The document describes various controller modes including:
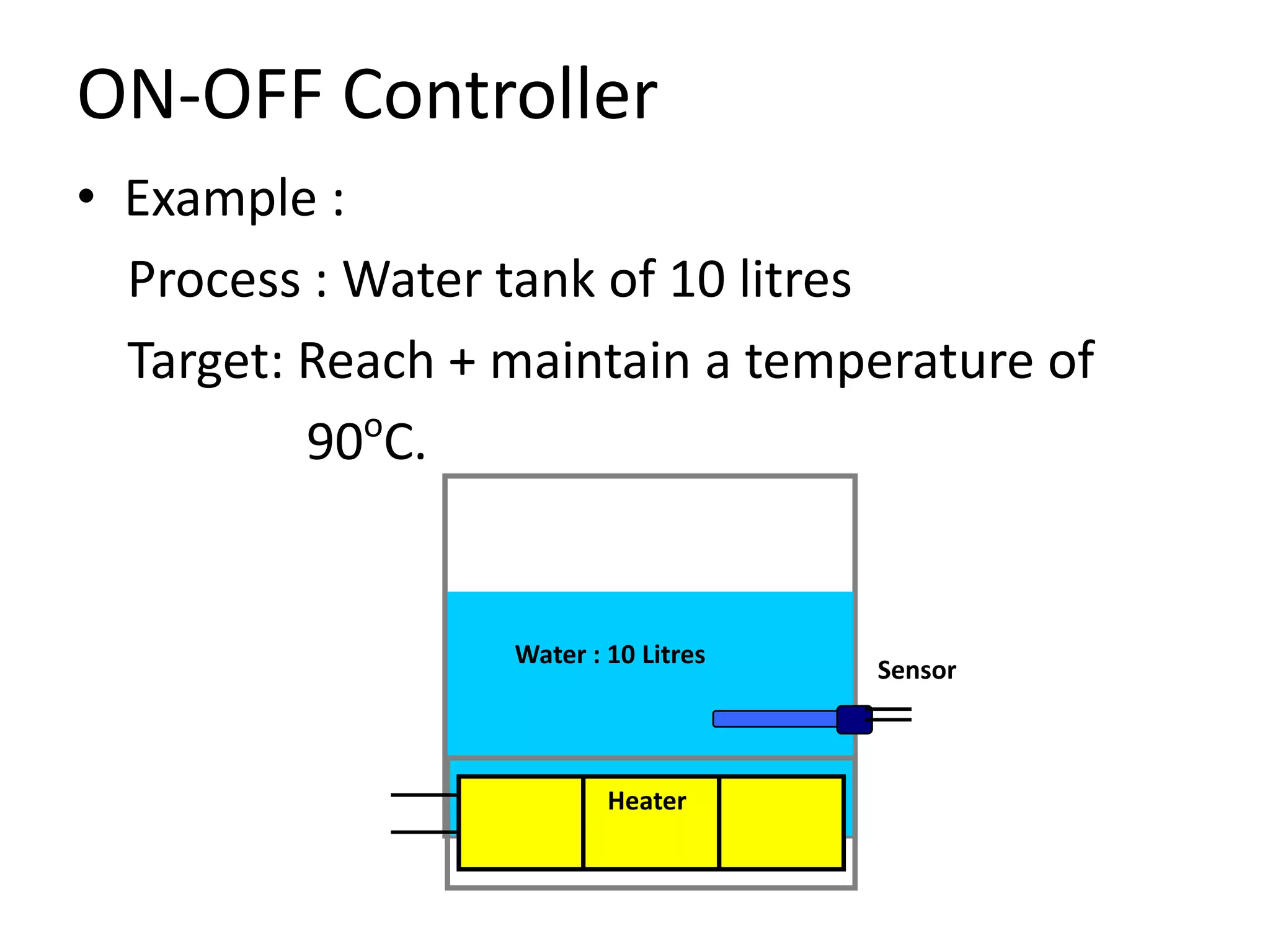
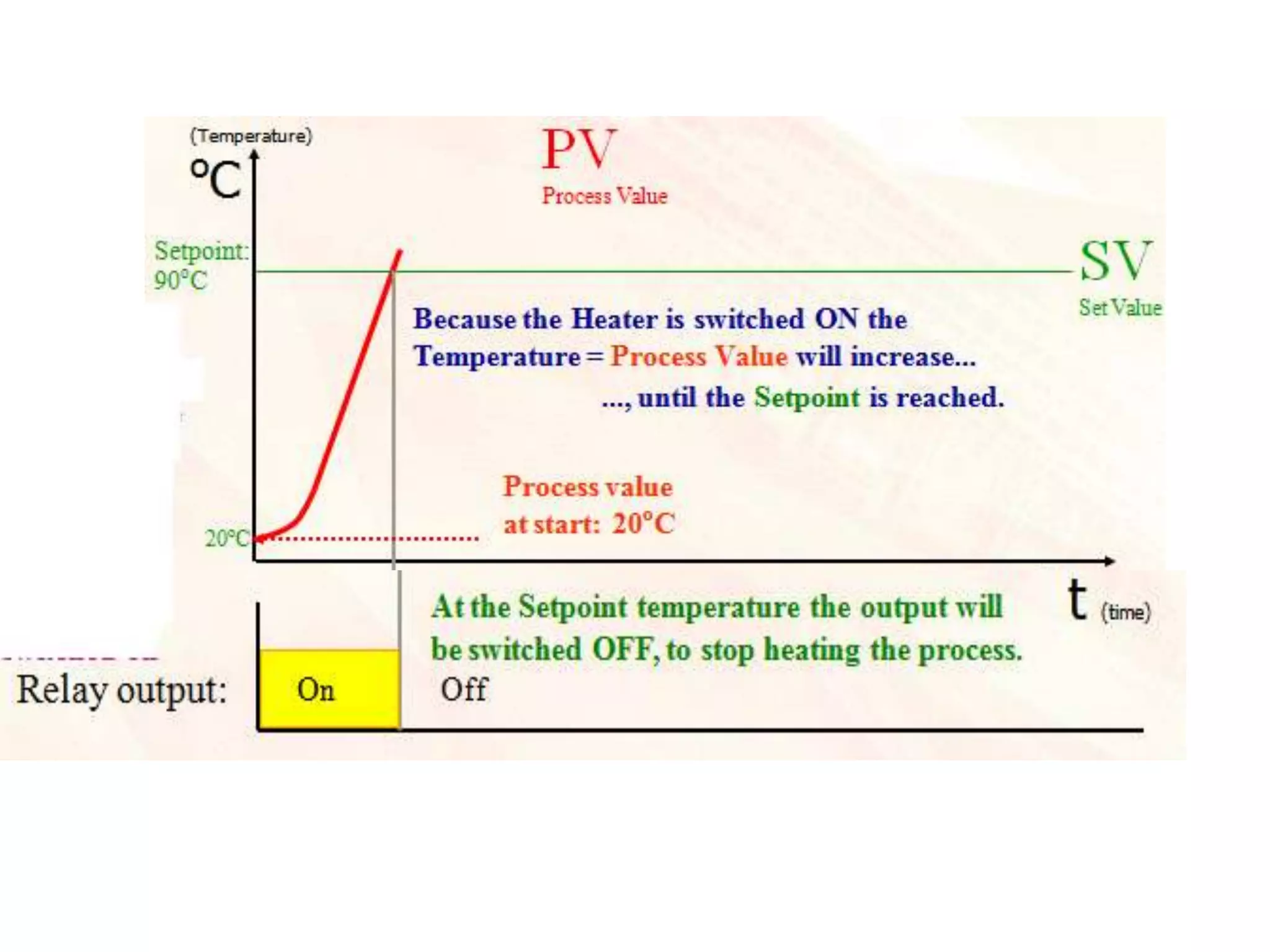
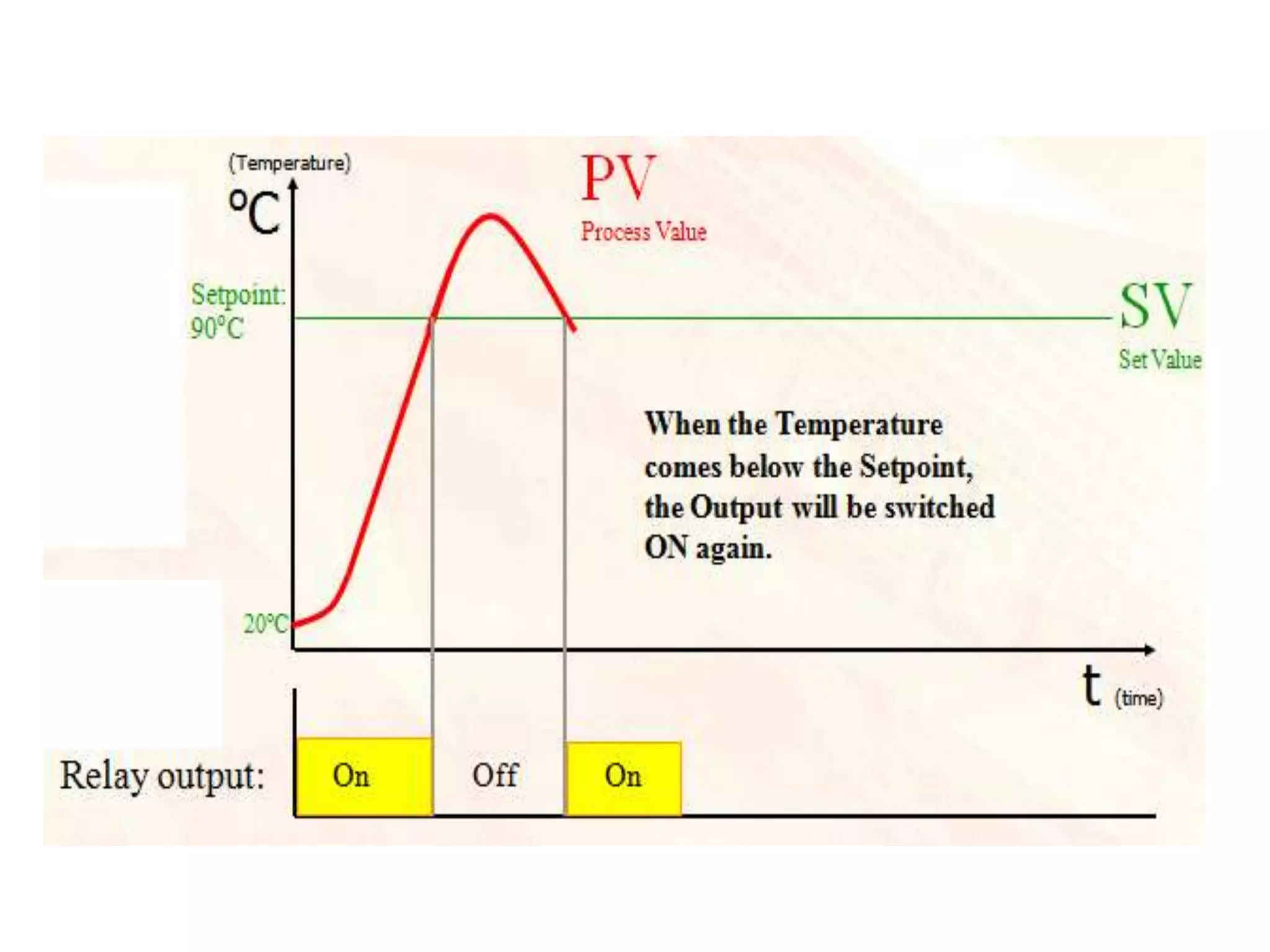
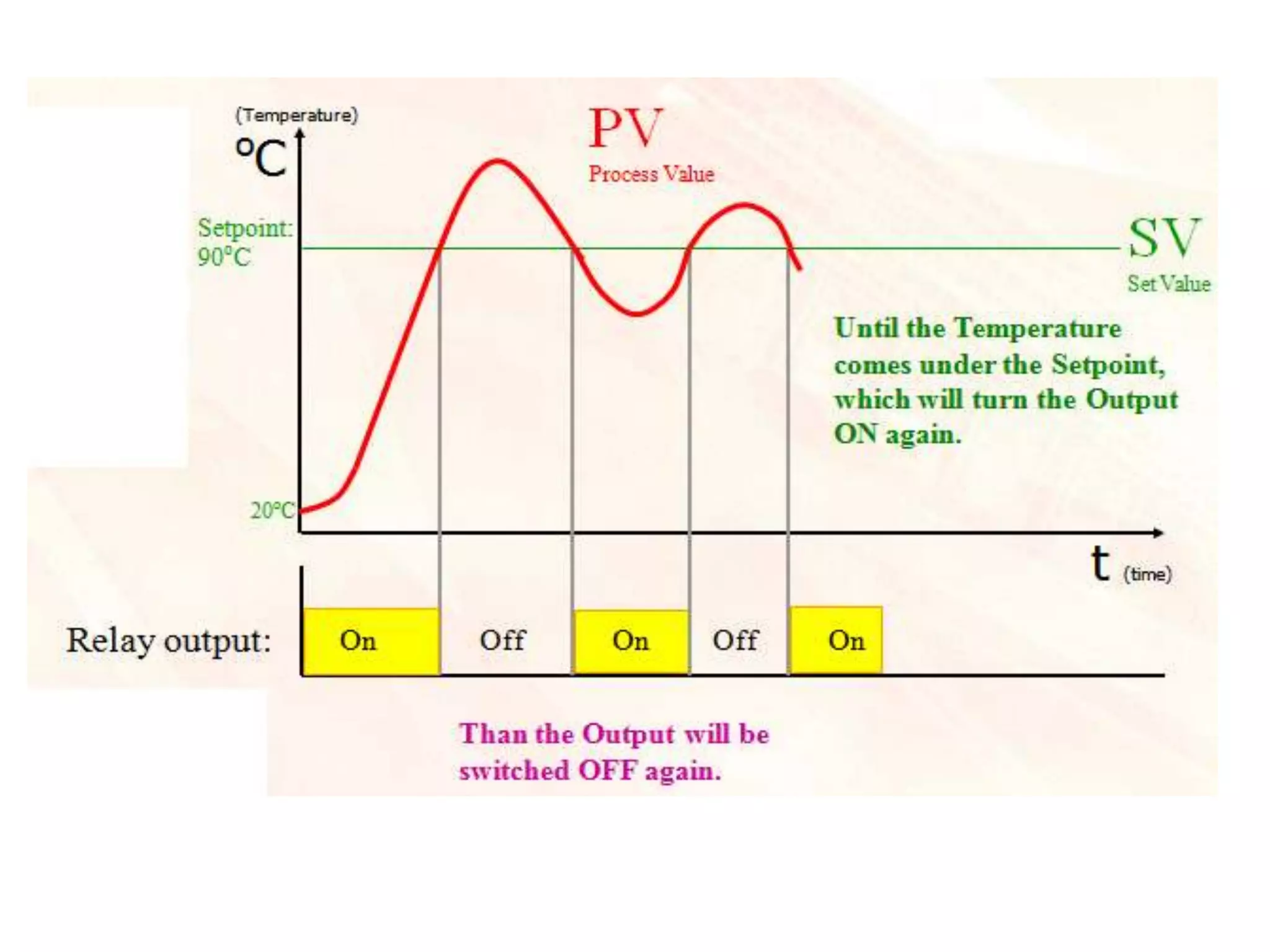
