Downloaded 18 times
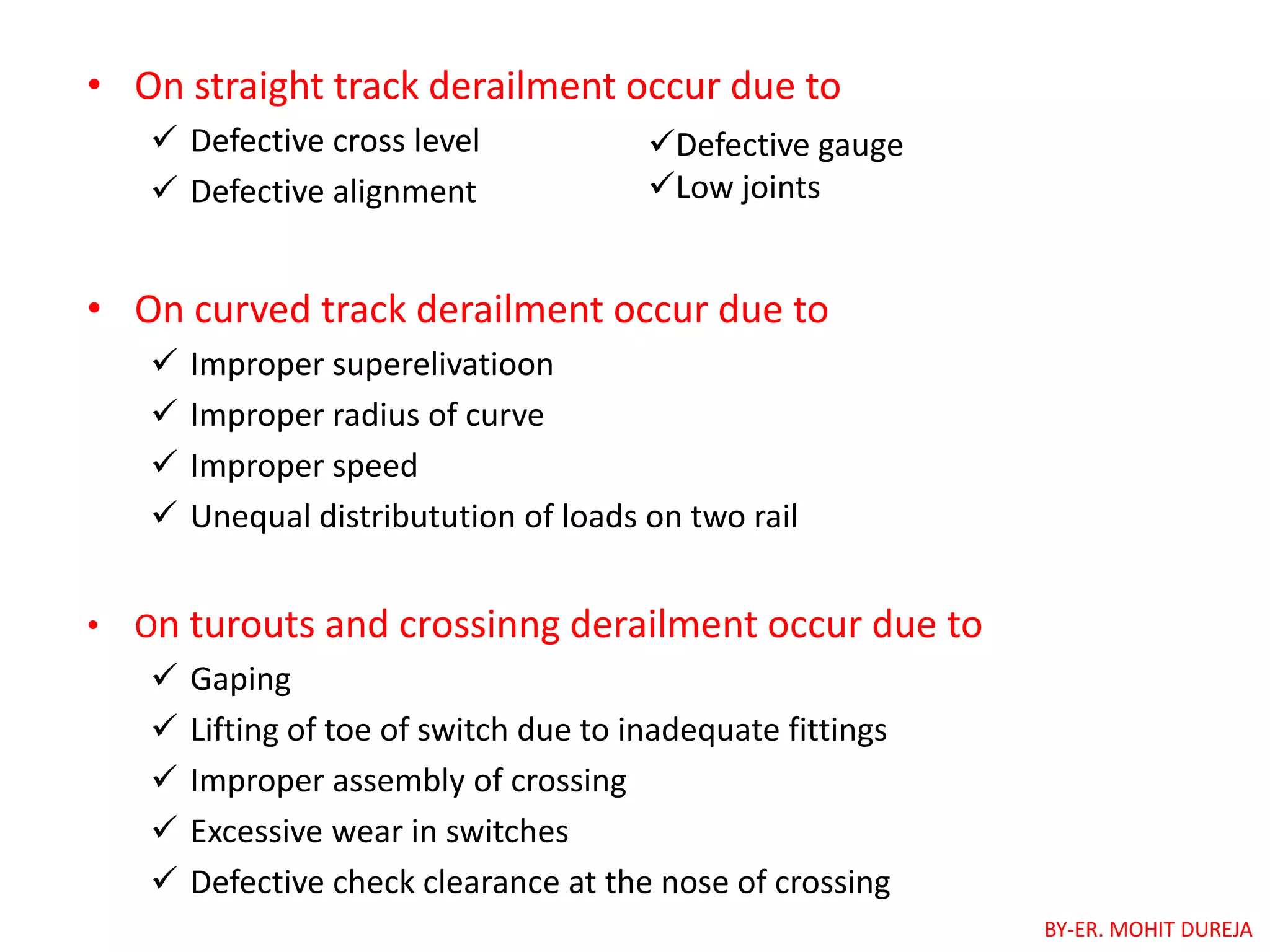
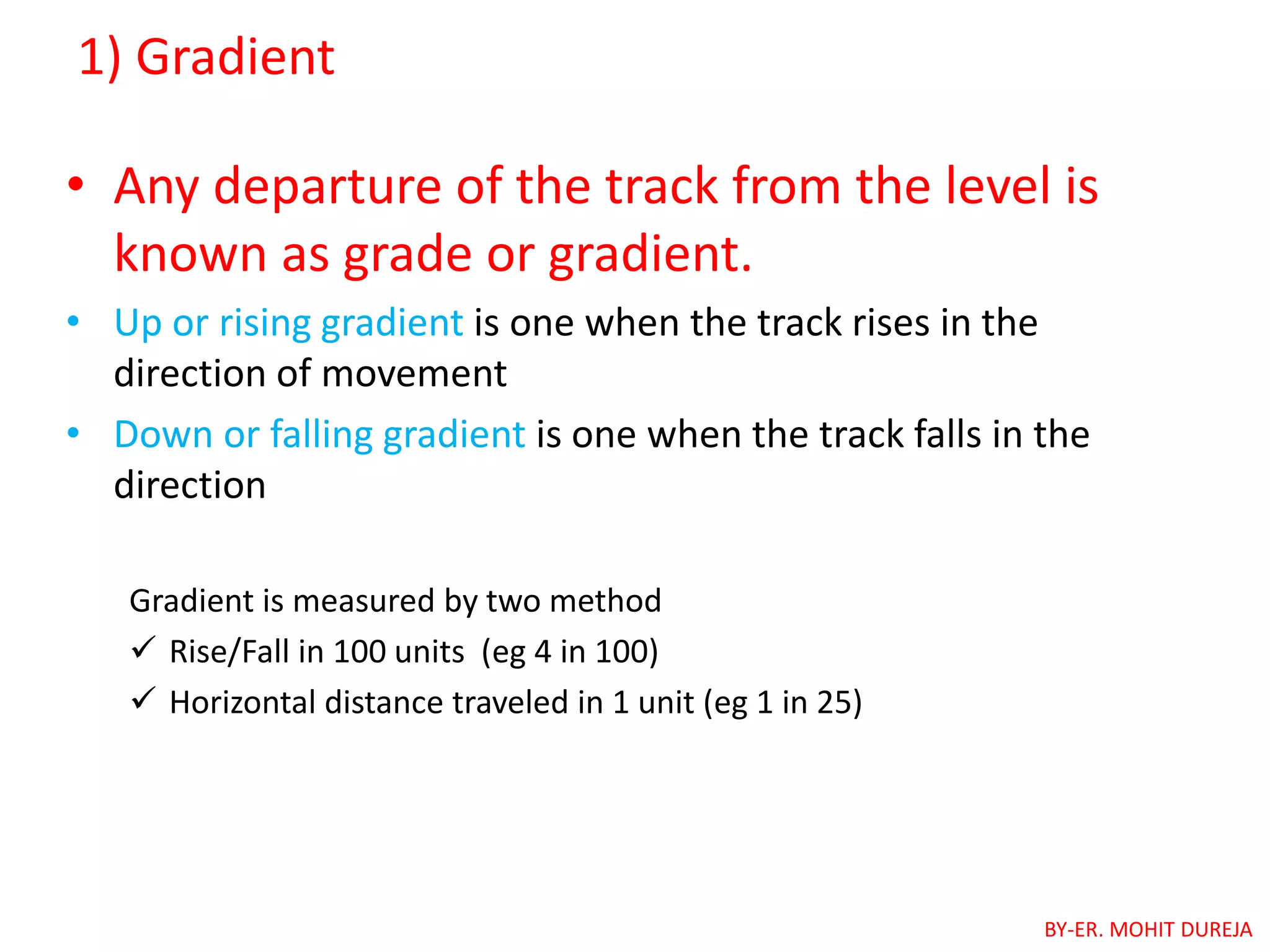
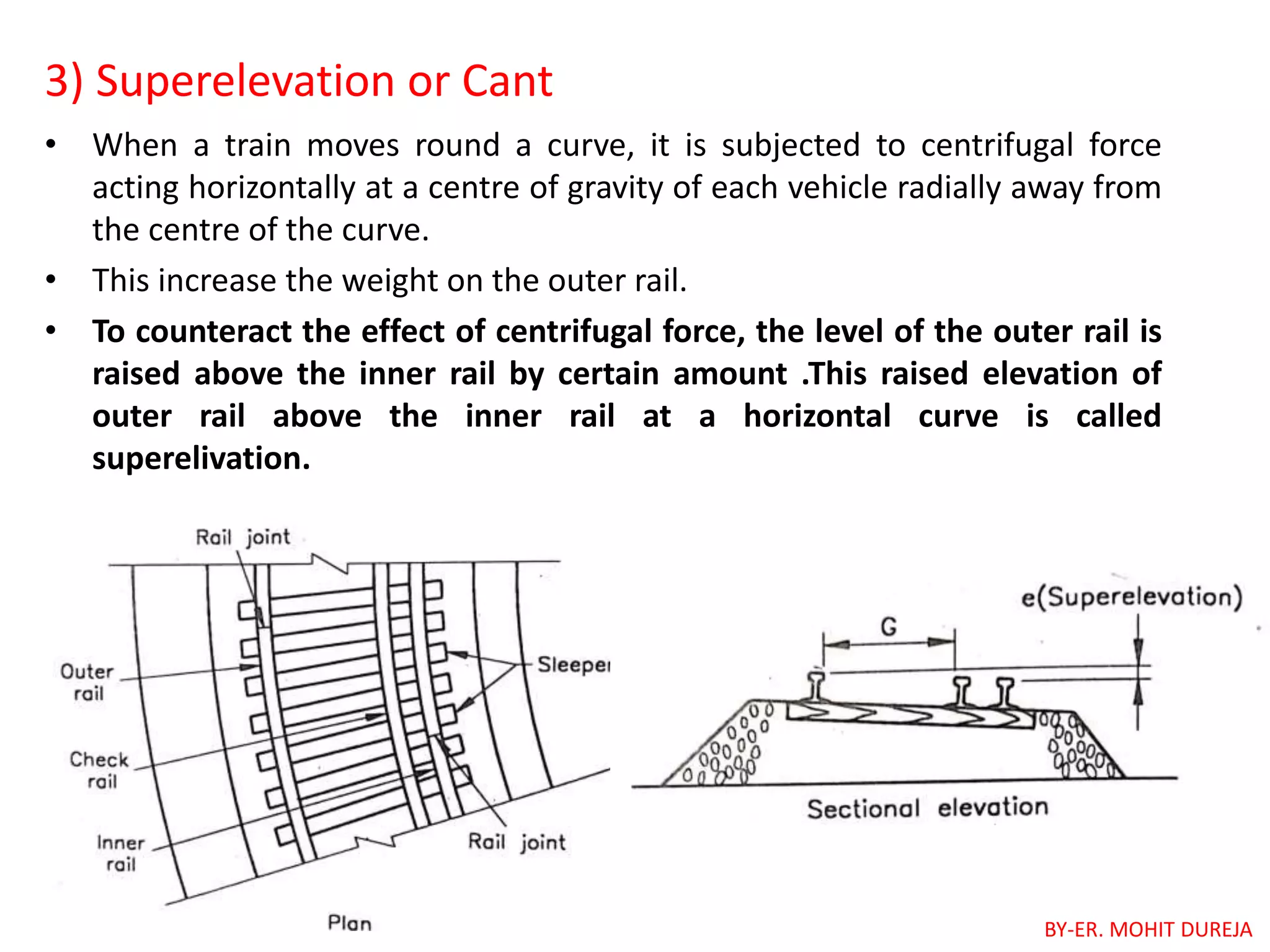
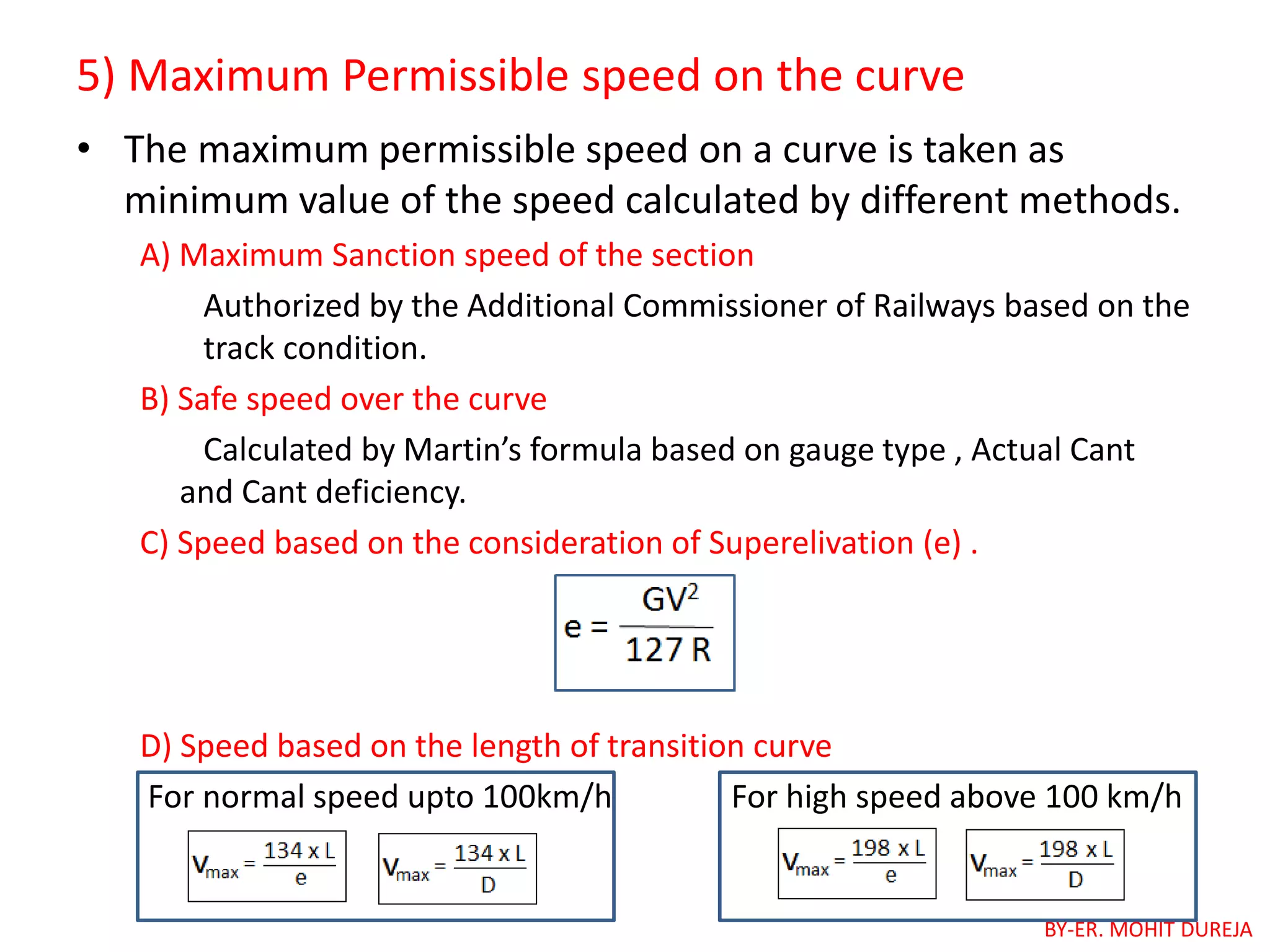
