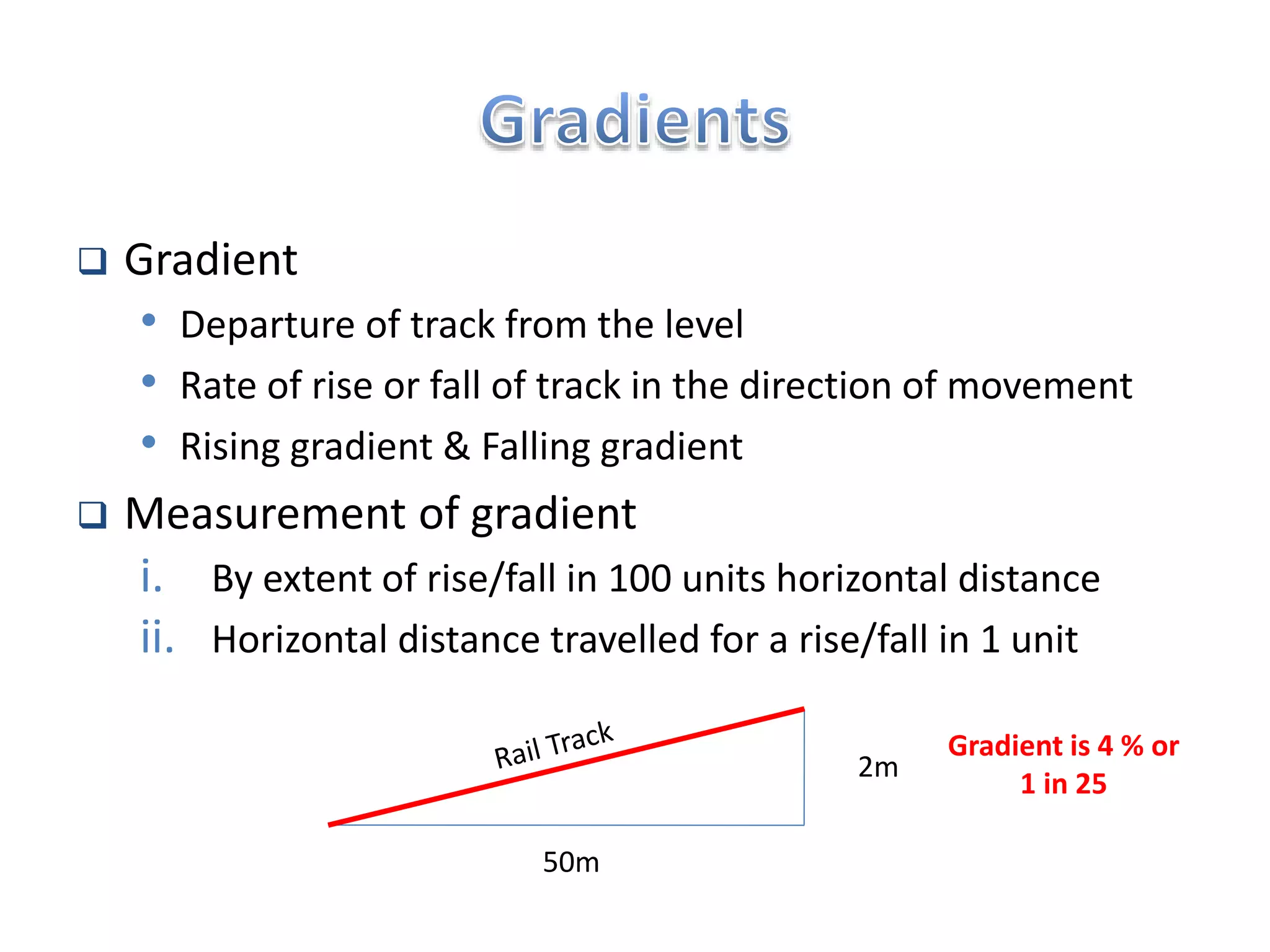
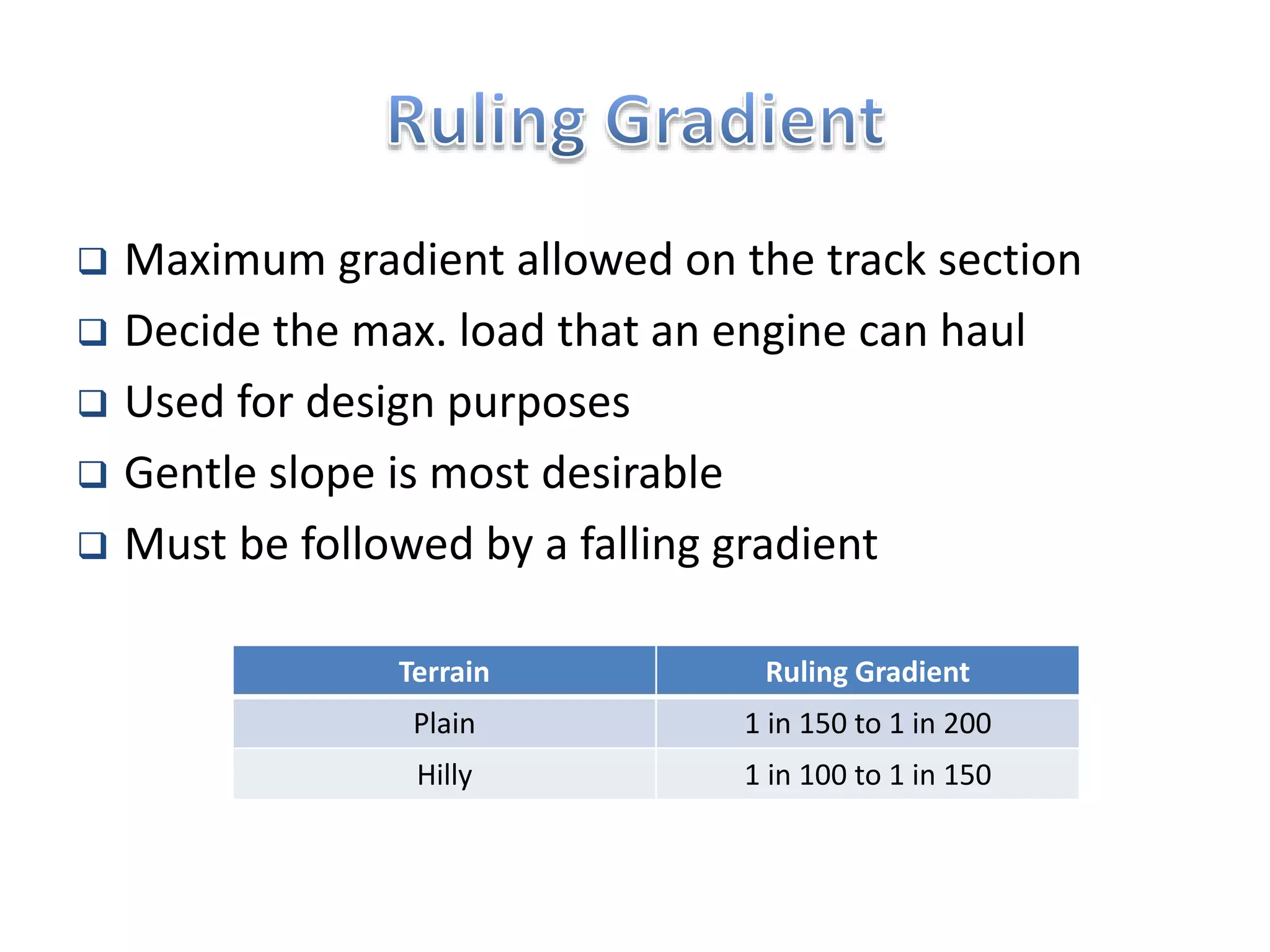
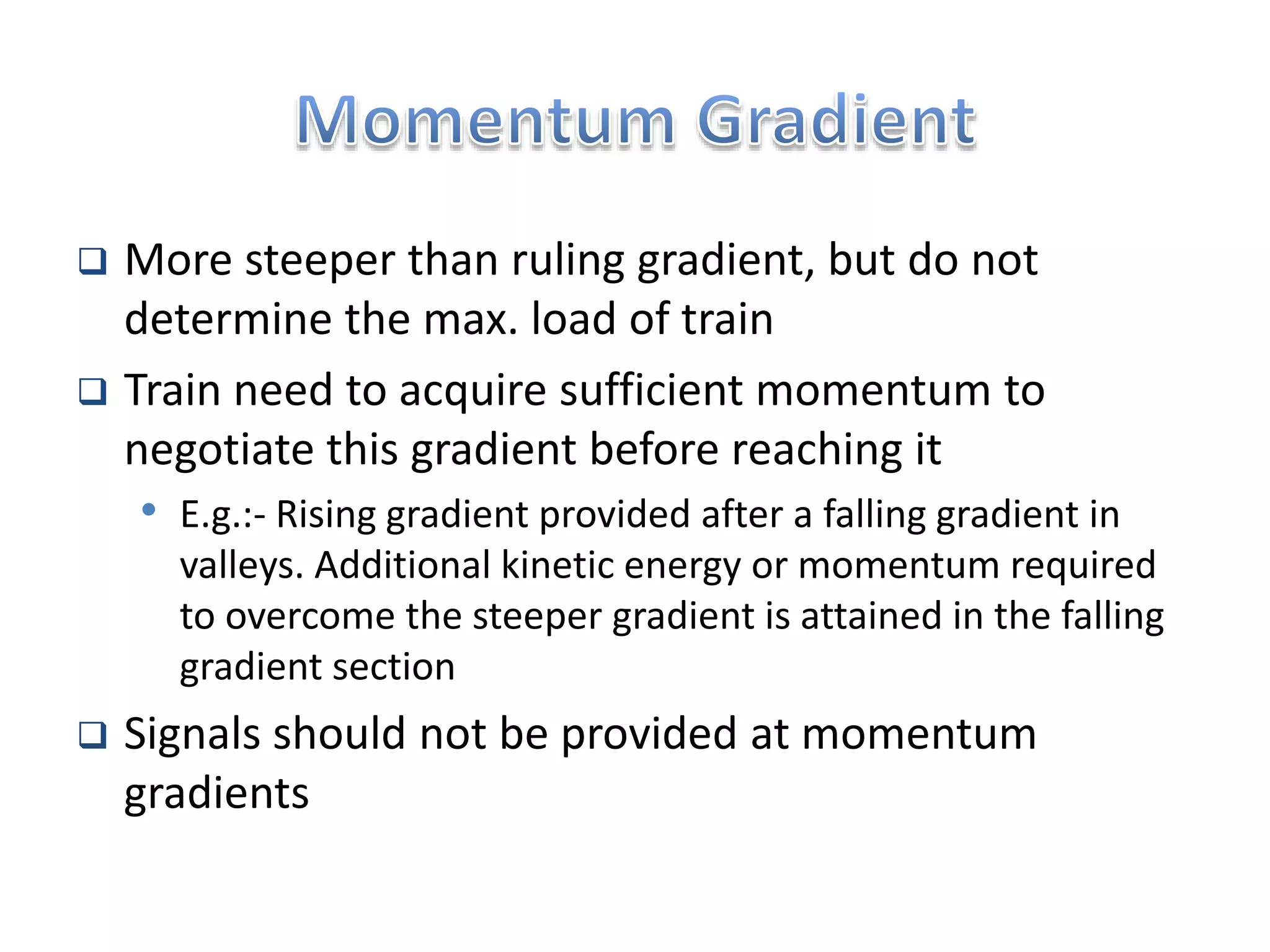
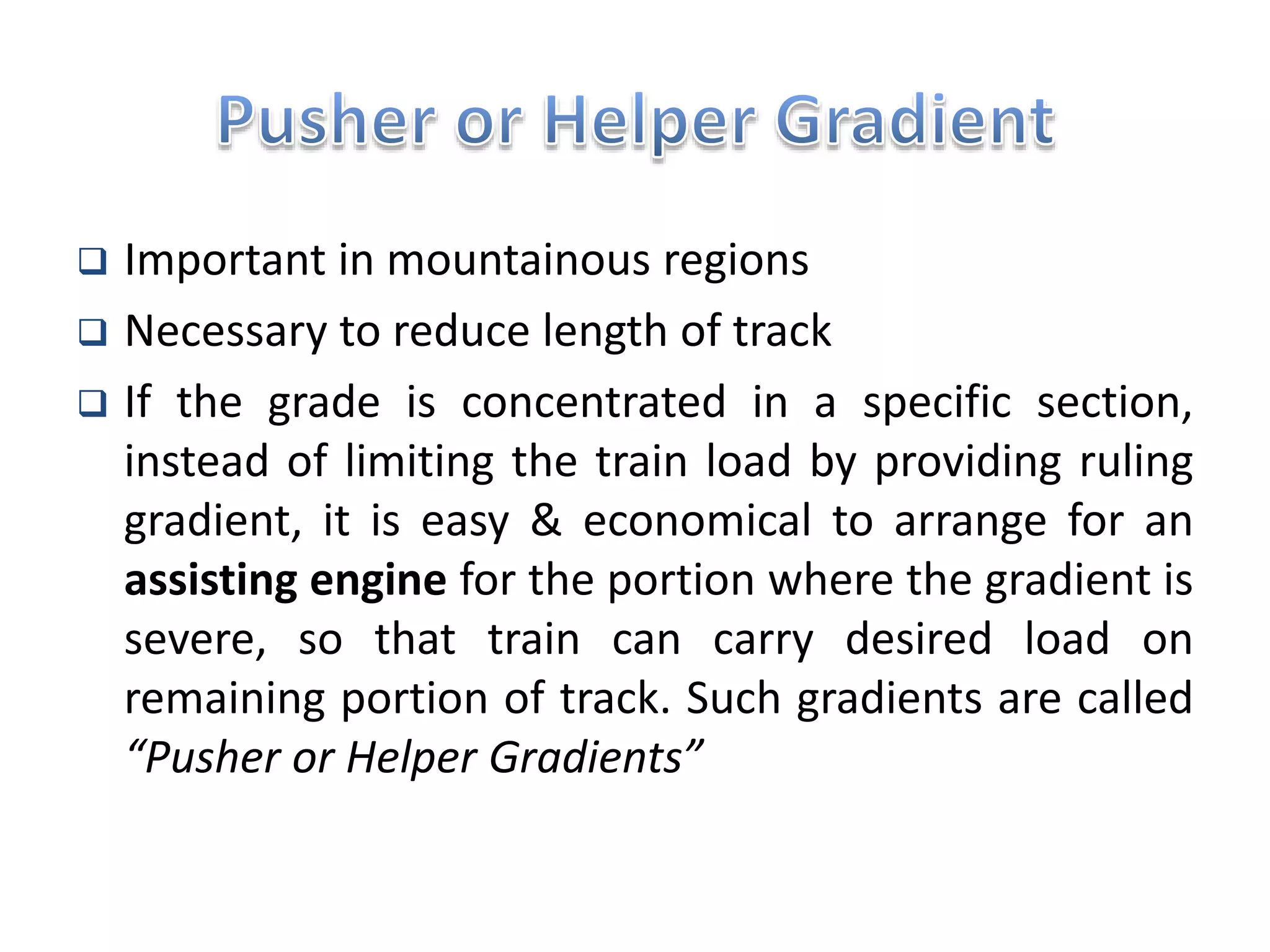