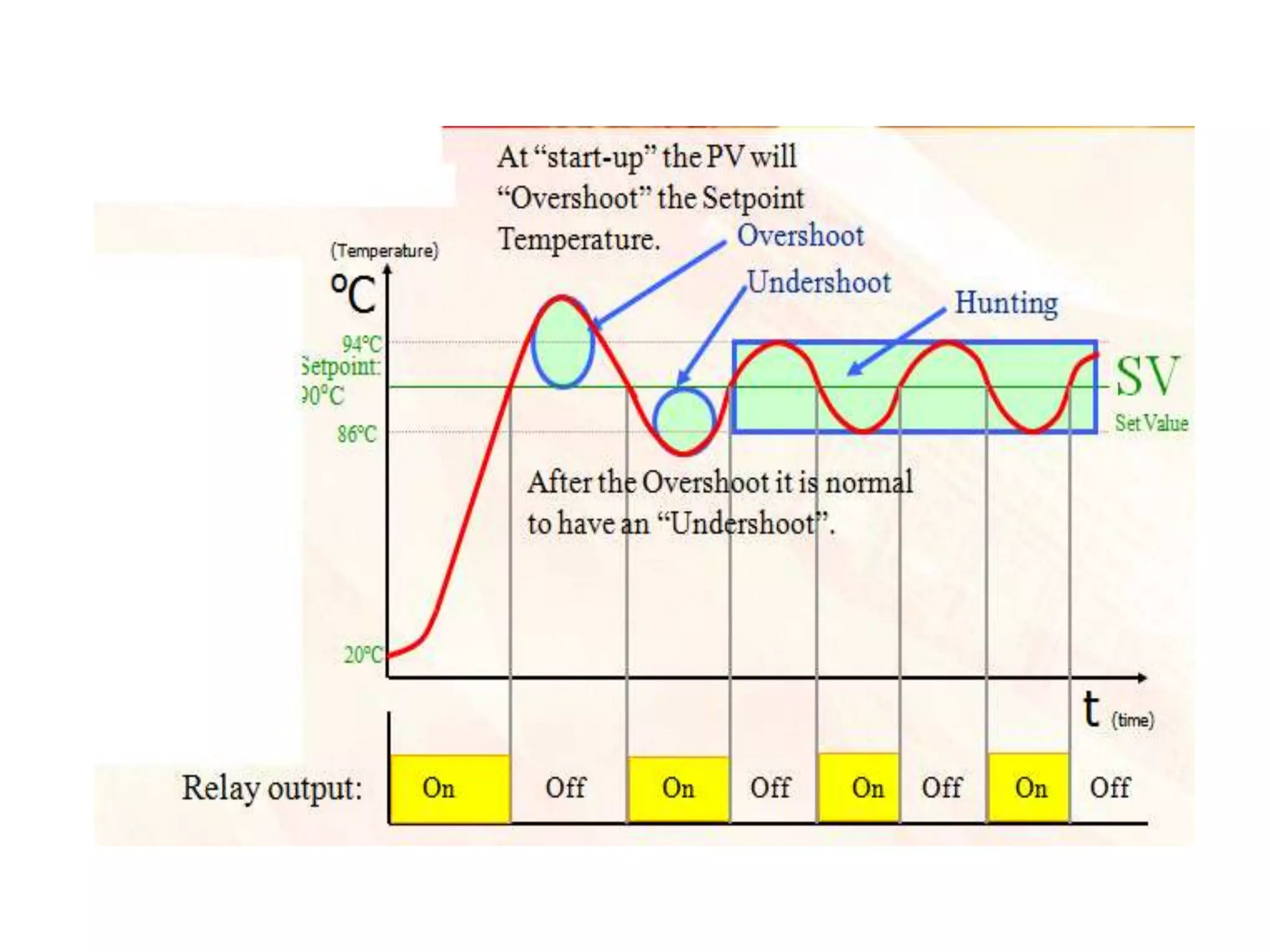
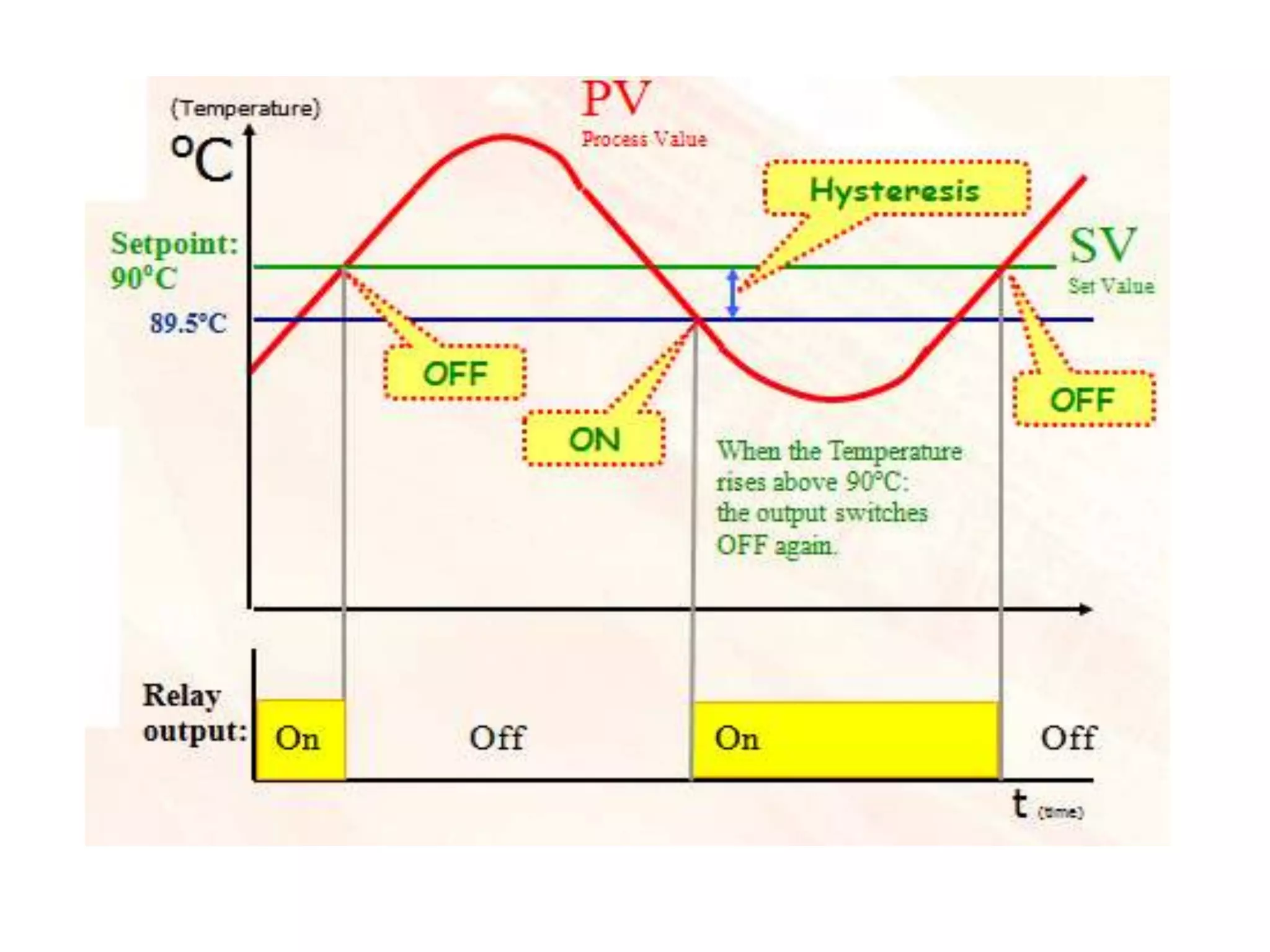
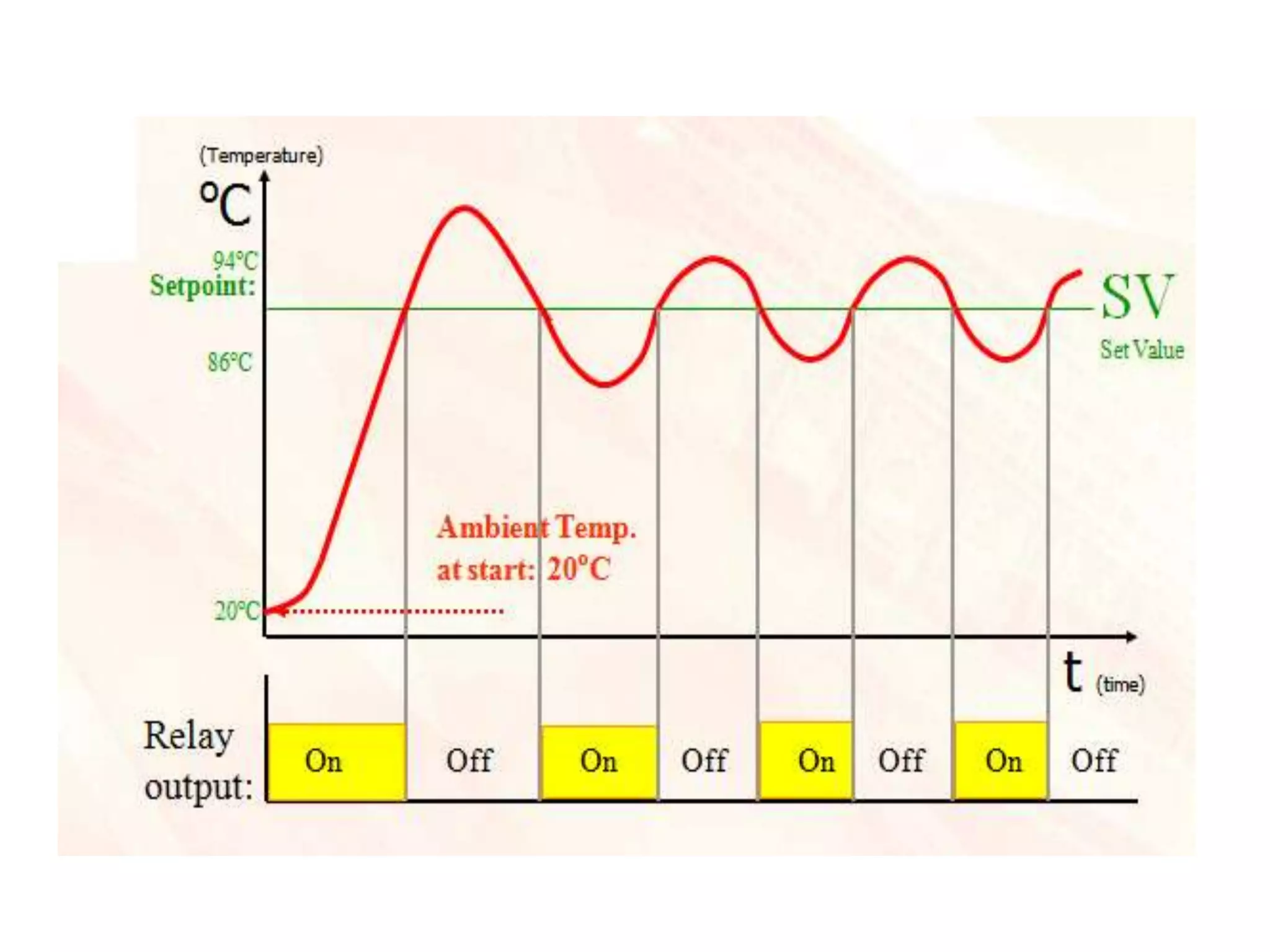
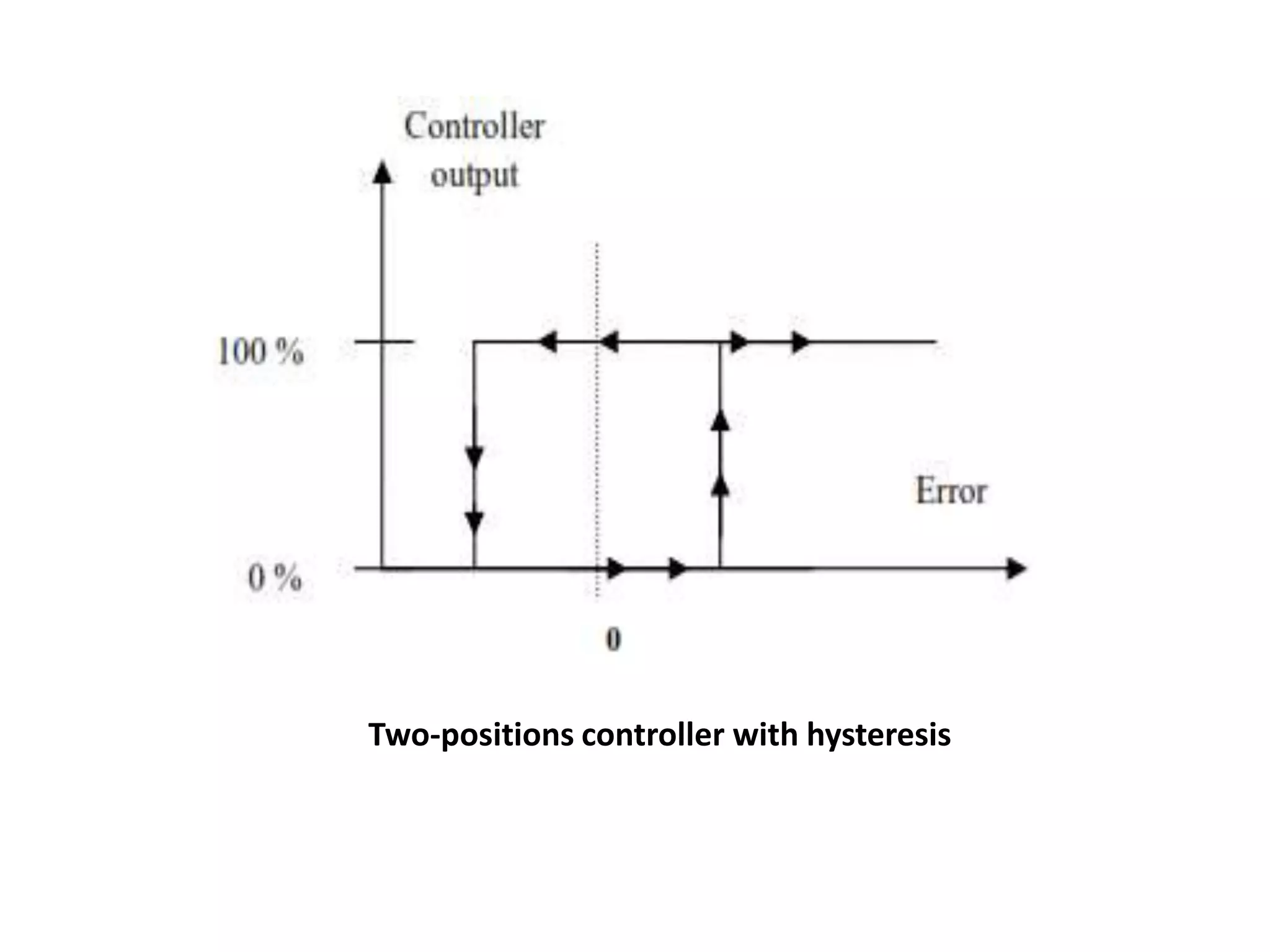
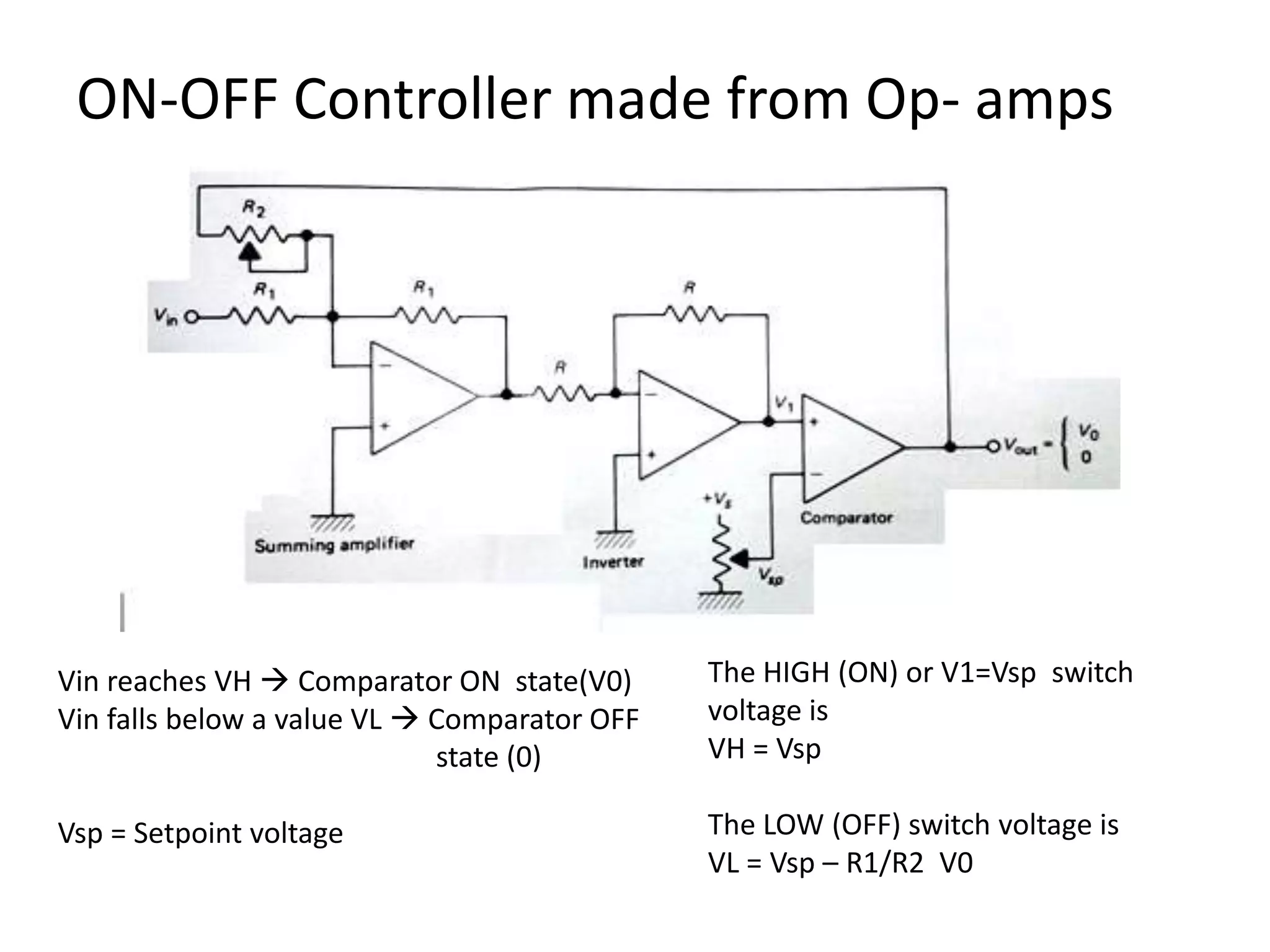
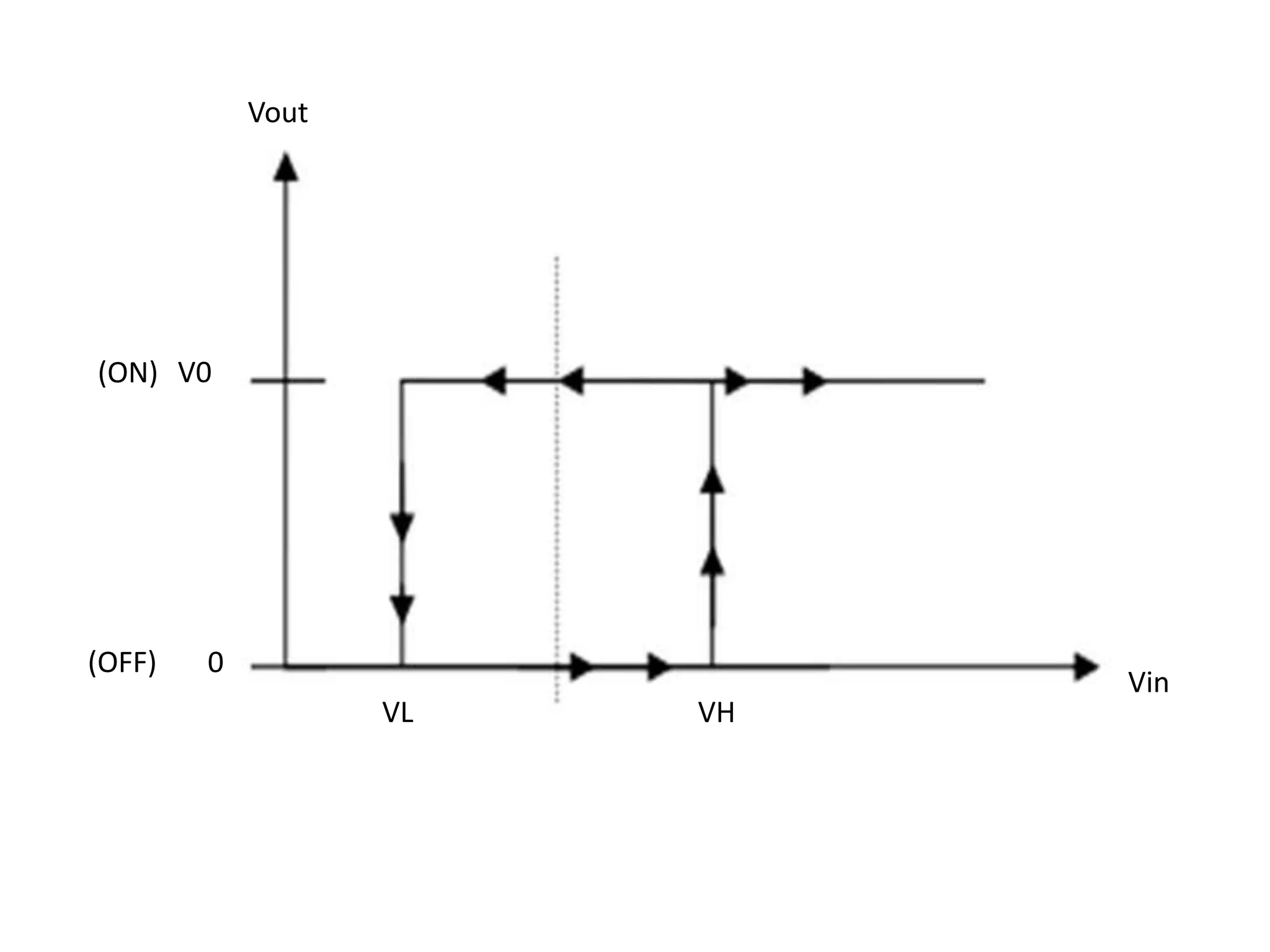
