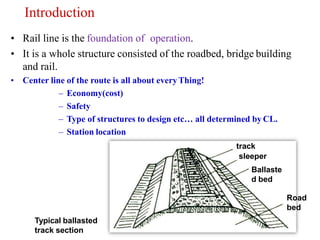
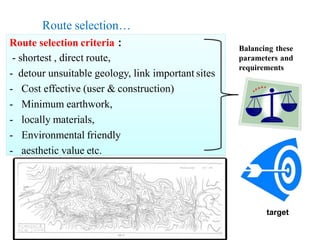
This document discusses various aspects of rail line design including track geometry, alignment, and cant. It defines key terms like plane section, longitudinal section, horizontal alignment, vertical alignment, and cant. It describes different types of tracks like straight tracks, circular curves, and transition curves. It explains how curve radius, superelevation (cant), cant transitions, and cant deficiency impact train speed and safety. Maximum speeds are determined based on factors like curve radius, cant, lateral acceleration limits, and vehicle specifications.

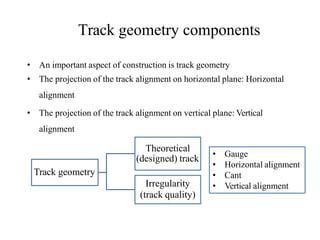






![Circular curve
• The minimum radius is determined by the speed
– 30-60 m for tramways/metro lines
‐ 60-90 m on industrial railways
‐ Line speed for tramways/metro varies between 40 to 80 km/h
Recommended and minimum horizontal curve radius for v > 200 km/h:
Speed [km/h] 200 250 280 300 330 350
Recommended radius [m] 3200 5000 6300 7200 8700 9800
Minimum radius [m] 1888 2950 3700 4248 5140 5782
Note: use integer values for radius and not
larger than 99999 m](https://image.slidesharecdn.com/chapter2trackgeometry-230222064737-d2c3caf7/85/Chapter-2-Track-Geometry-pptx-14-320.jpg)





























![11 Geometric Design of Railway Track [Vertical Alignment] (Railway Engineerin...](https://cdn.slidesharecdn.com/ss_thumbnails/geometricdesignofrailwaytrack-ii-200415172410-thumbnail.jpg?width=640&height=640&fit=bounds)


![10 Geometric Design of Railway Track [Horizontal Alignment] (Railway Engineer...](https://cdn.slidesharecdn.com/ss_thumbnails/geometricdesignofrailwaytrack-i-200415171932-thumbnail.jpg?width=640&height=640&fit=bounds)