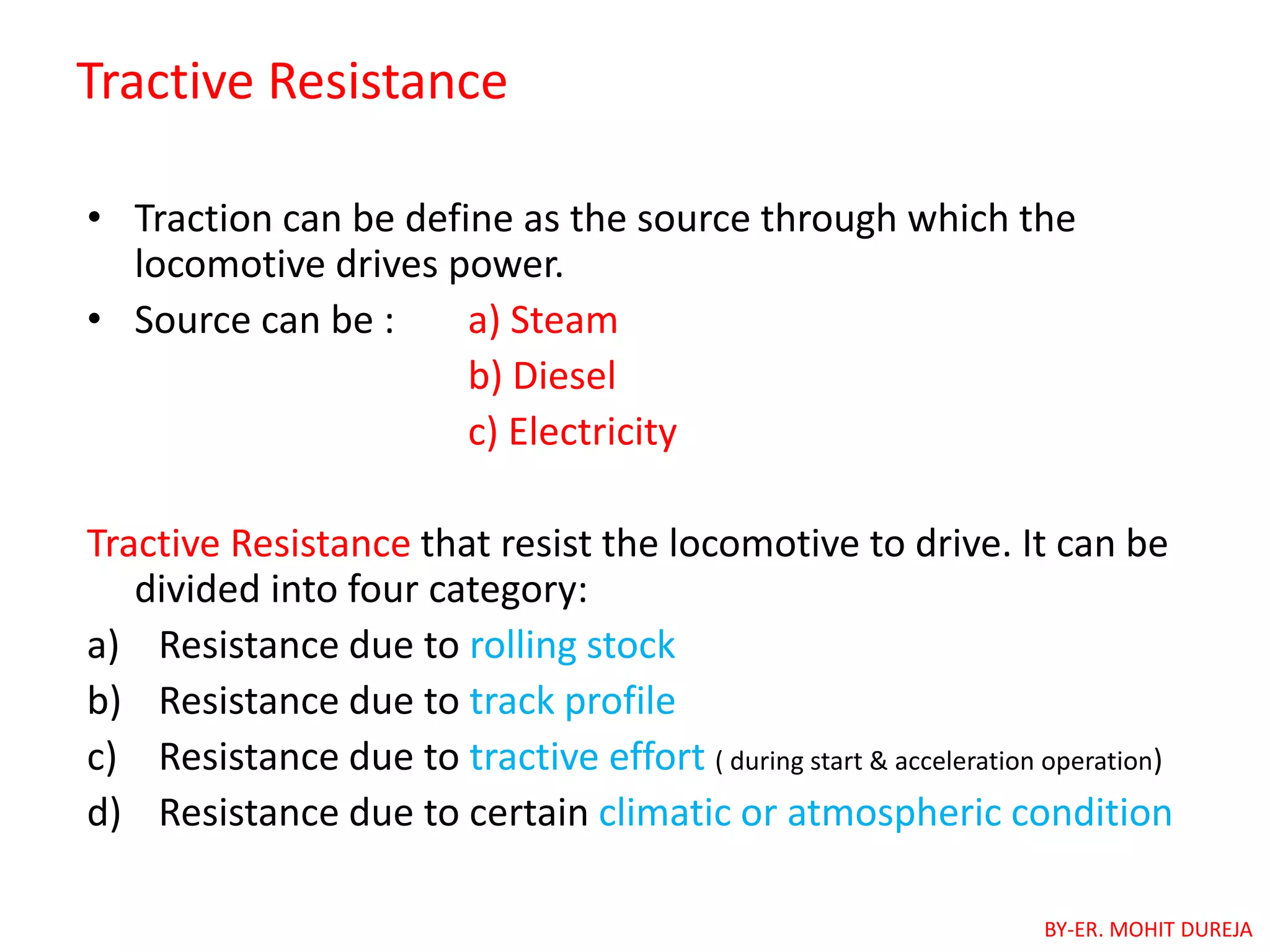
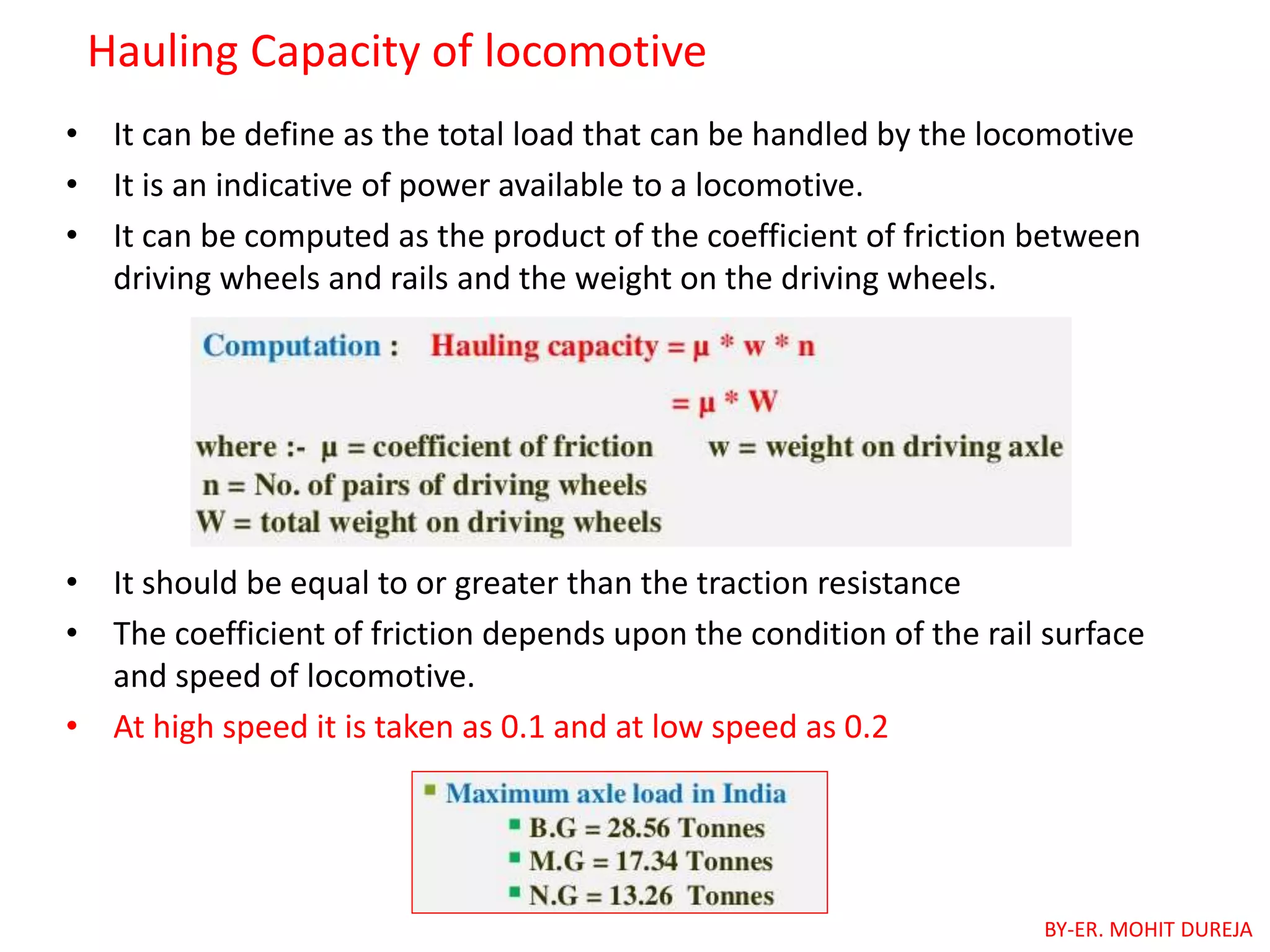

The document discusses the geometric design of railway tracks, emphasizing the importance of proper design to prevent derailments caused by various track and operational defects. It details types of gradients, including ruling, momentum, and pusher gradients, as well as factors such as super elevation and cant that influence train speed and safety on curves. Additionally, it covers aspects of tractive resistance and the hauling capacity of locomotives necessary for efficient rail operations.






















![10 Geometric Design of Railway Track [Horizontal Alignment] (Railway Engineer...](https://cdn.slidesharecdn.com/ss_thumbnails/geometricdesignofrailwaytrack-i-200415171932-thumbnail.jpg?width=640&height=640&fit=bounds)


















