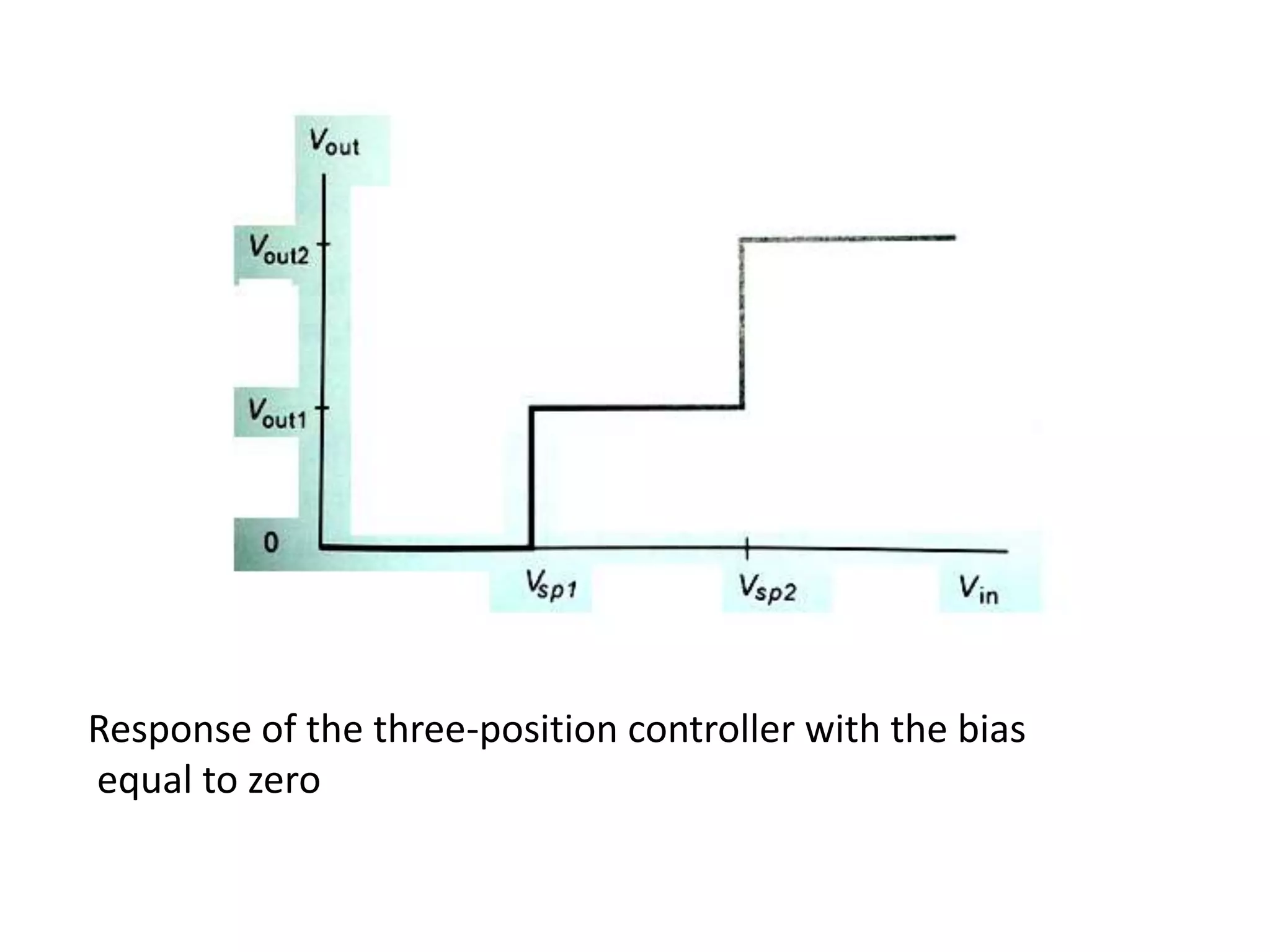
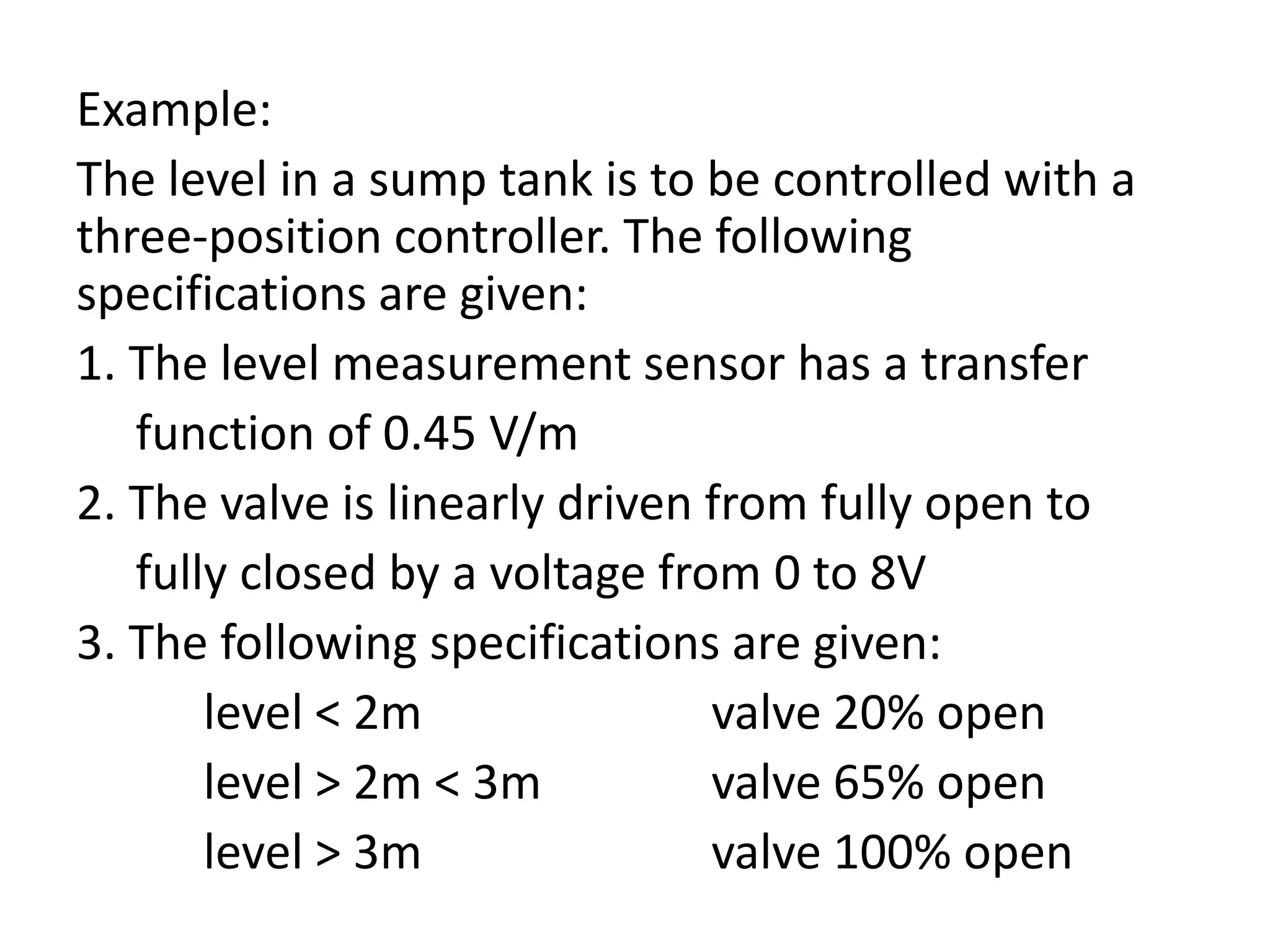
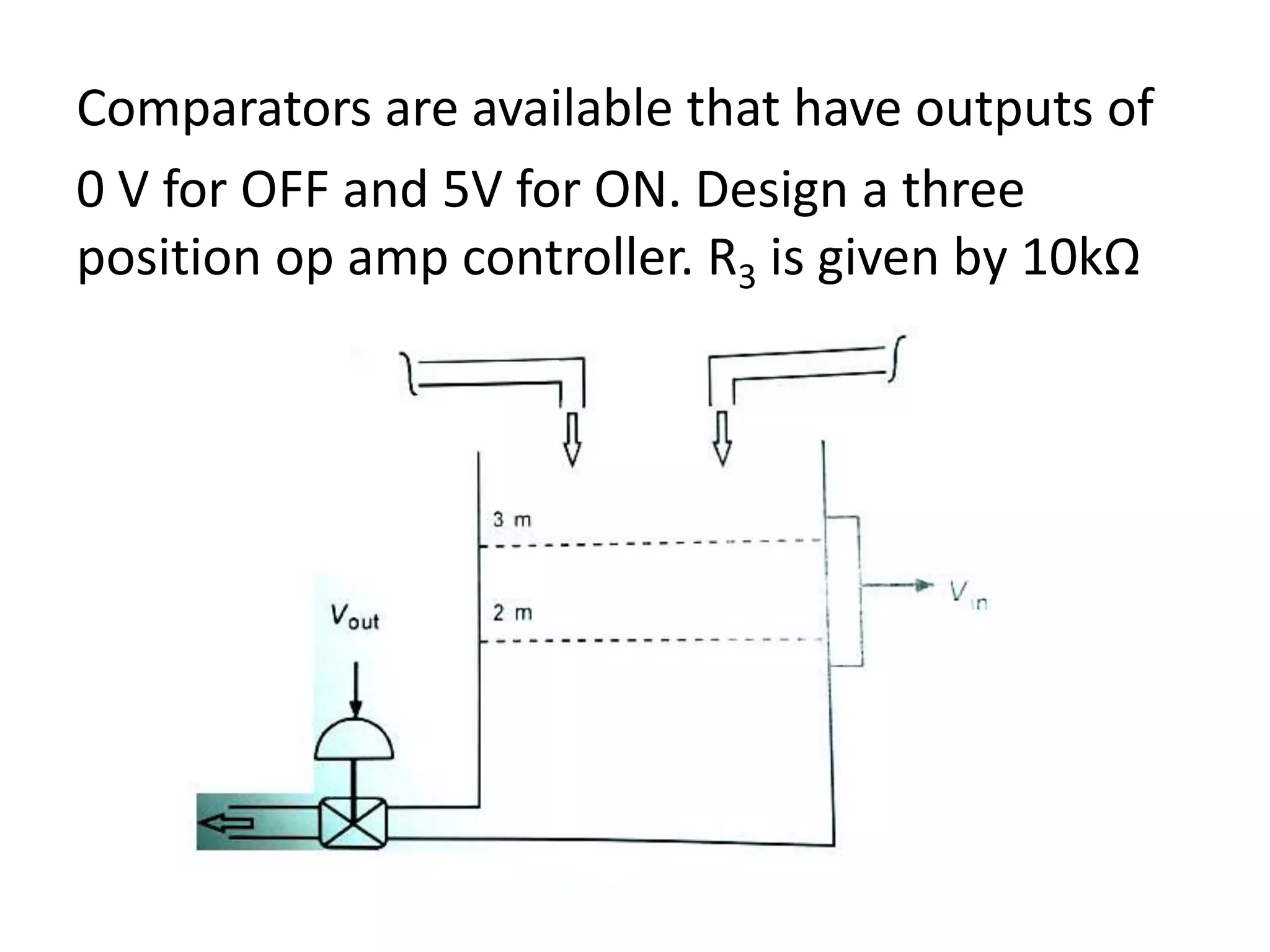
1. ON-OFF/two position controller - provides discontinuous control by switching between maximum and minimum output values.