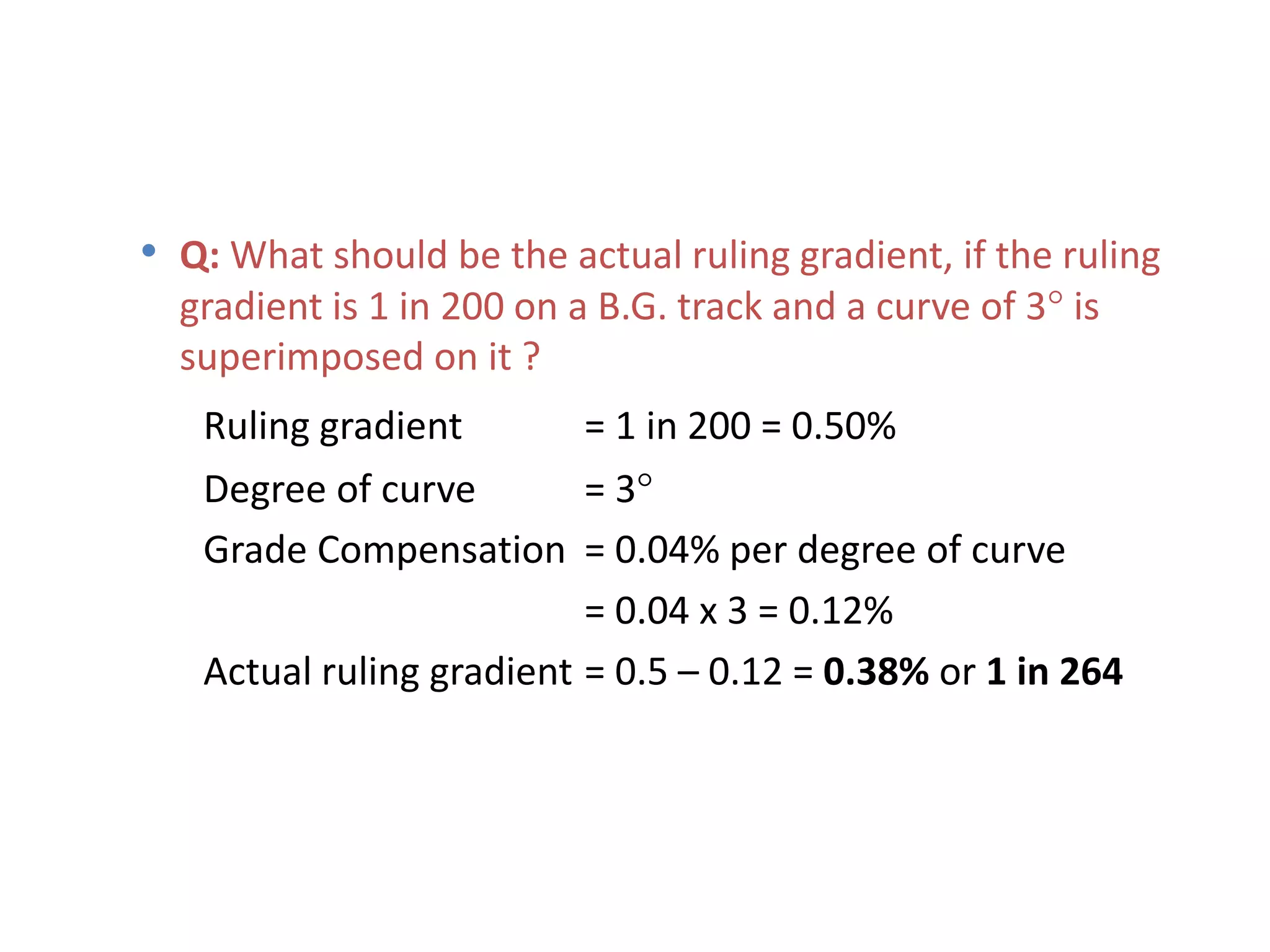
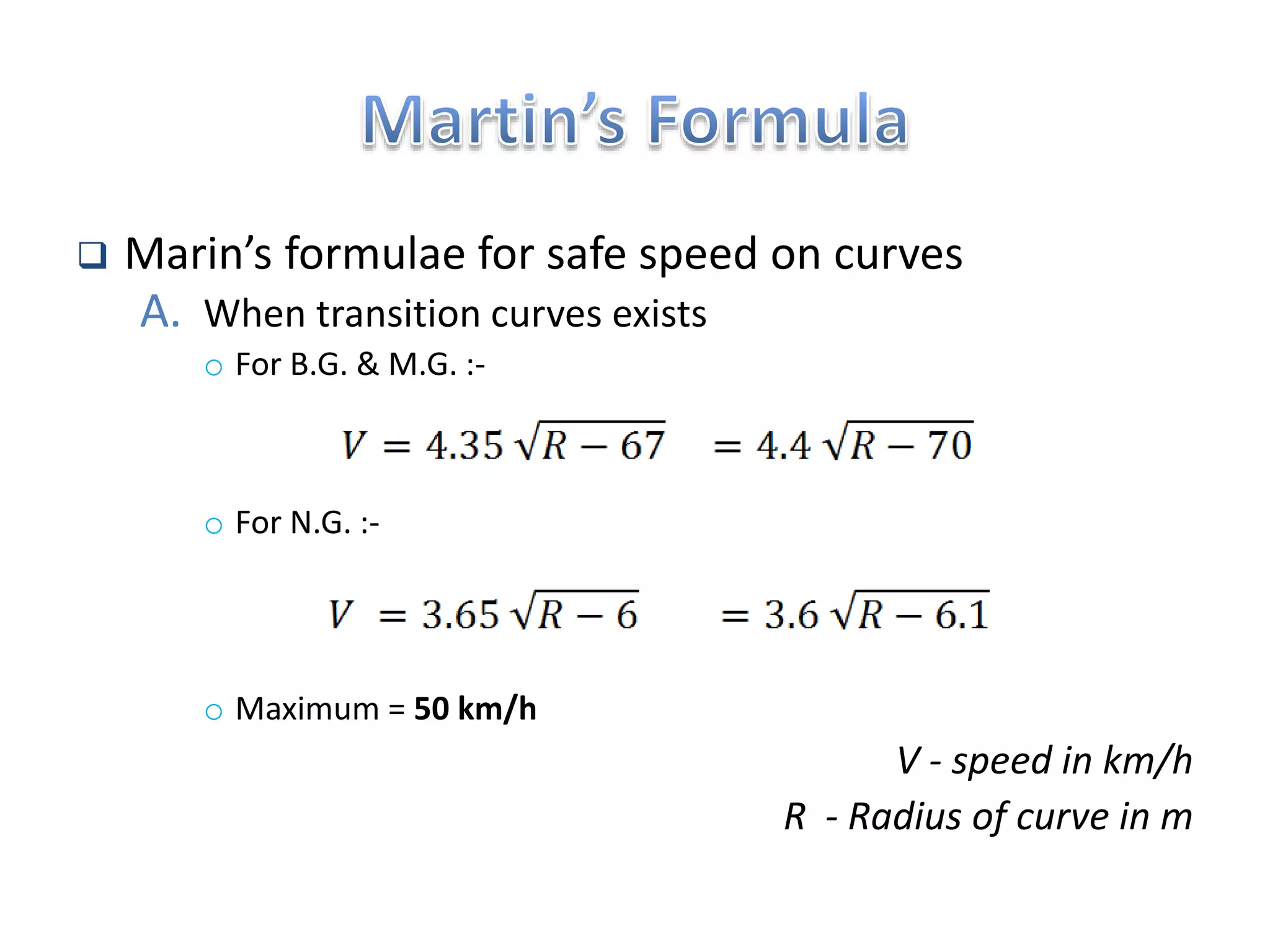
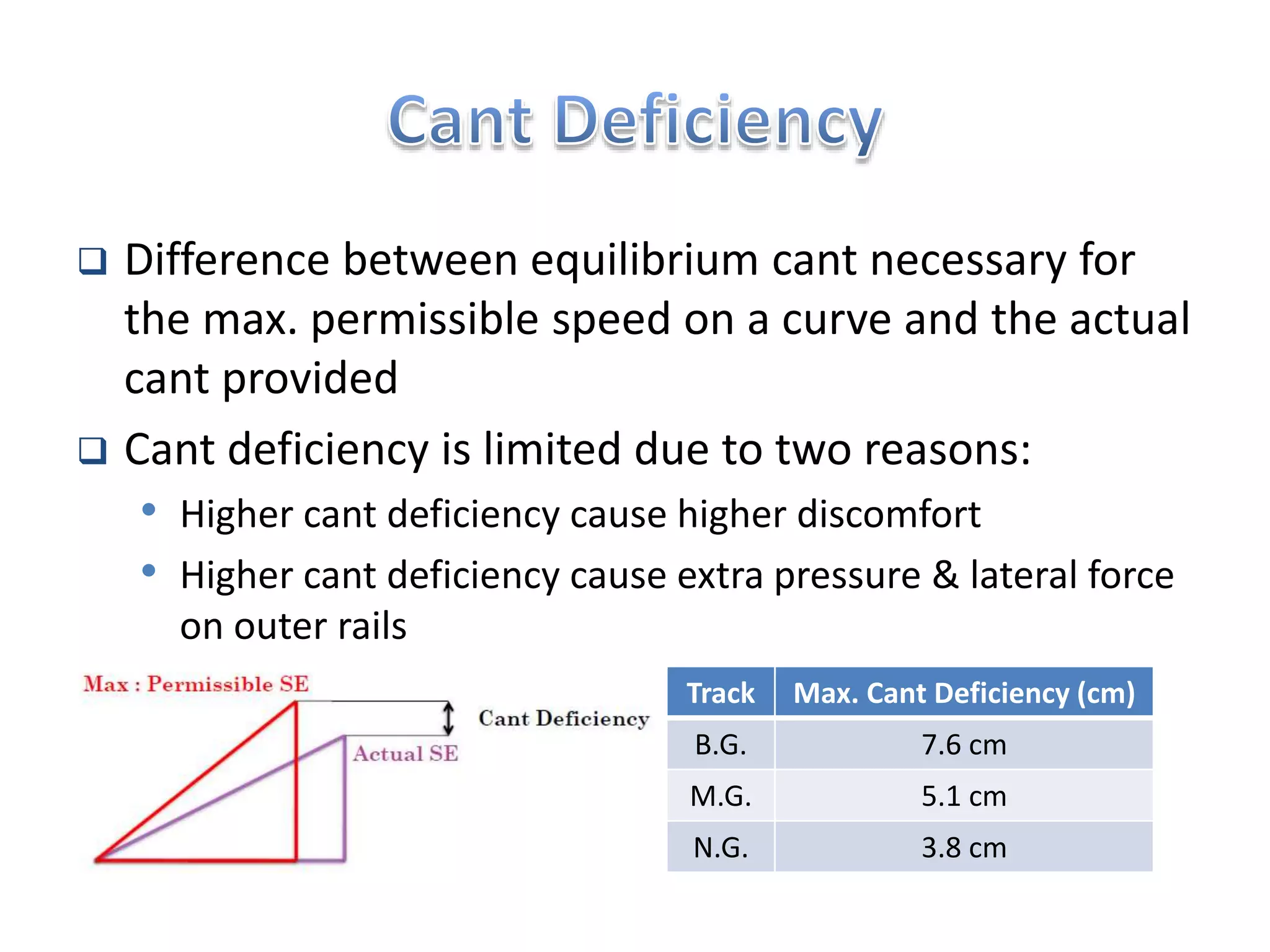
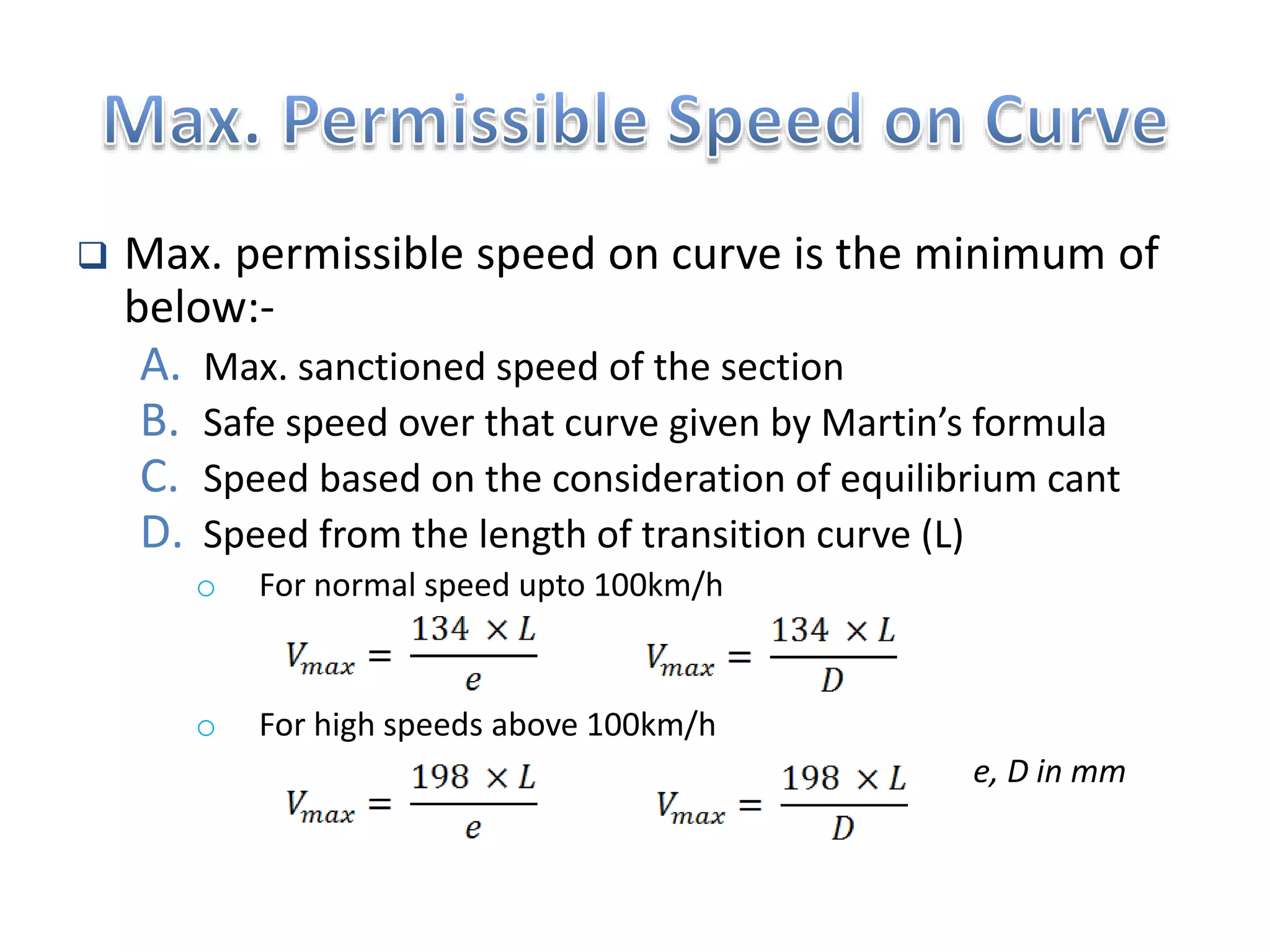
