The document discusses different types of controllers:
1) On-Off, P, PI, PD, and PID controllers. On-Off controllers have only two modes while P controllers use proportional gain. PI controllers add integral action to eliminate steady-state error. PD controllers use derivative action and PID controllers combine all three actions.
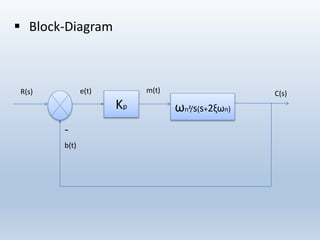
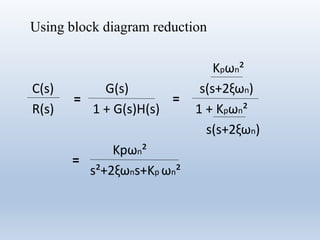
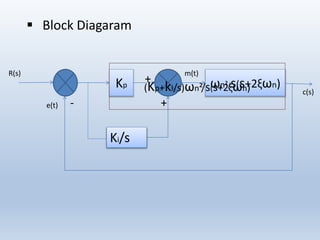
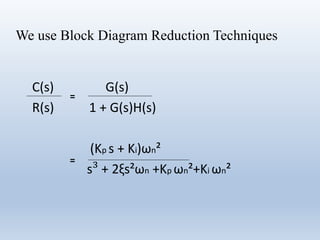
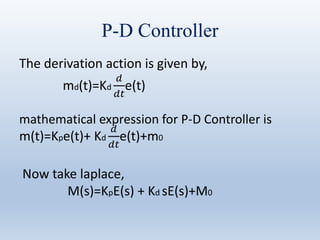
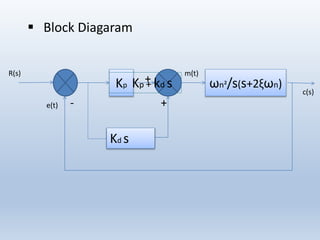
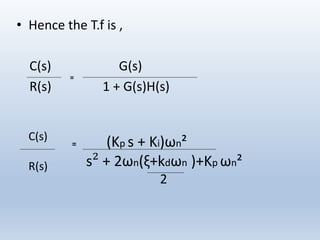
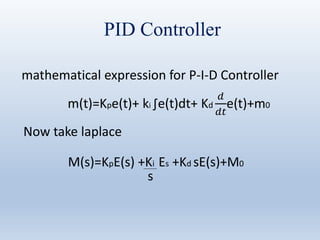
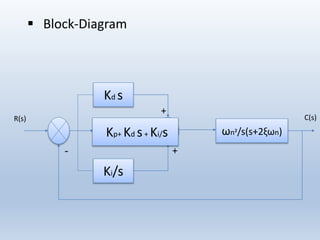
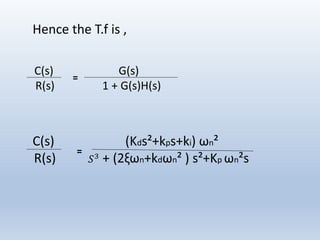
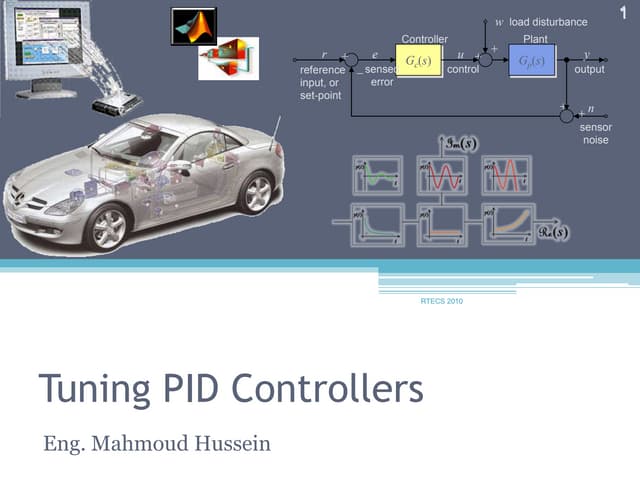
2) Block diagrams and transfer functions are presented to show how each controller type is modeled and its effect on the closed loop system. The proportional, integral, and derivative gains (Kp, Ki, Kd) determine each controller's effect.
3) PID controllers combine proportional, integral and derivative actions and are commonly used in industrial control systems due to their robust performance.