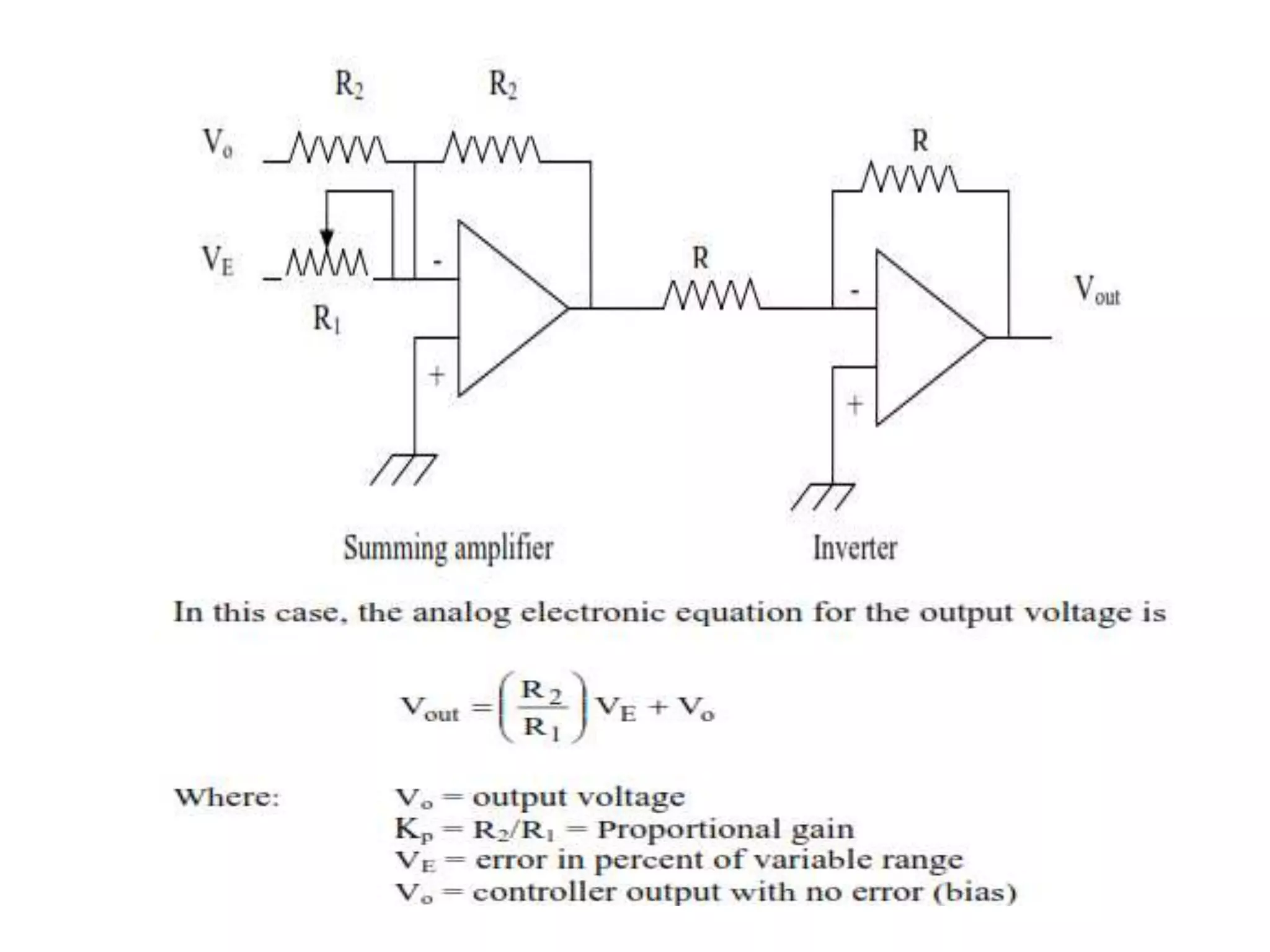
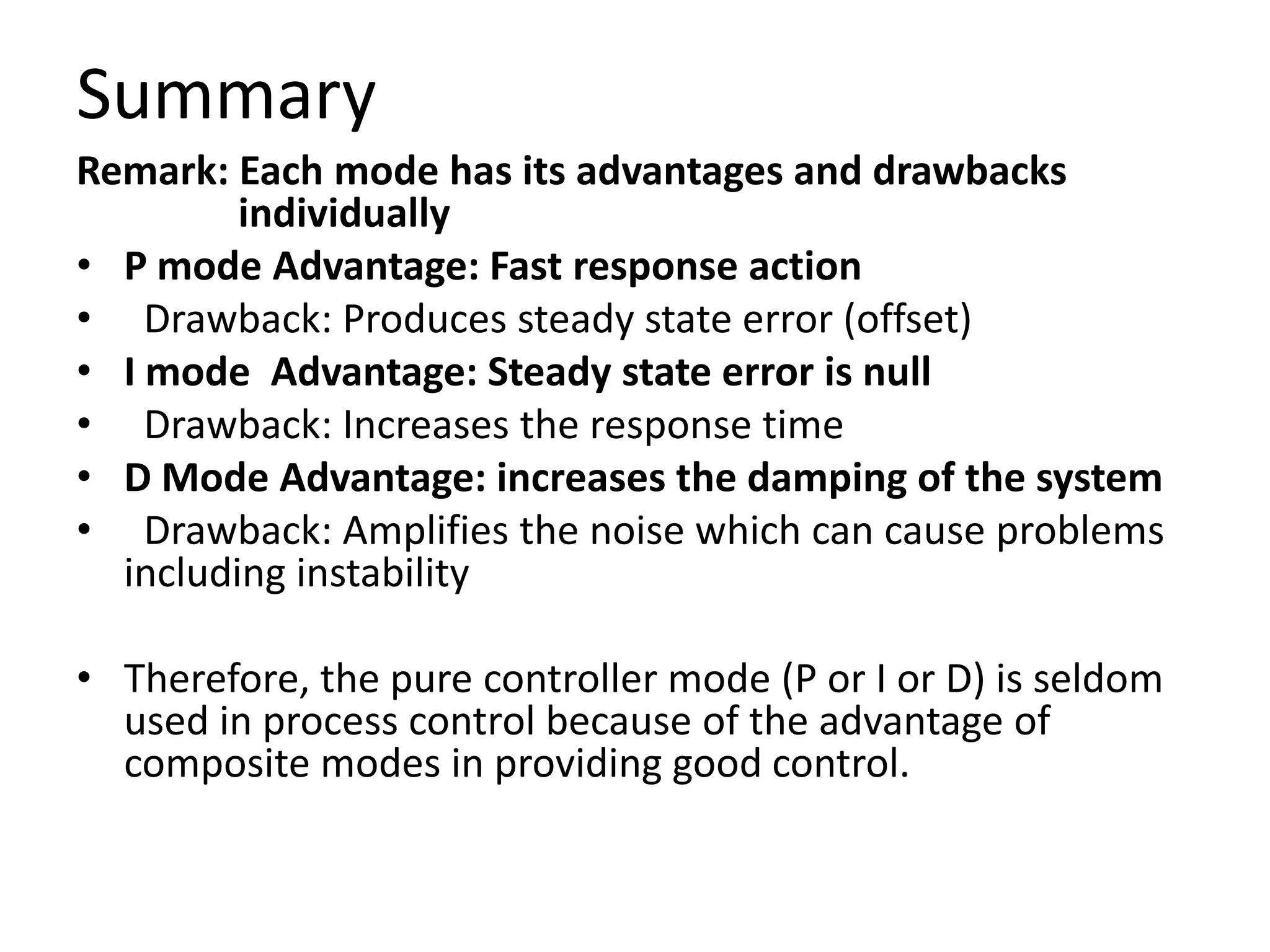
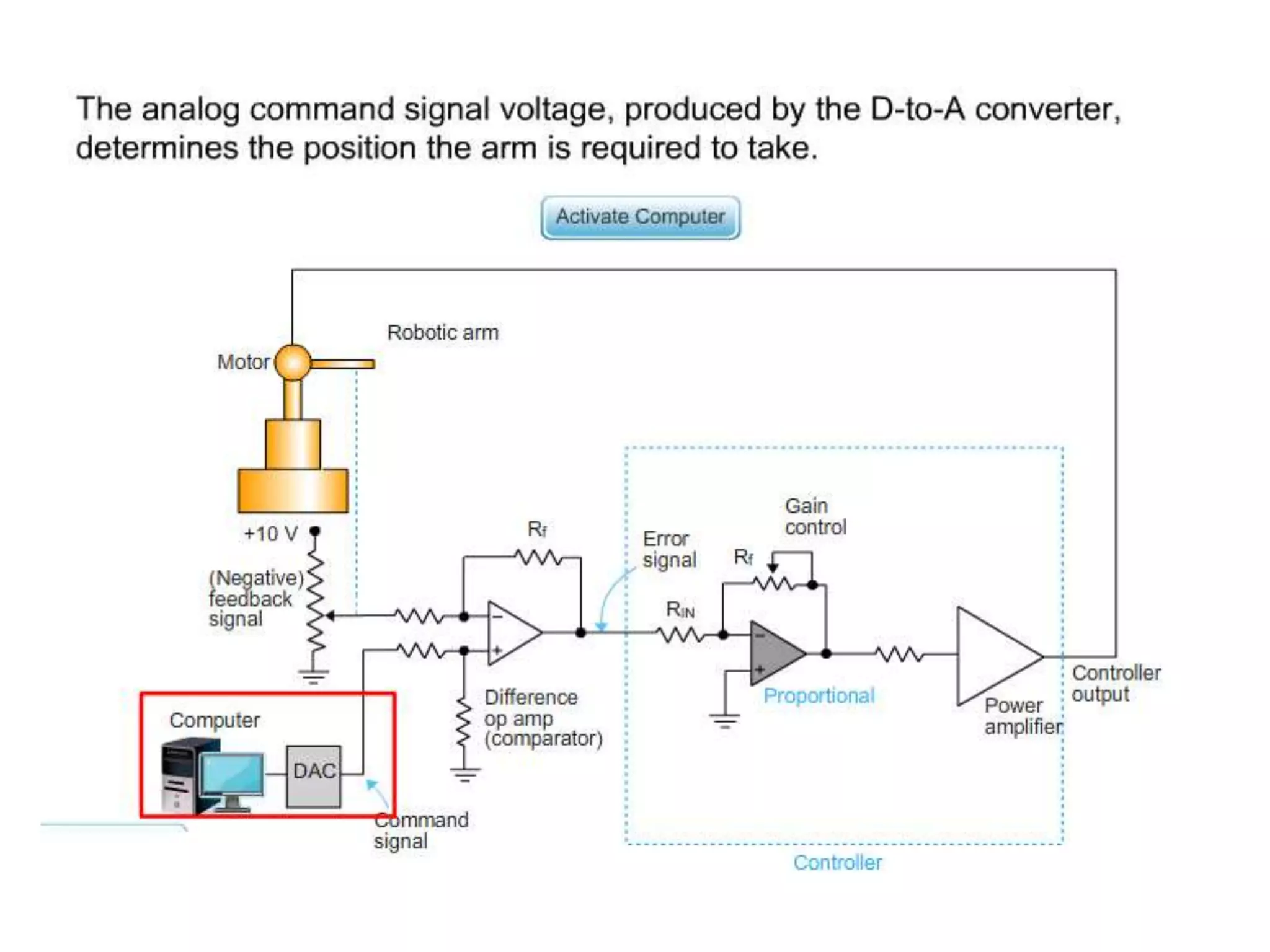
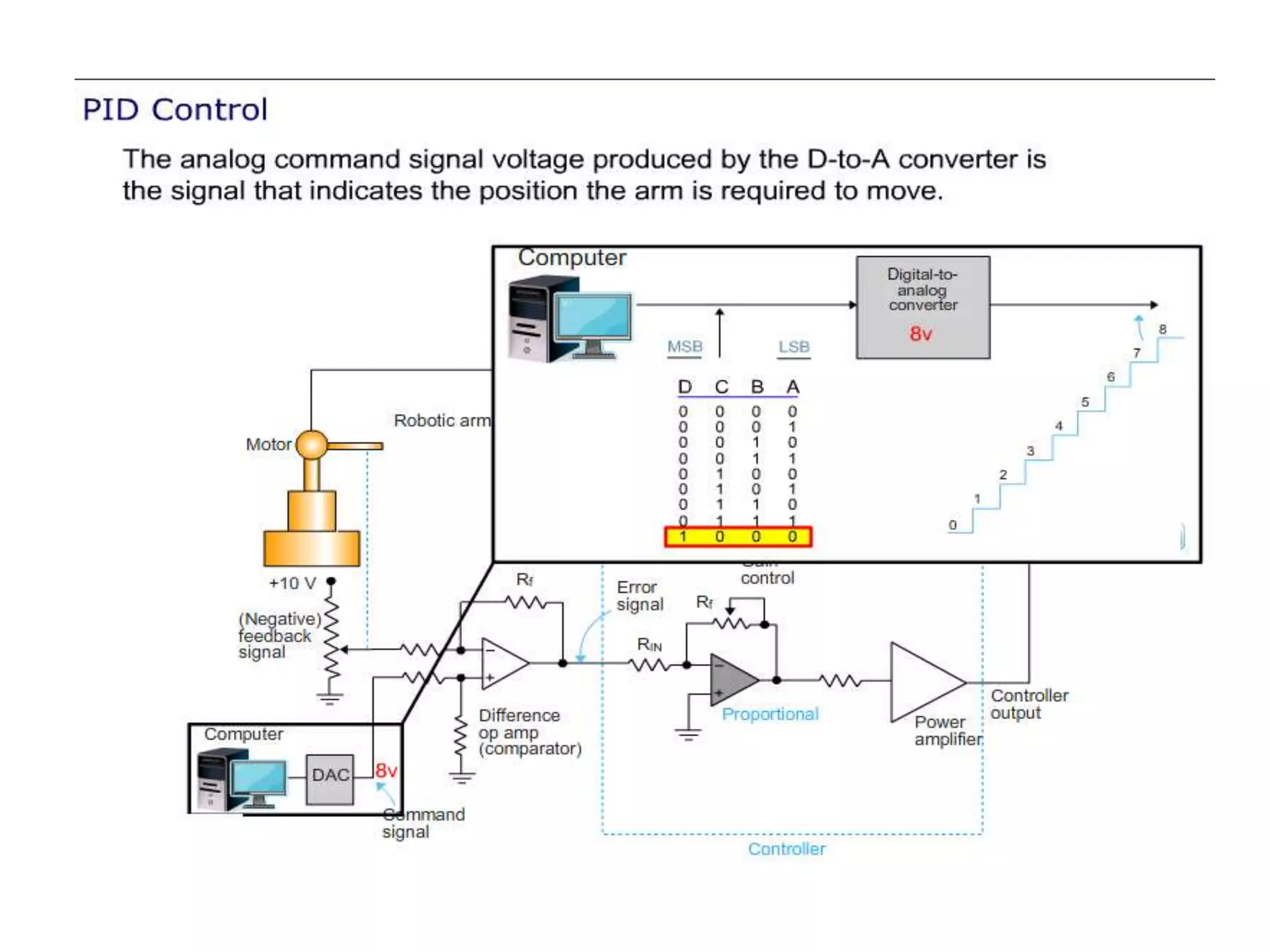
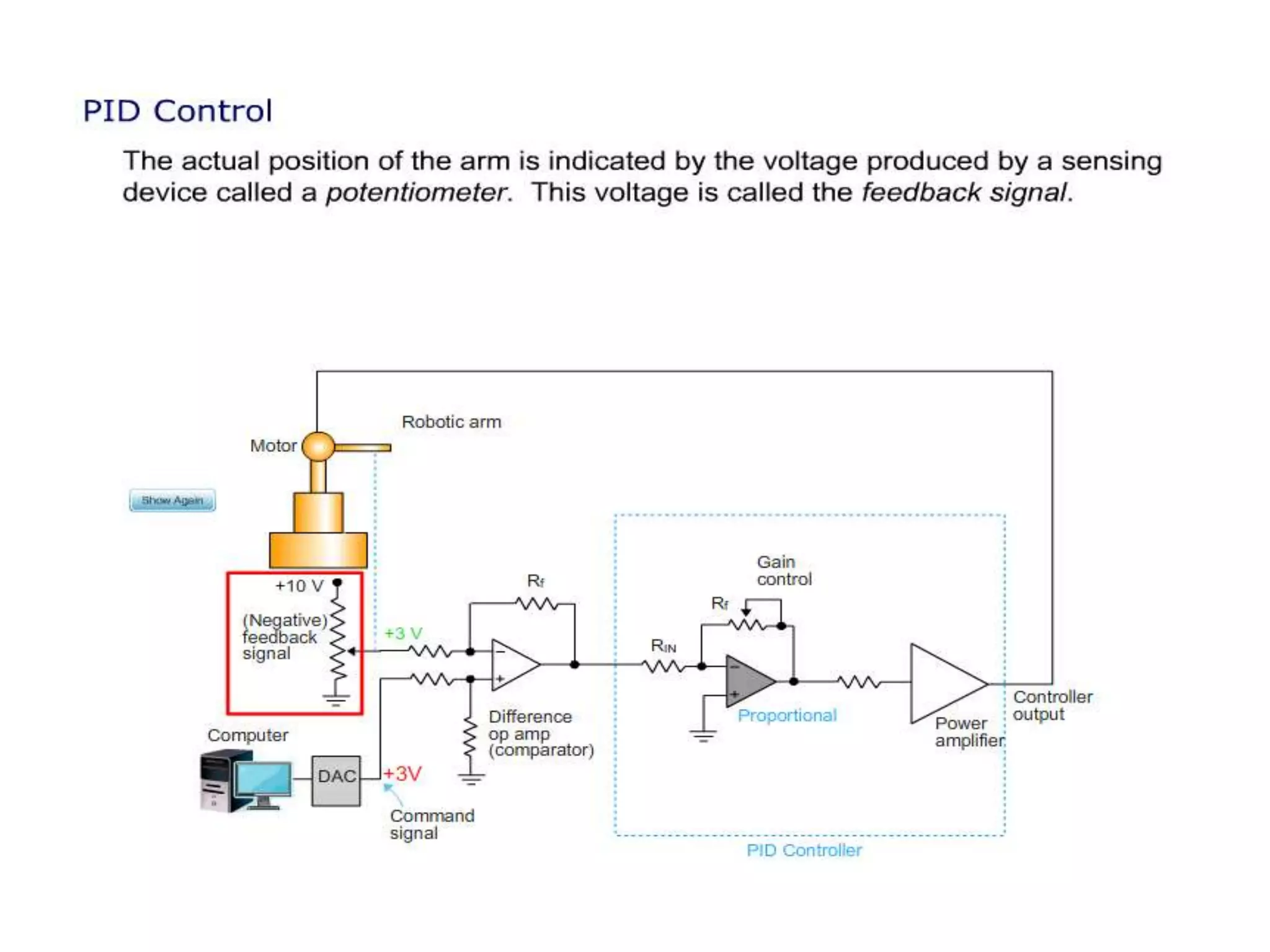
