Download as PDF, PPTX
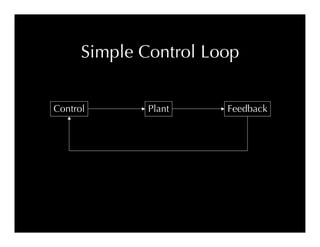
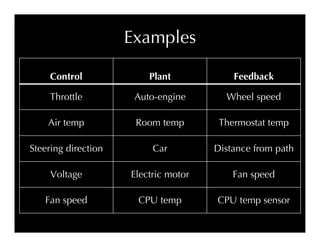
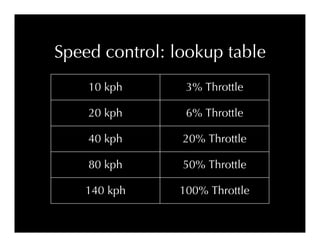
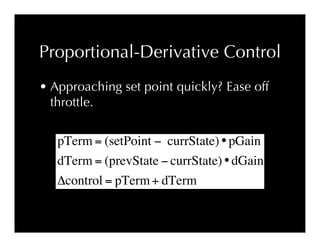
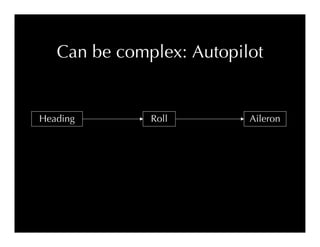
The document discusses the principles and techniques of proportional-integral-derivative (PID) control systems, highlighting their application in managing feedback loops for various parameters such as vehicle speed and temperature. It outlines how to tune PID gains for optimal performance, including the roles of proportional, integral, and derivative terms in responding to errors between the current state and set-point. Examples are provided to illustrate decision-making in throttle adjustments based on proximity to target values.