The document discusses various types of industrial controllers. It describes discrete controllers that have only two positions, multistep controllers that have more than two positions, and continuous controllers that automatically adjust their output based on the error between the process variable and set point. The document also discusses proportional, PI, PD, and PID controller algorithms as well as single loop, cascade, and feedforward control configurations. Finally, it provides examples of specific controllers like pneumatic, electronic, and programmable logic controllers.
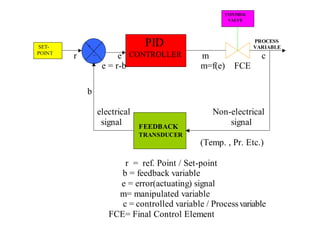
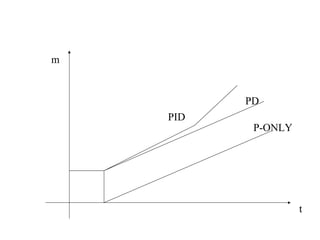
![PID CONTROLLER
The additive combination of Prop. , Integral & Derivative
control actions is known as PID-control.
m= Kc*e + (Kc/Ti)*ƒe dt +(Kc*Td)*(de/dt) +M
m-M = Kc [1+(1/Ti*s)+Td*s] e
For a linear change of deviation : e = Et
m-M = Kc [1+ (1/Ti*s) +Td*s] Et
m-M = KcE (t+t²/2Ti+Td)](https://image.slidesharecdn.com/controllerppt-121107091200-phpapp02/85/Controller-ppt-18-320.jpg)