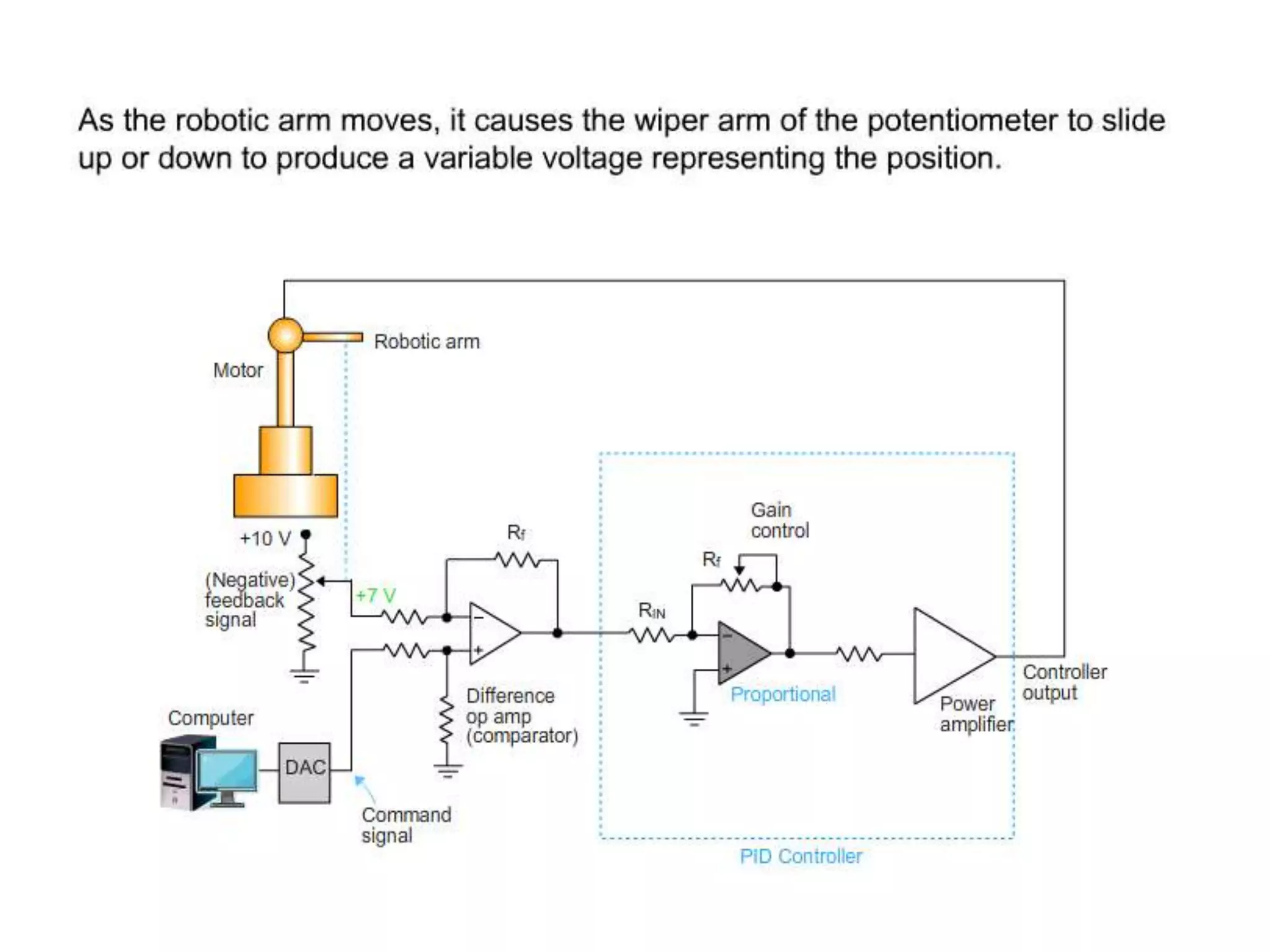
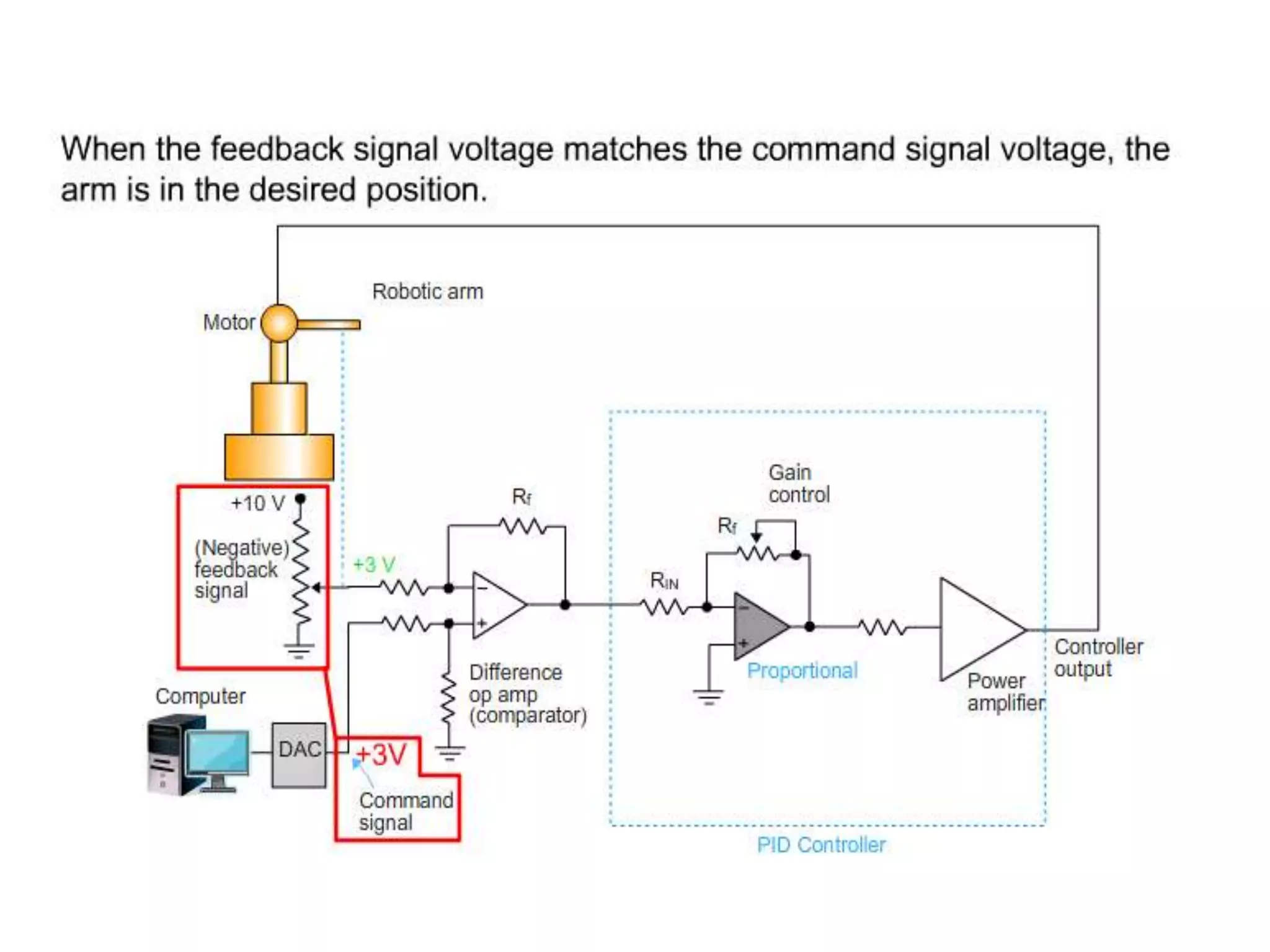
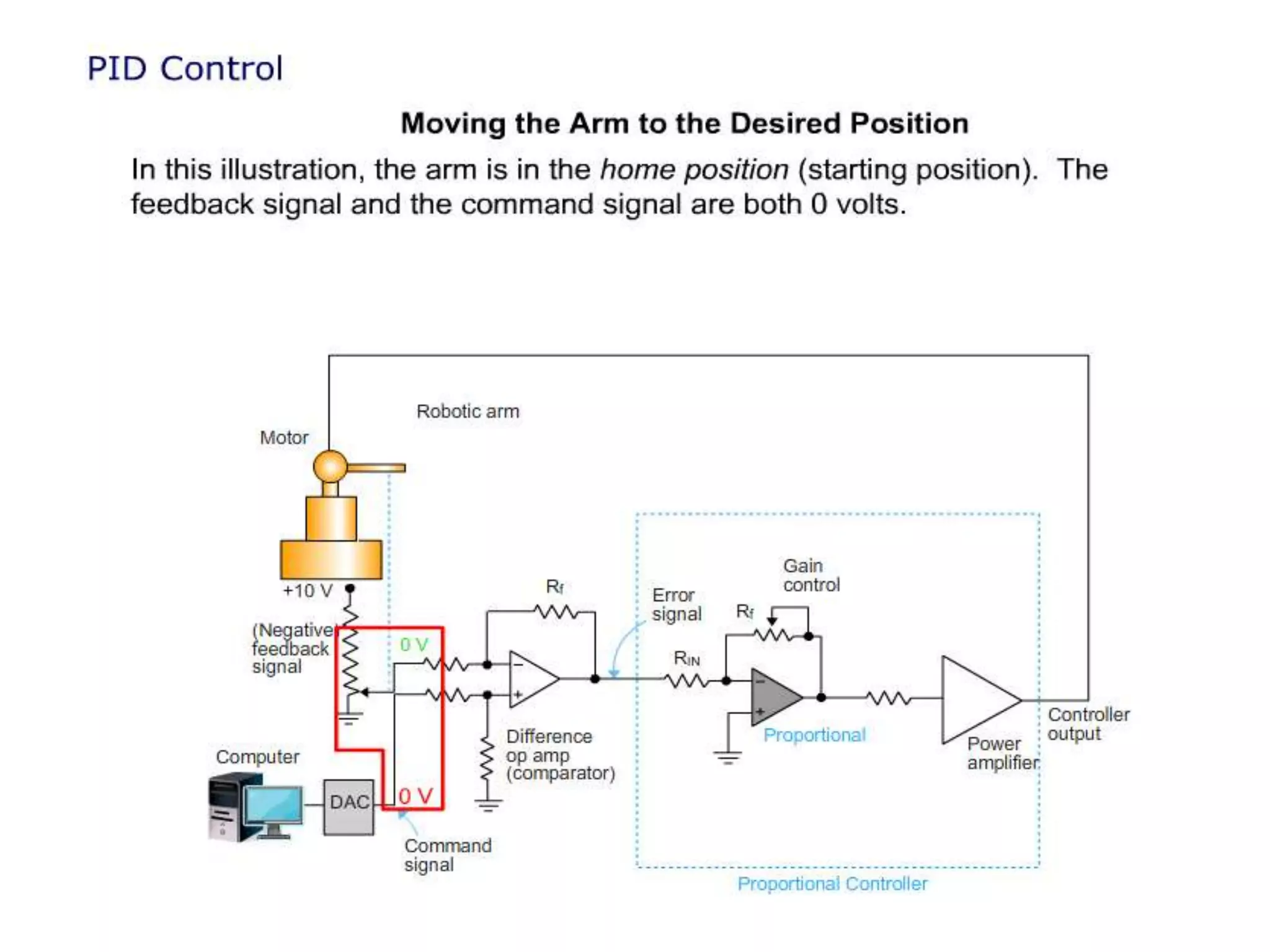
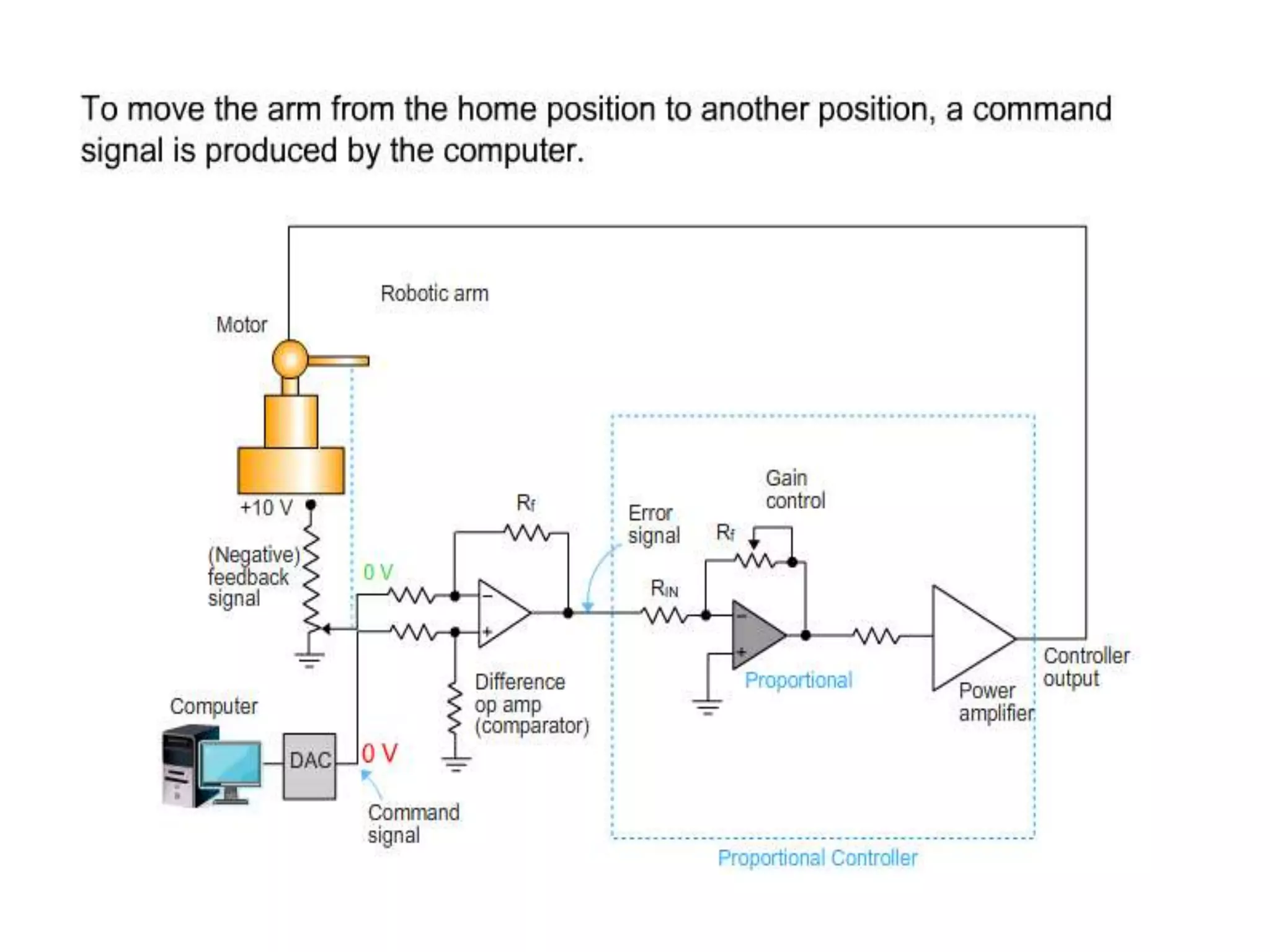
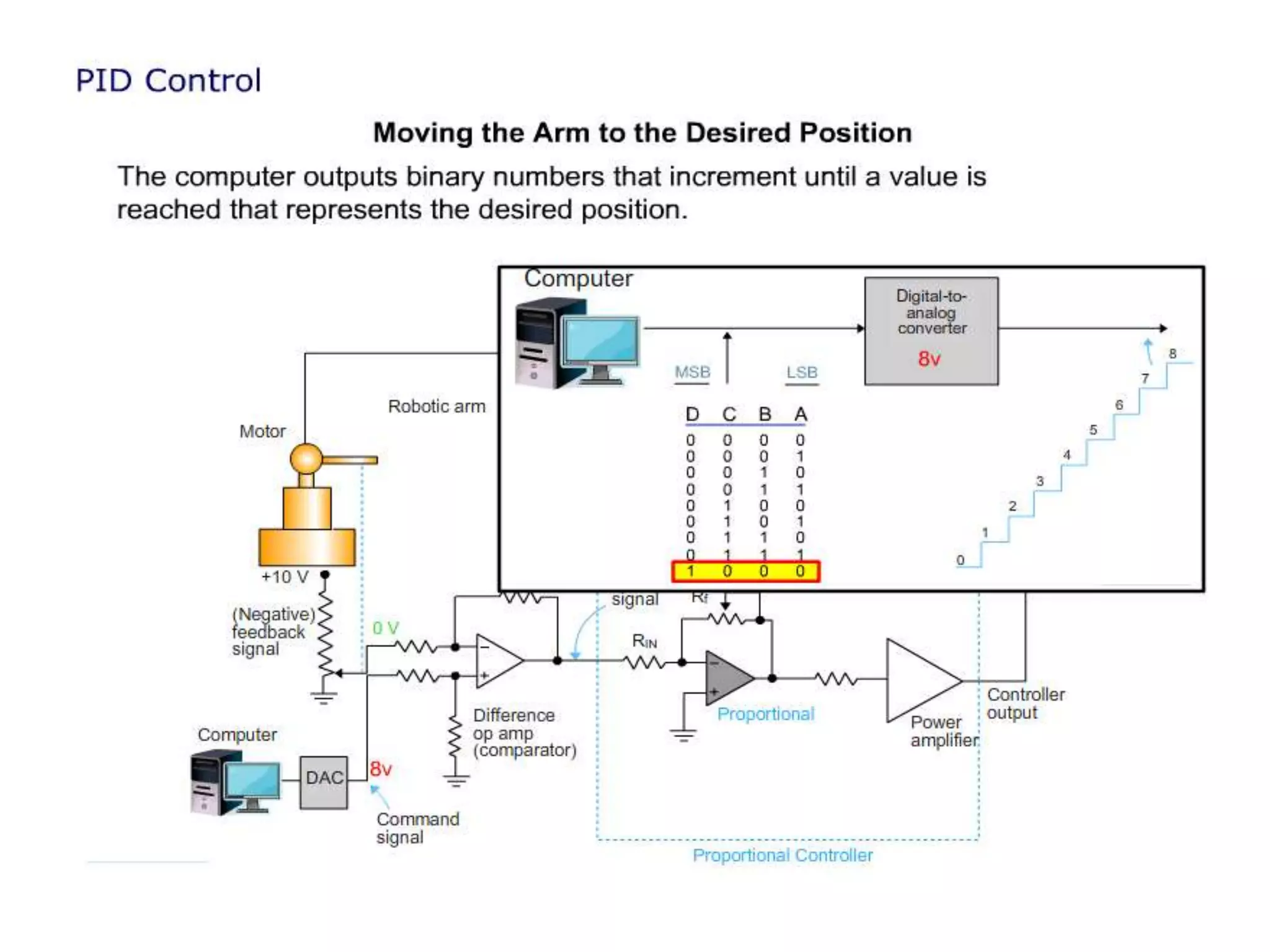
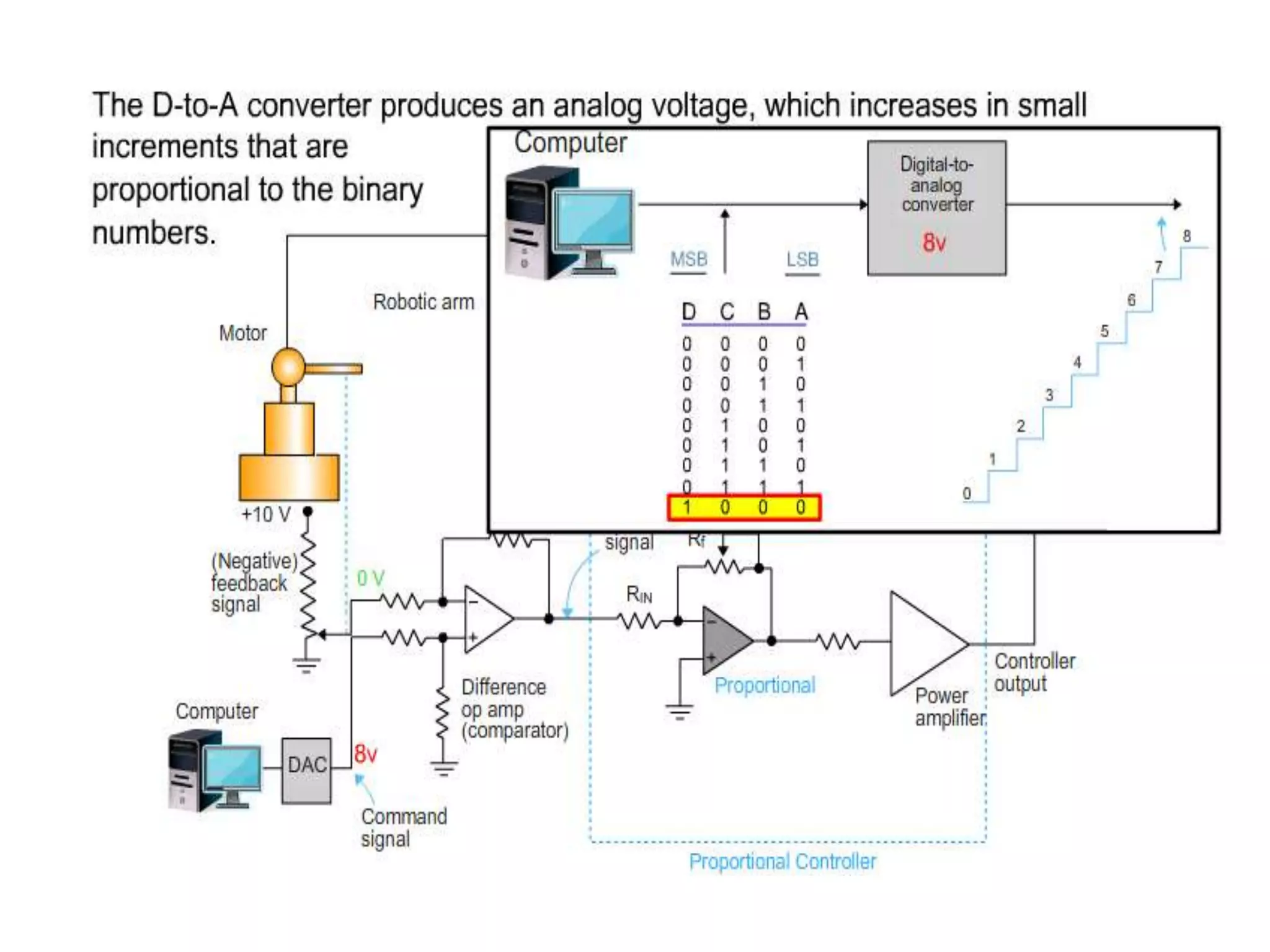