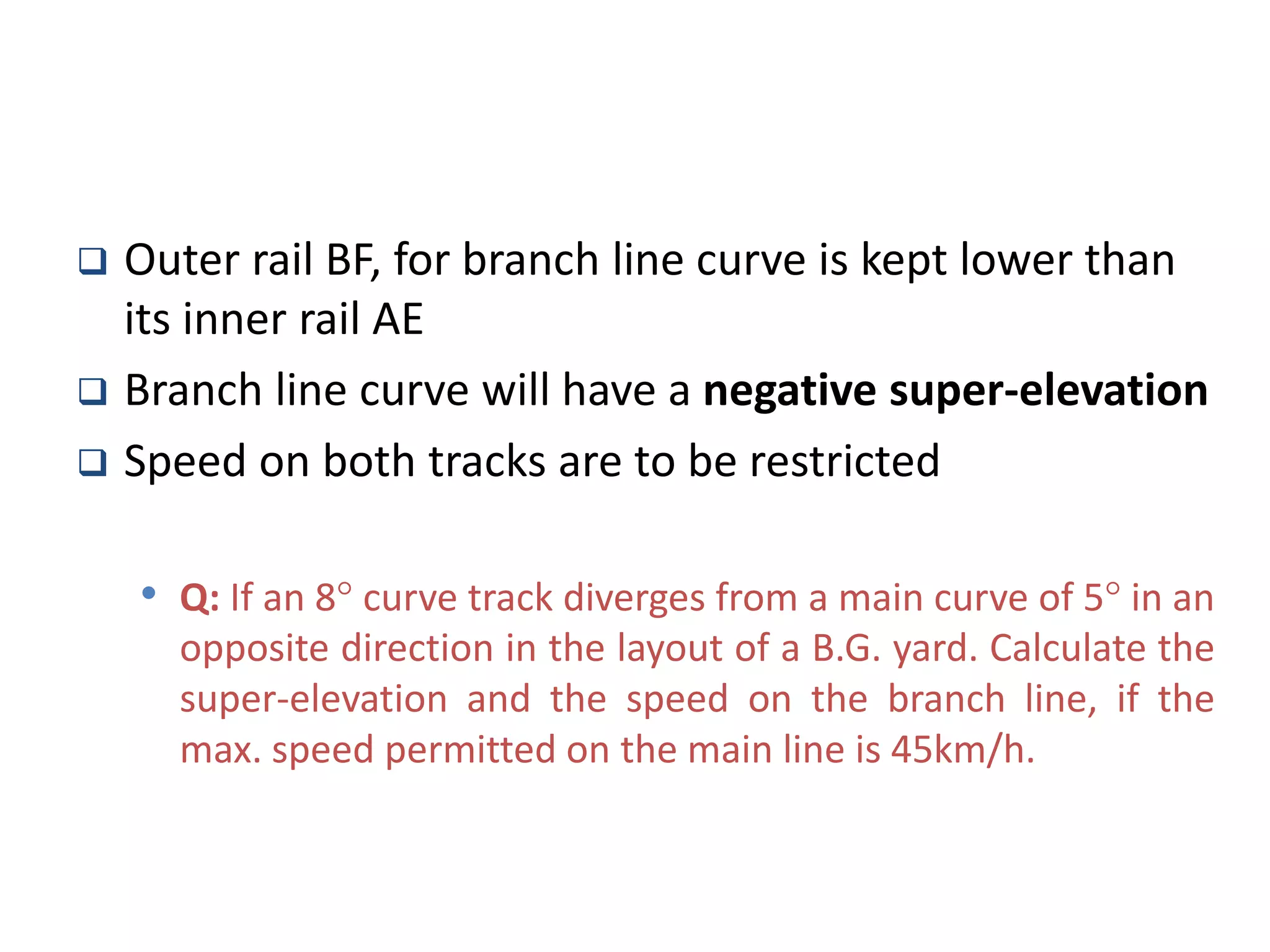
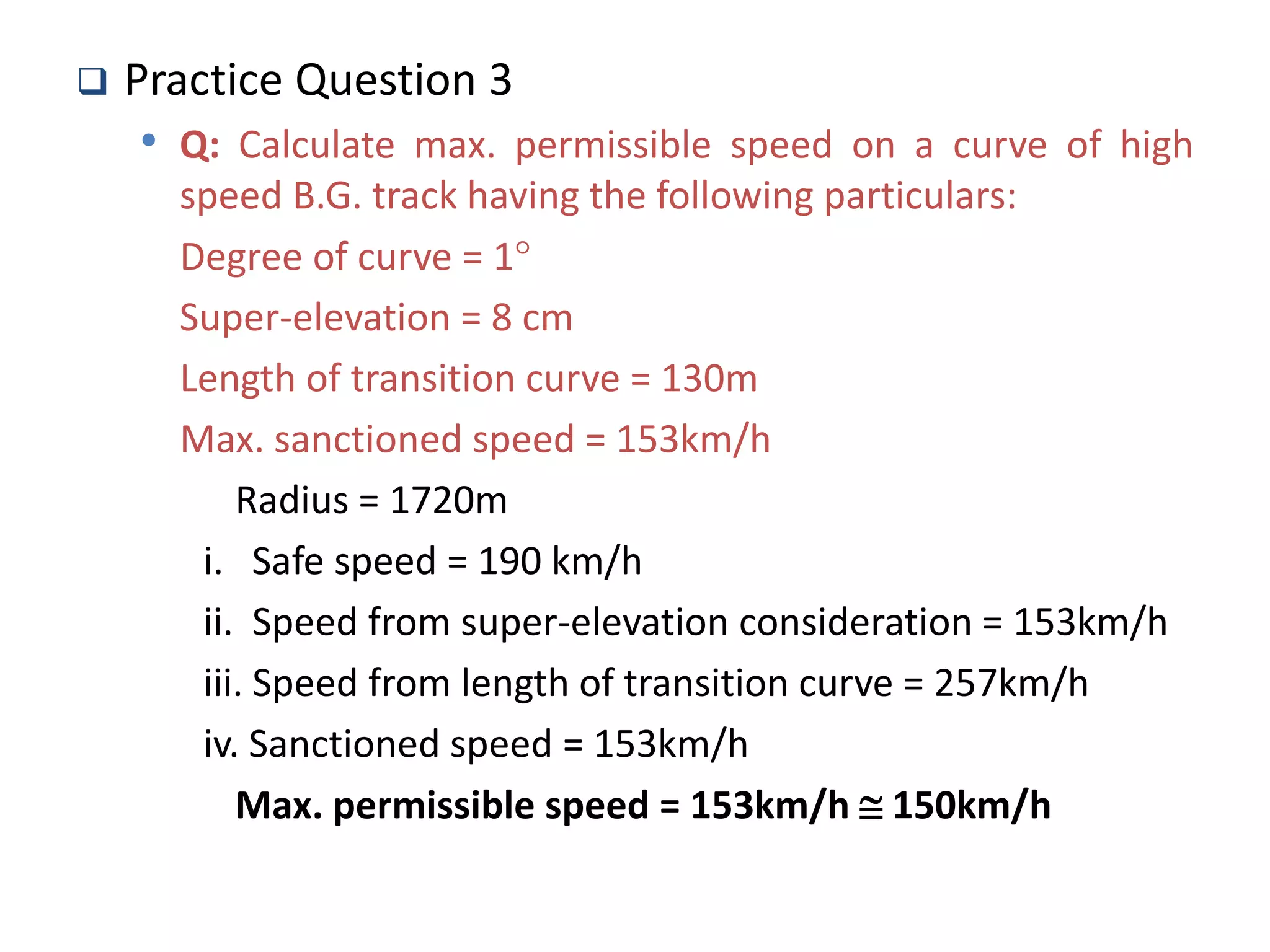
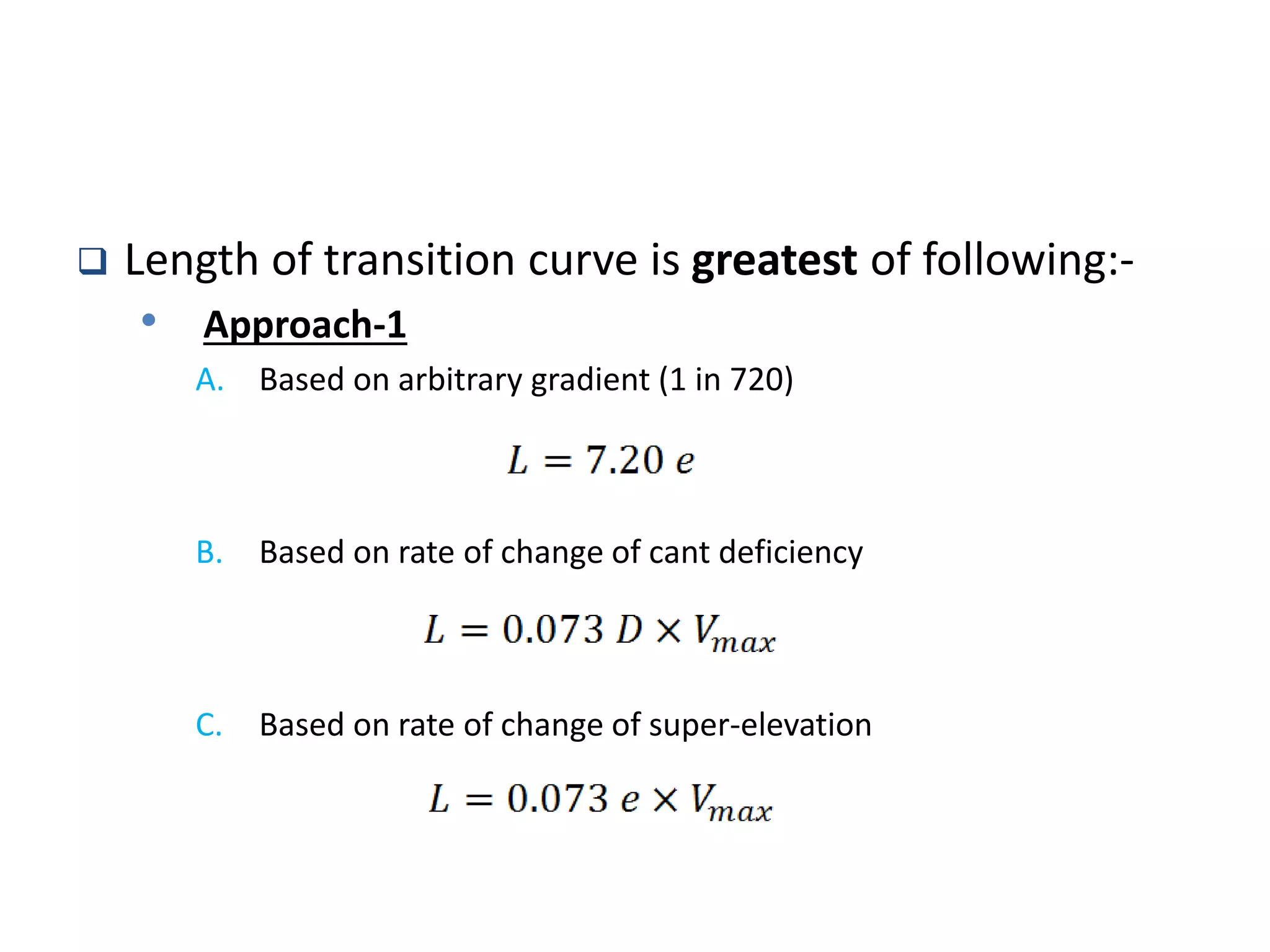
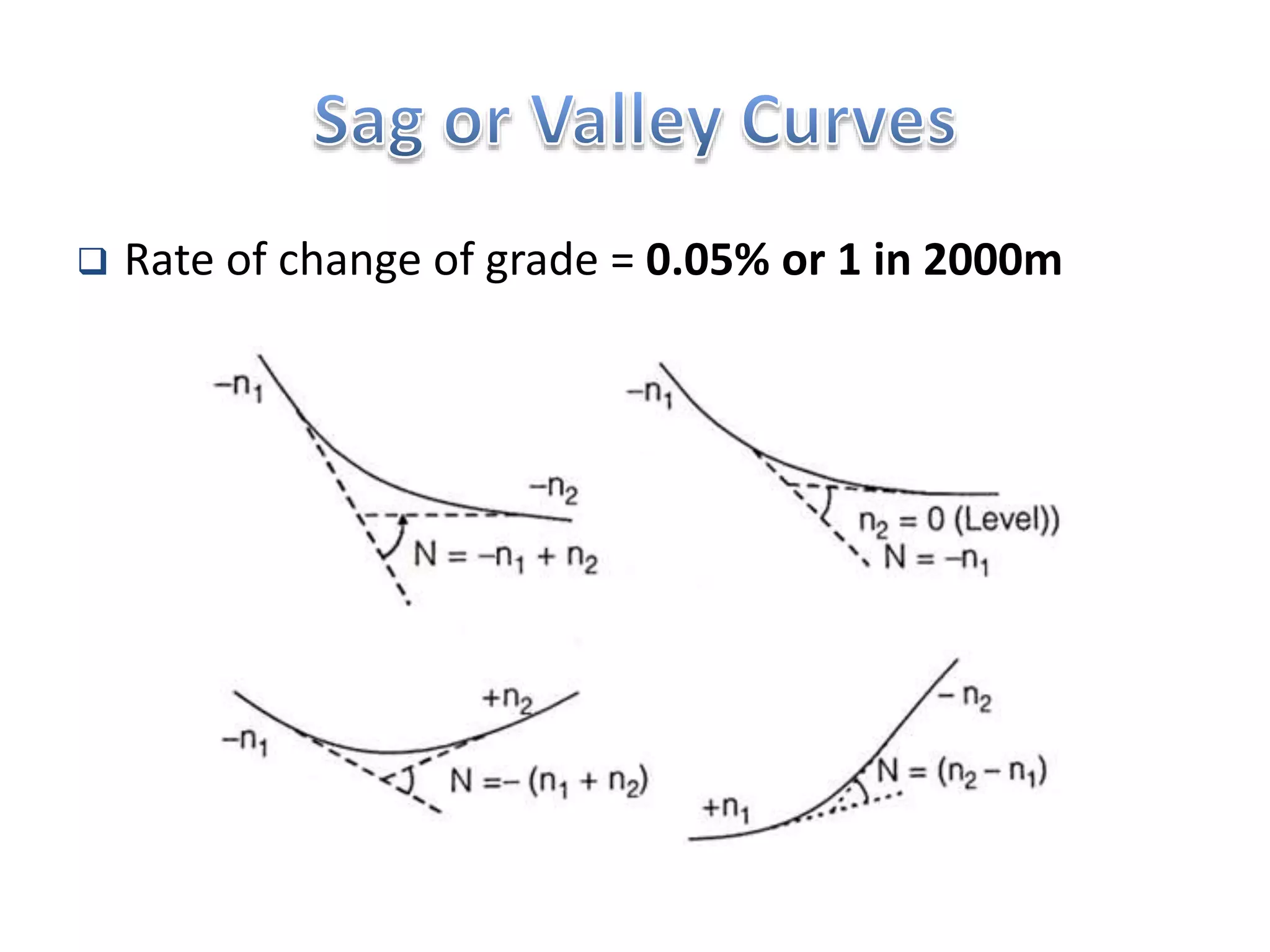
This document discusses various aspects of railway track design including gradients, horizontal and vertical curves, super-elevation, and transition curves. It provides formulas for calculating ruling gradient, super-elevation, safe speeds on curves, and other key design elements. Track must be designed to suit the loads and speeds of trains based on safety and economic standards. Proper gradient, curvature, and super-elevation are necessary for smooth train operation.































![10 Geometric Design of Railway Track [Horizontal Alignment] (Railway Engineer...](https://cdn.slidesharecdn.com/ss_thumbnails/geometricdesignofrailwaytrack-i-200415171932-thumbnail.jpg?width=640&height=640&fit=bounds)



















