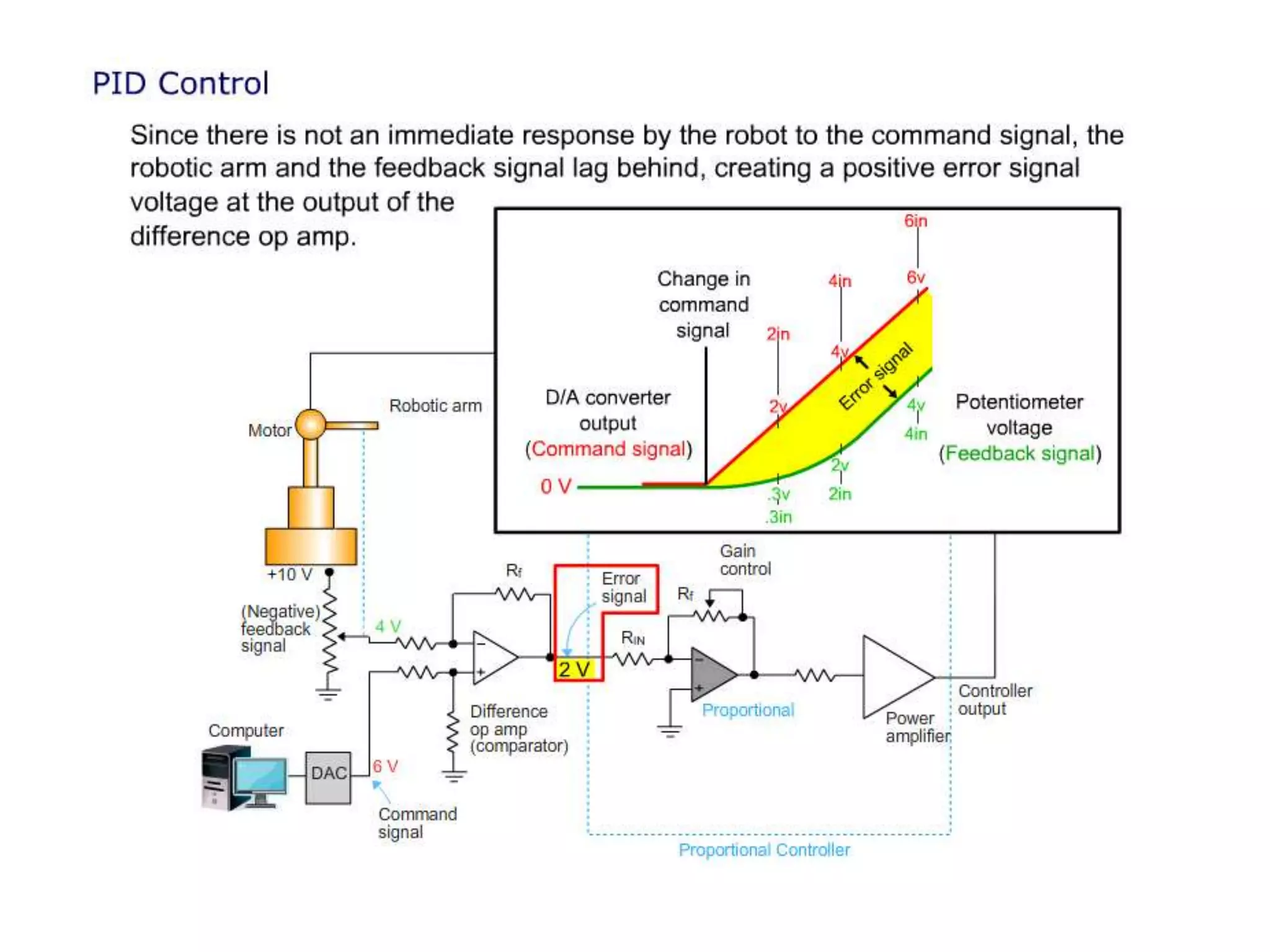
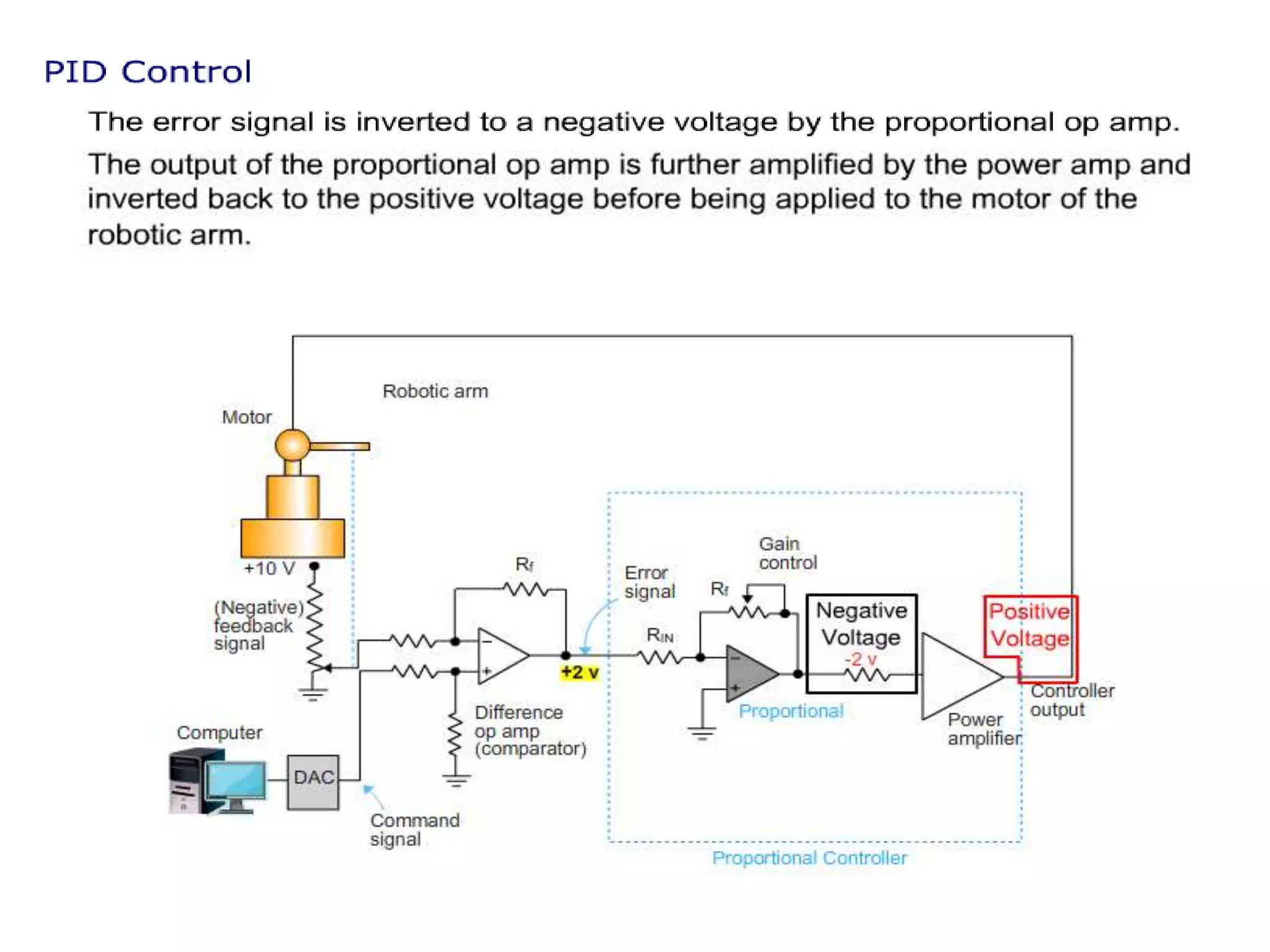
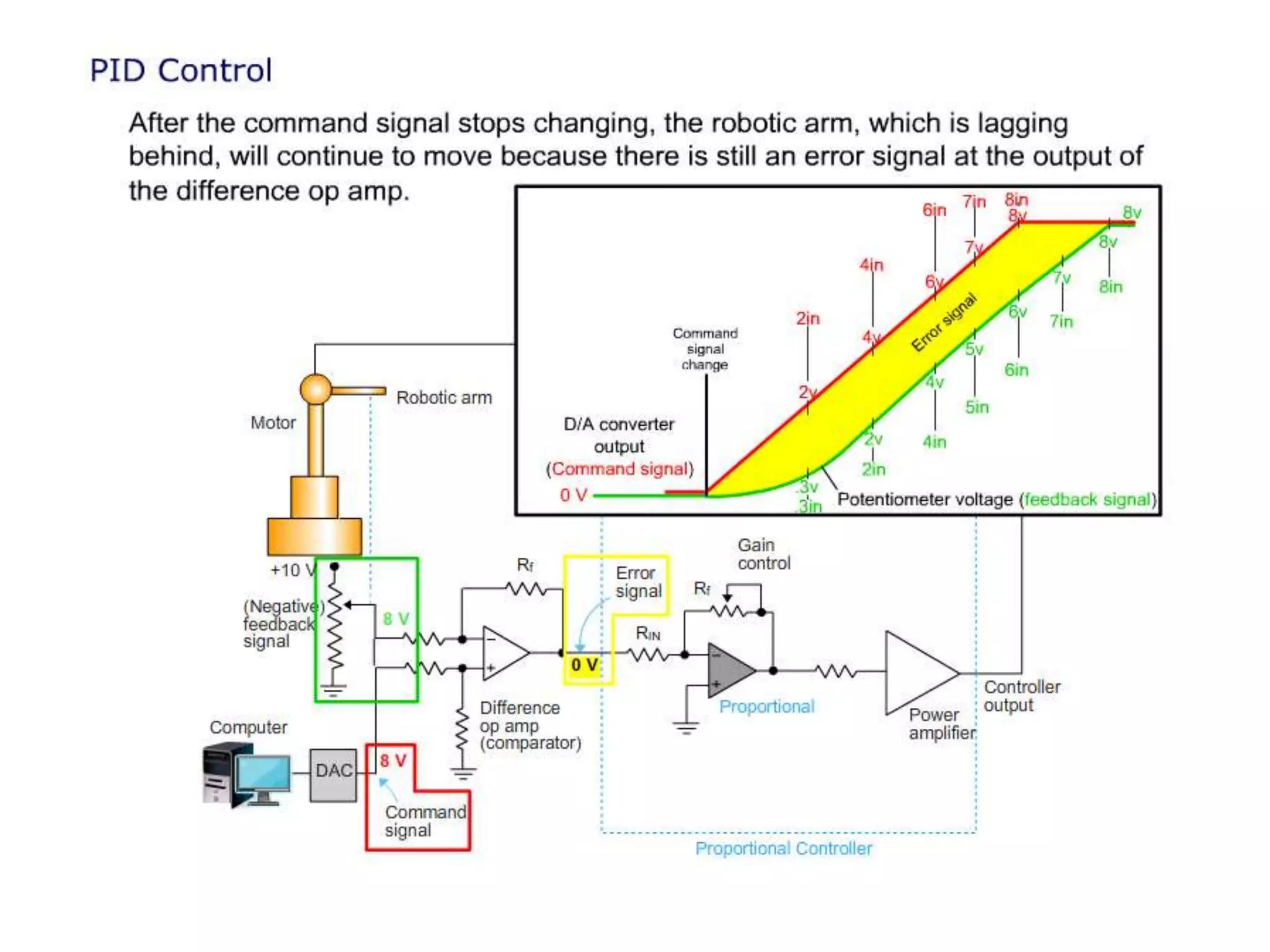
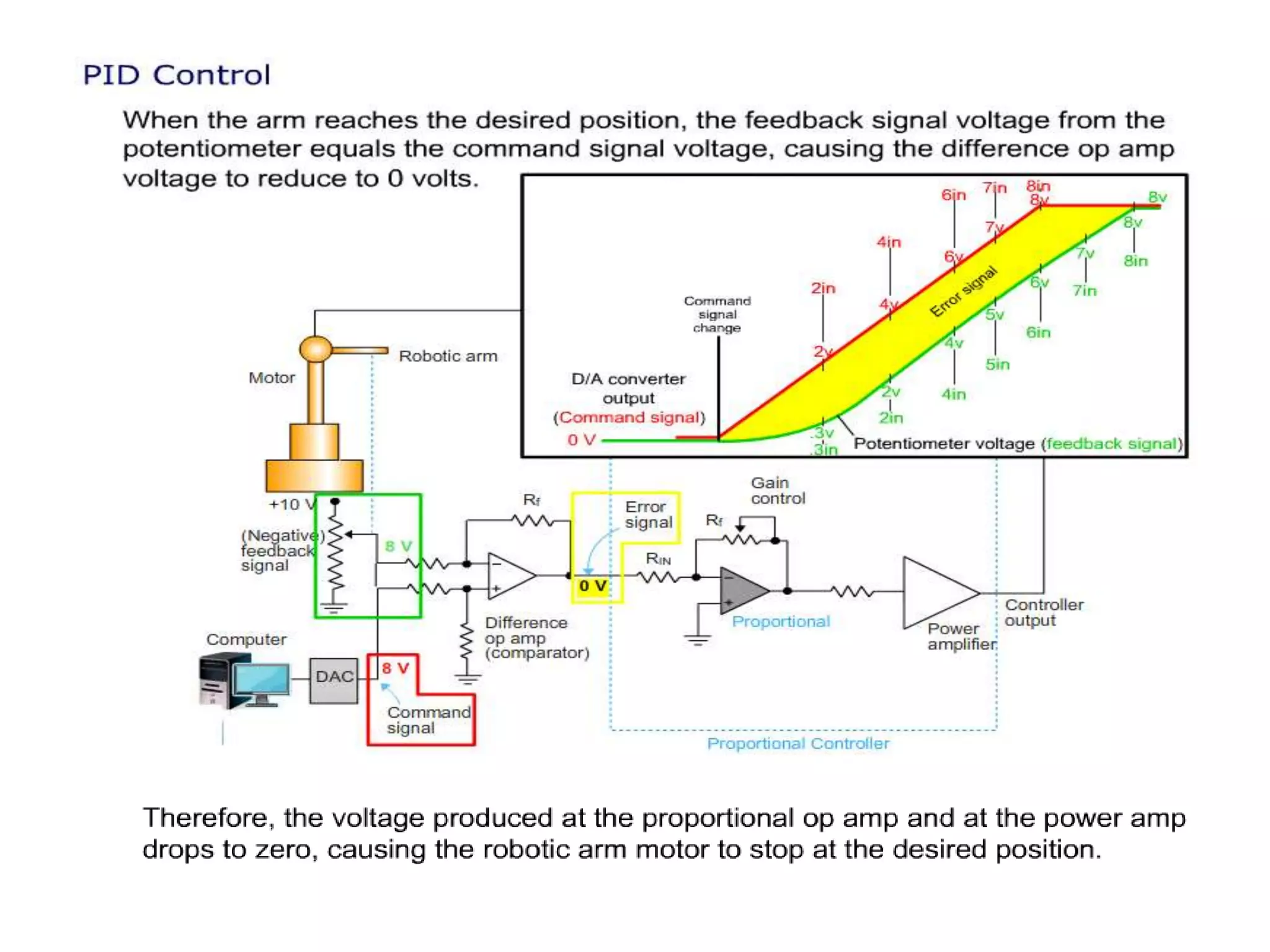
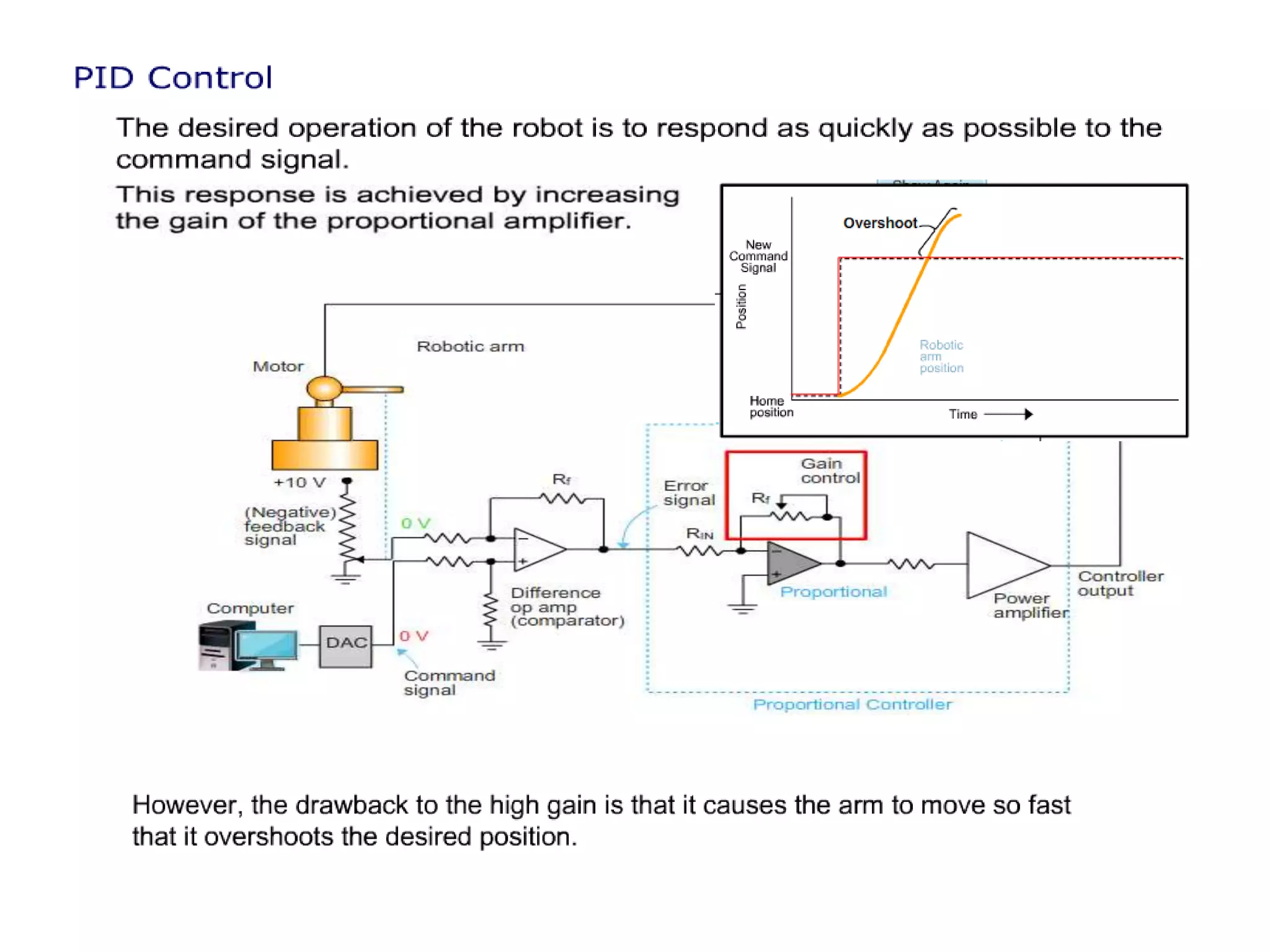
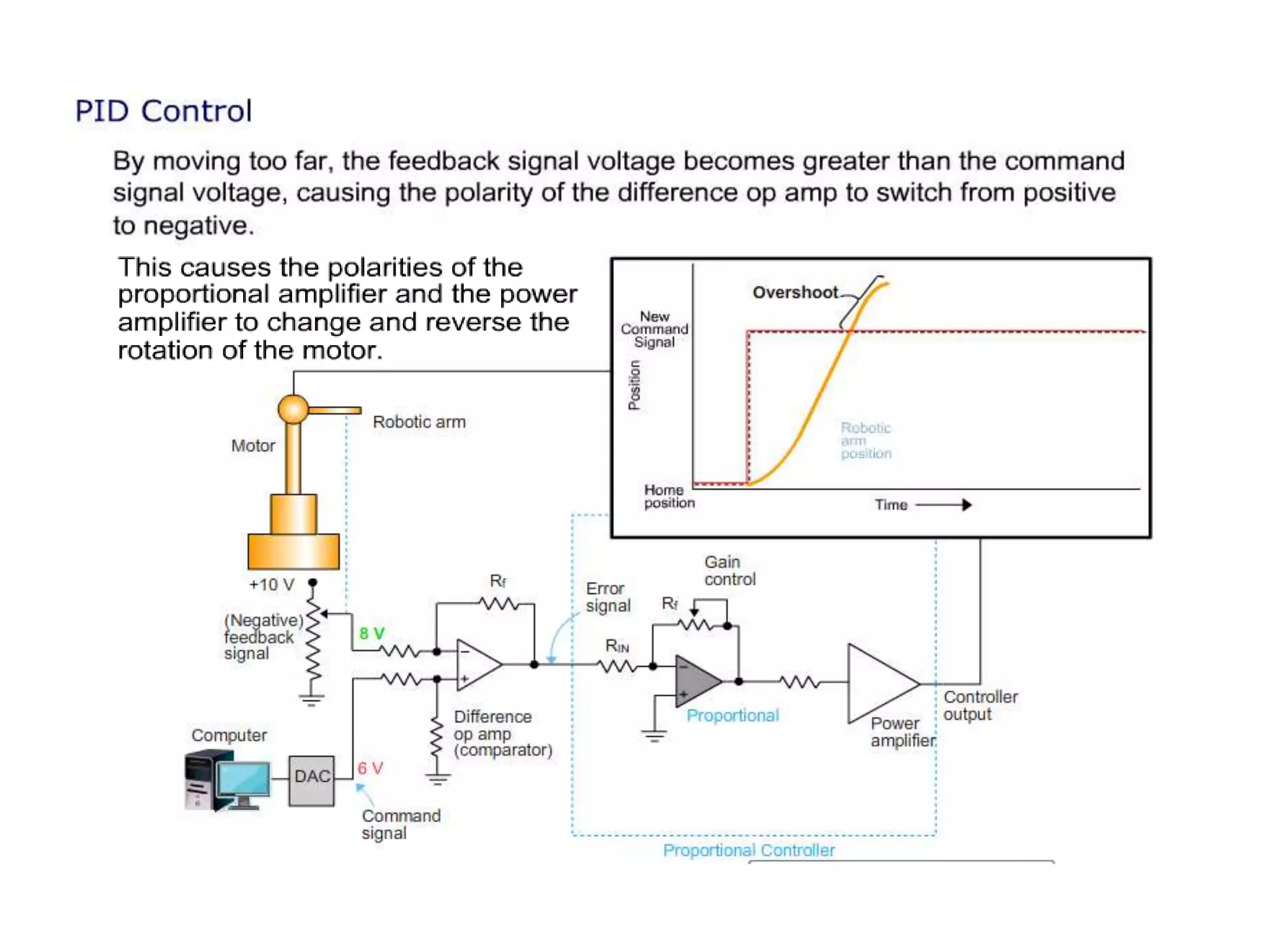
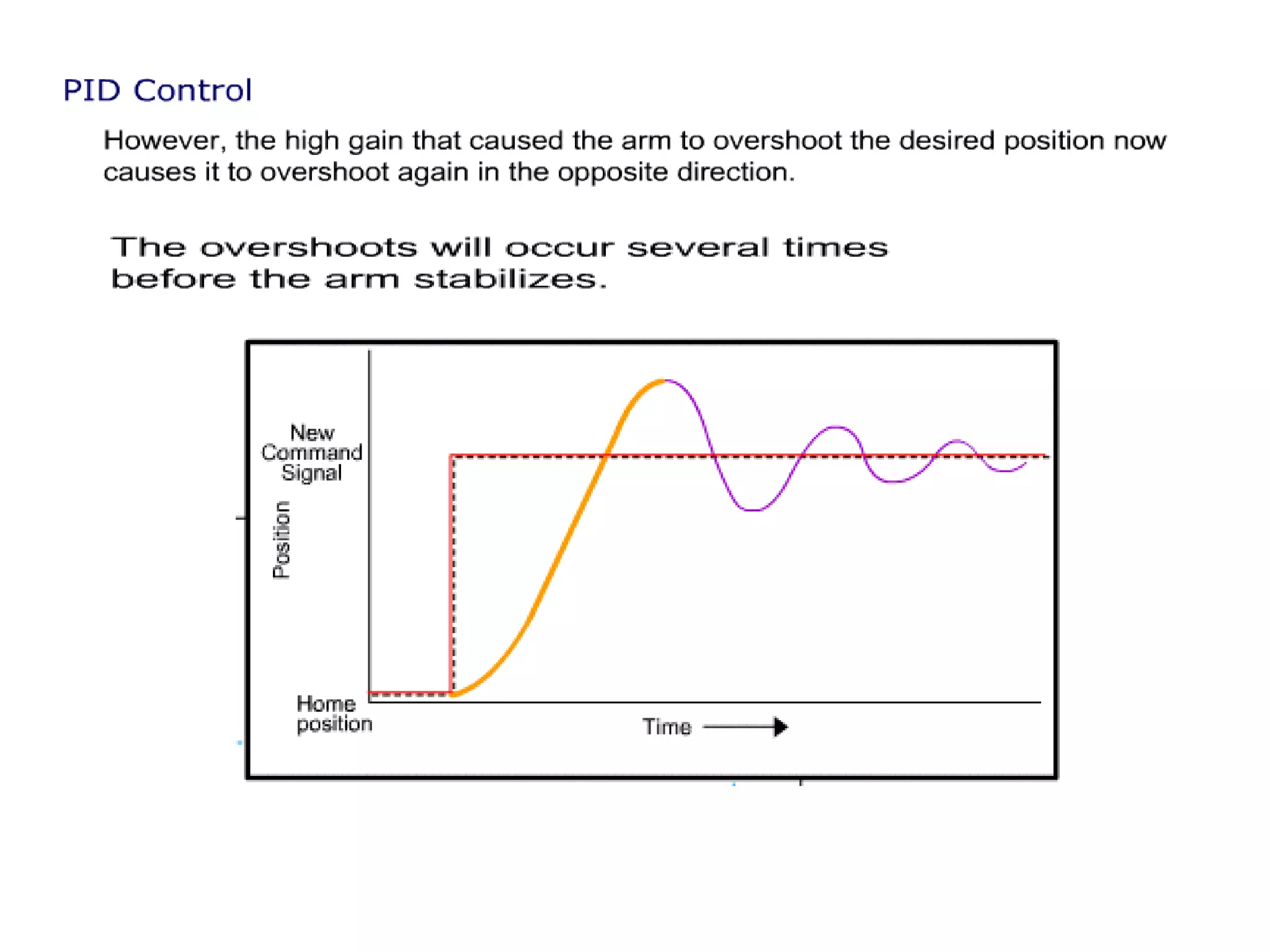
2. Proportional (P) control - controller output is proportional to the error. Provides fast response but steady state error.
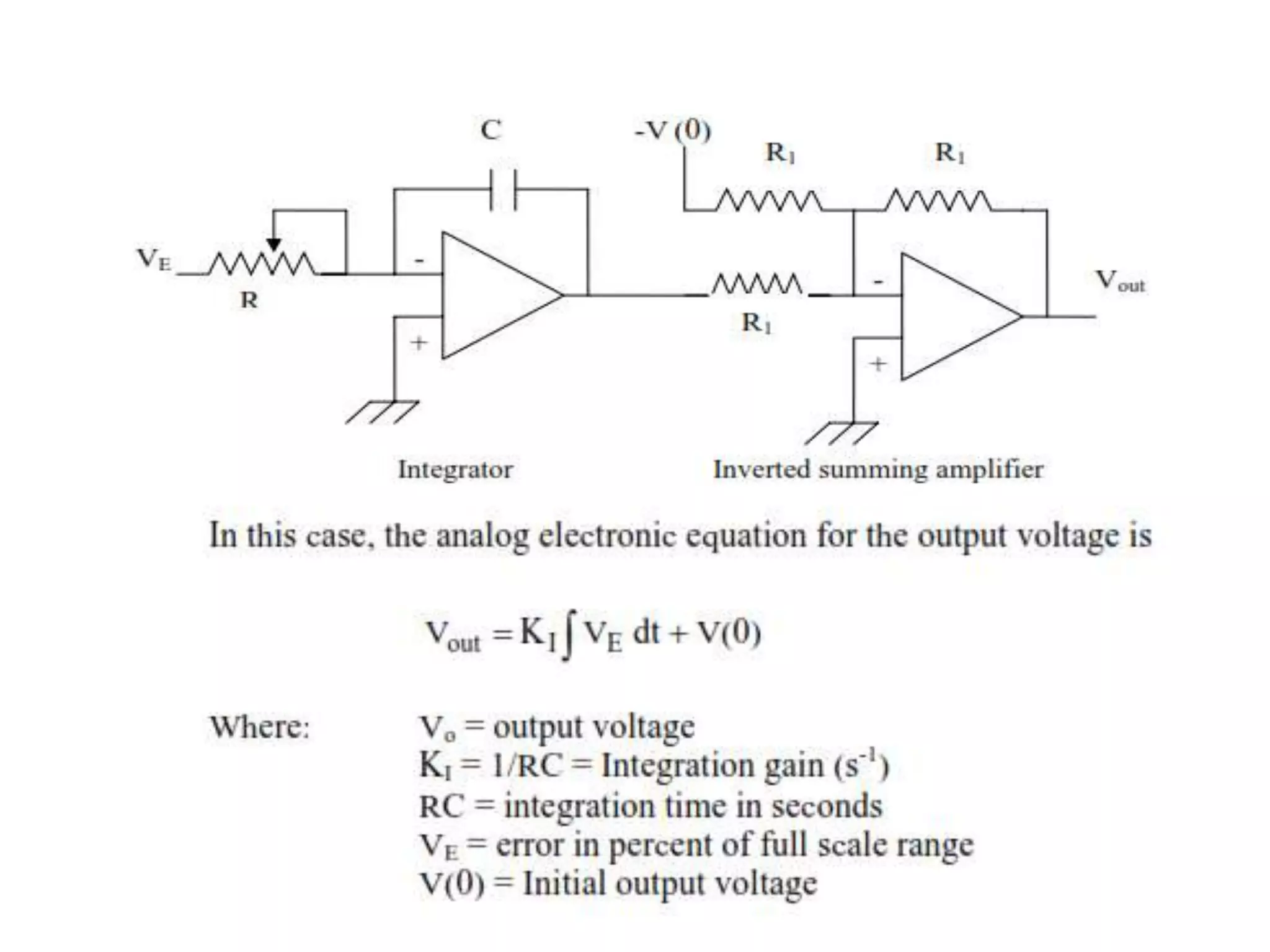
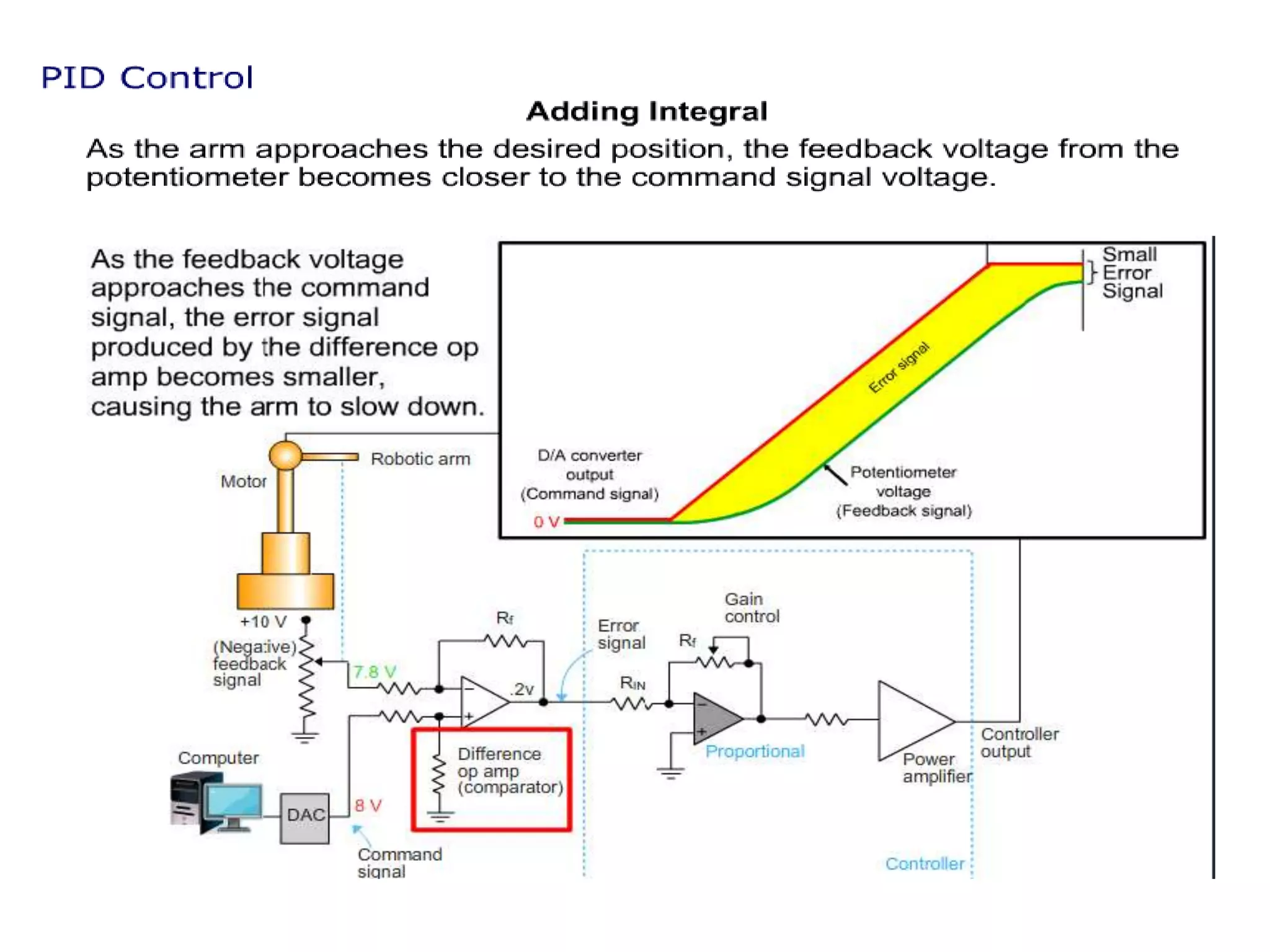
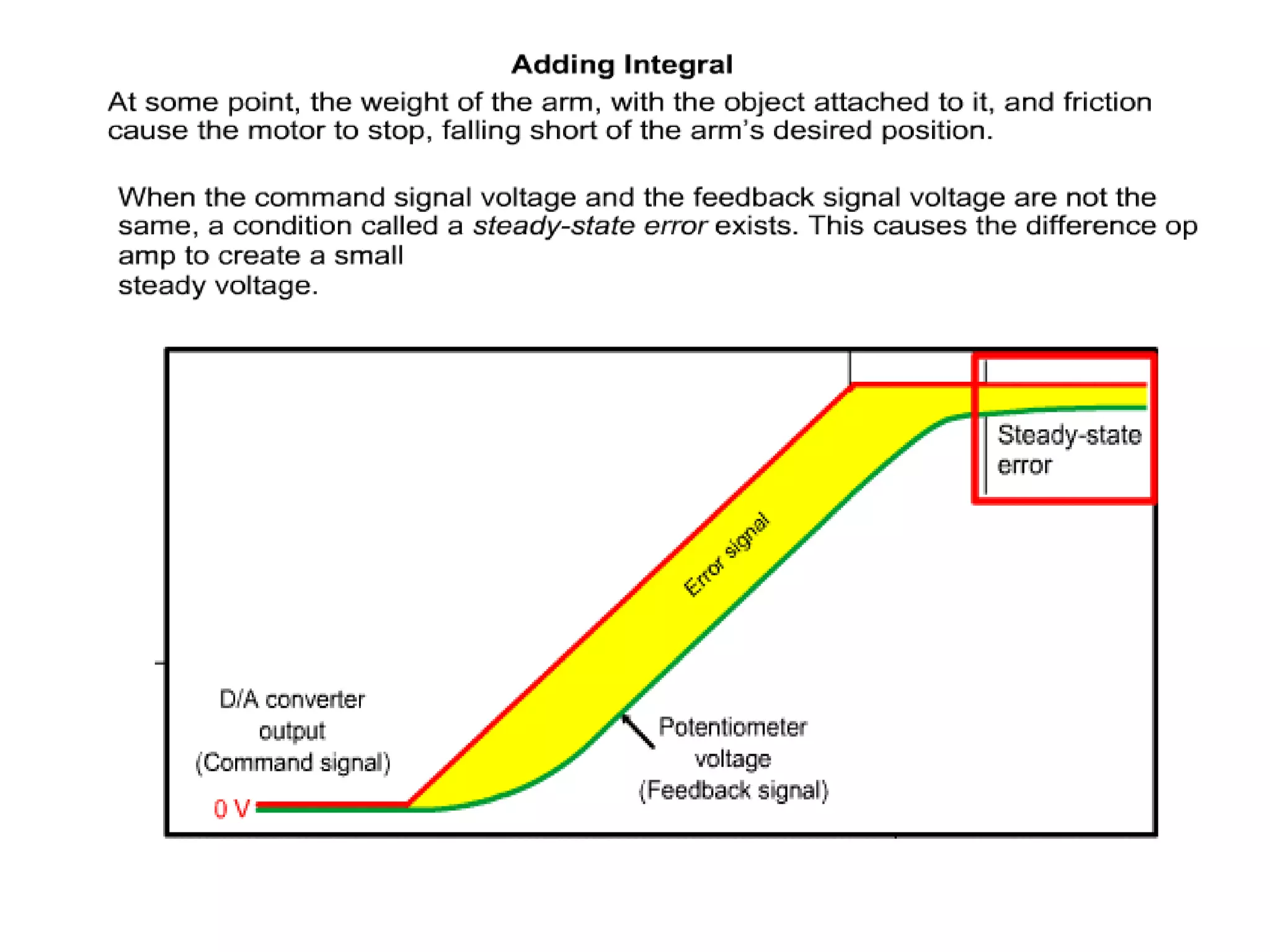
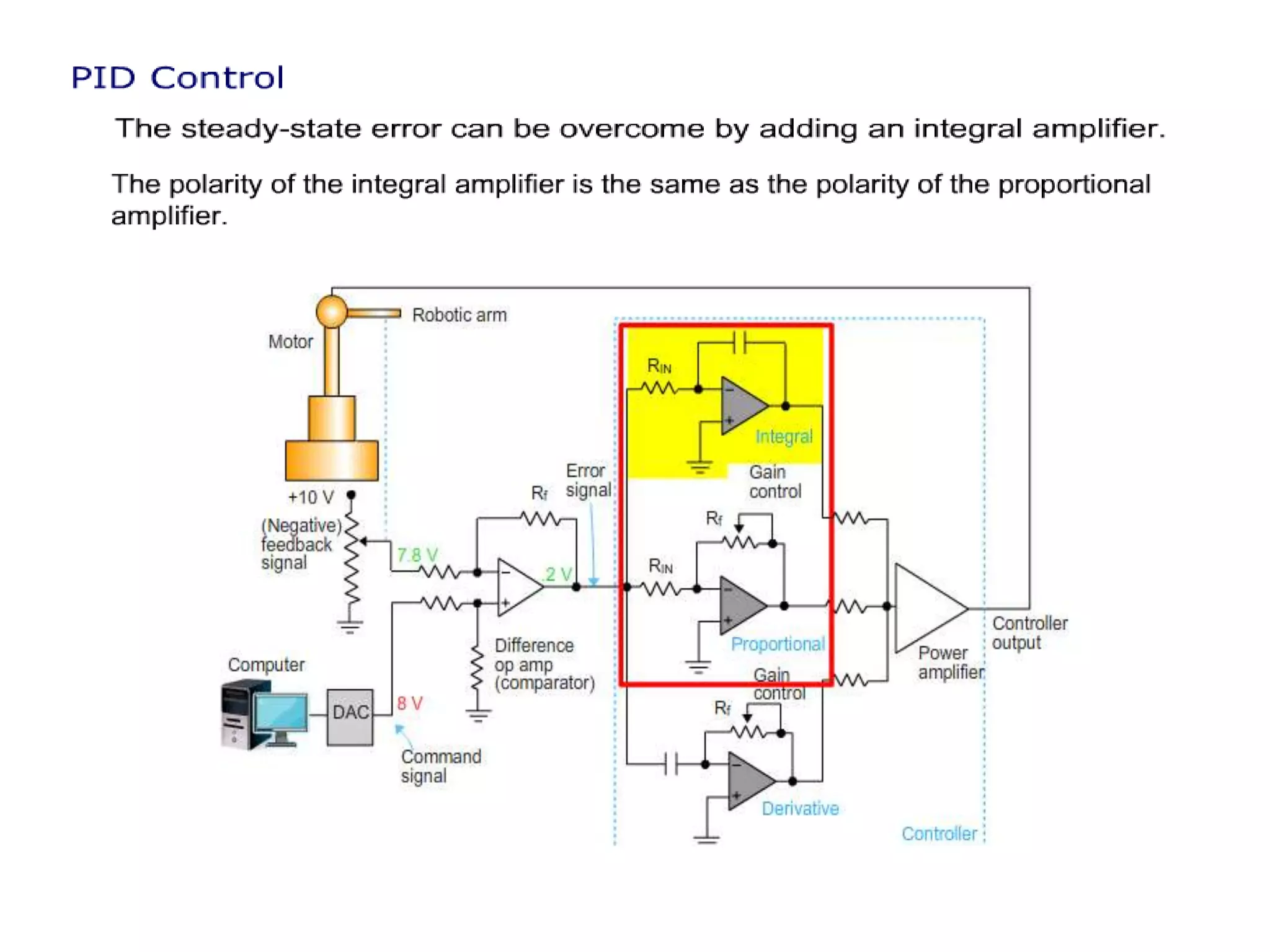
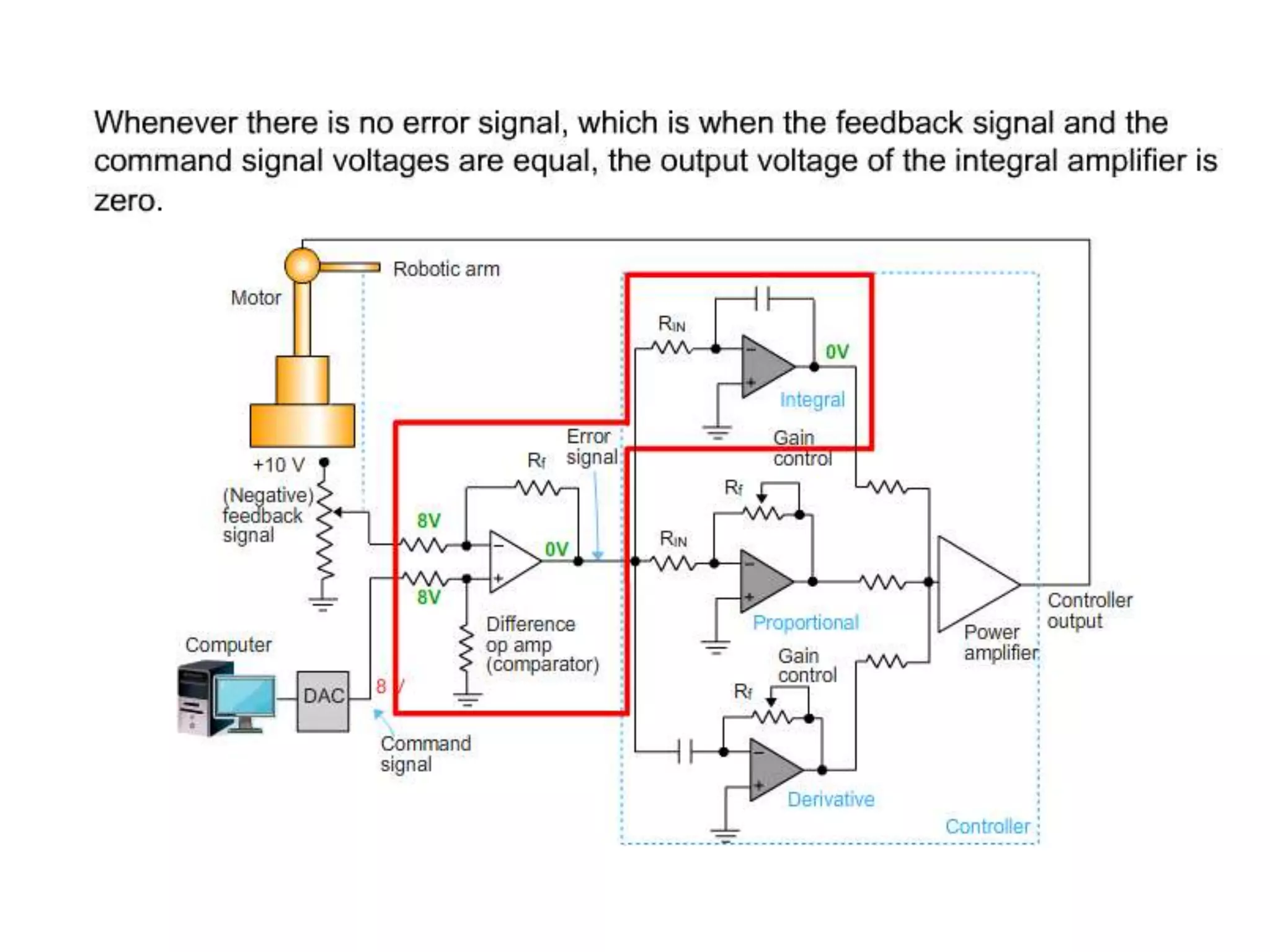
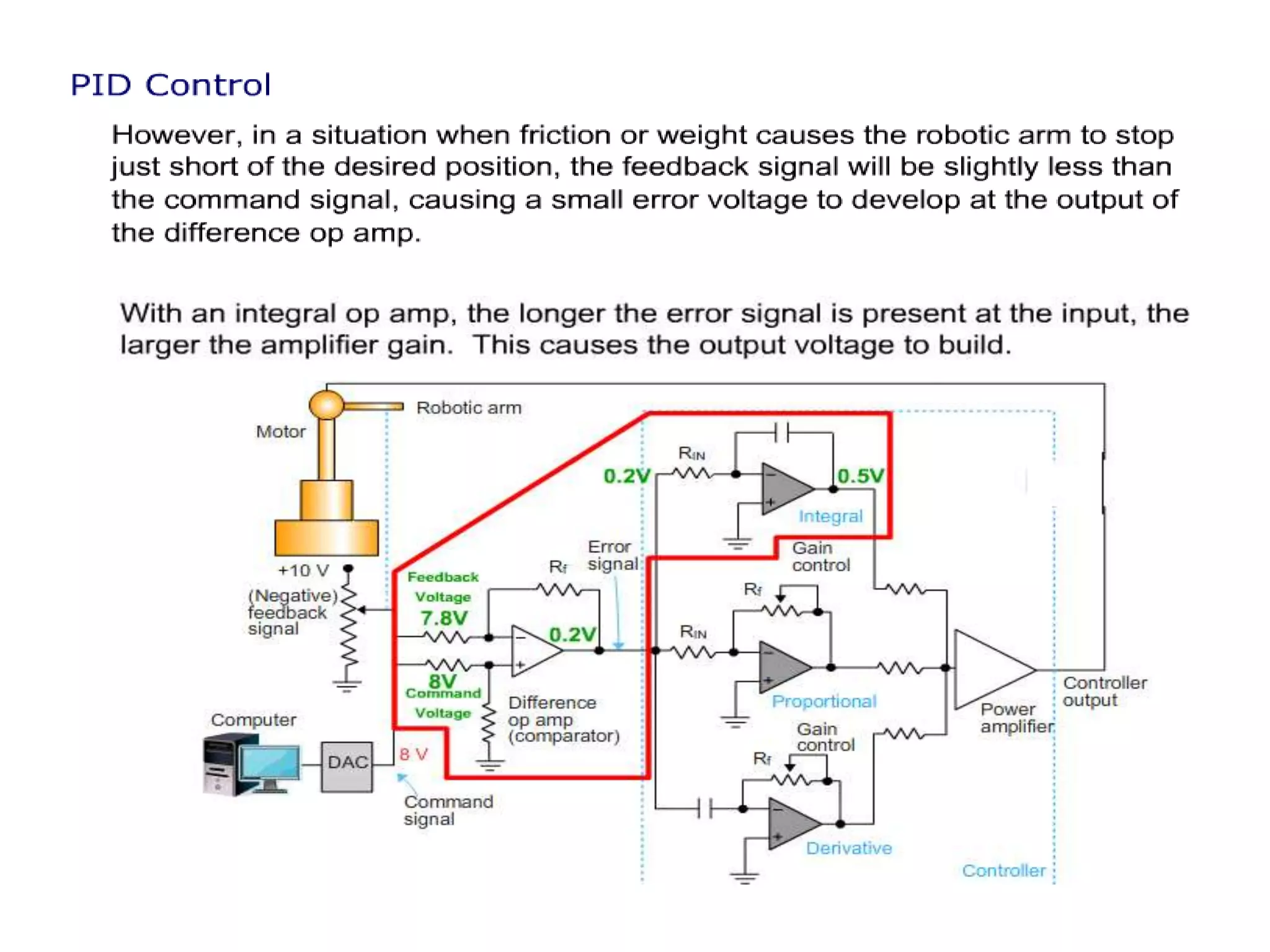
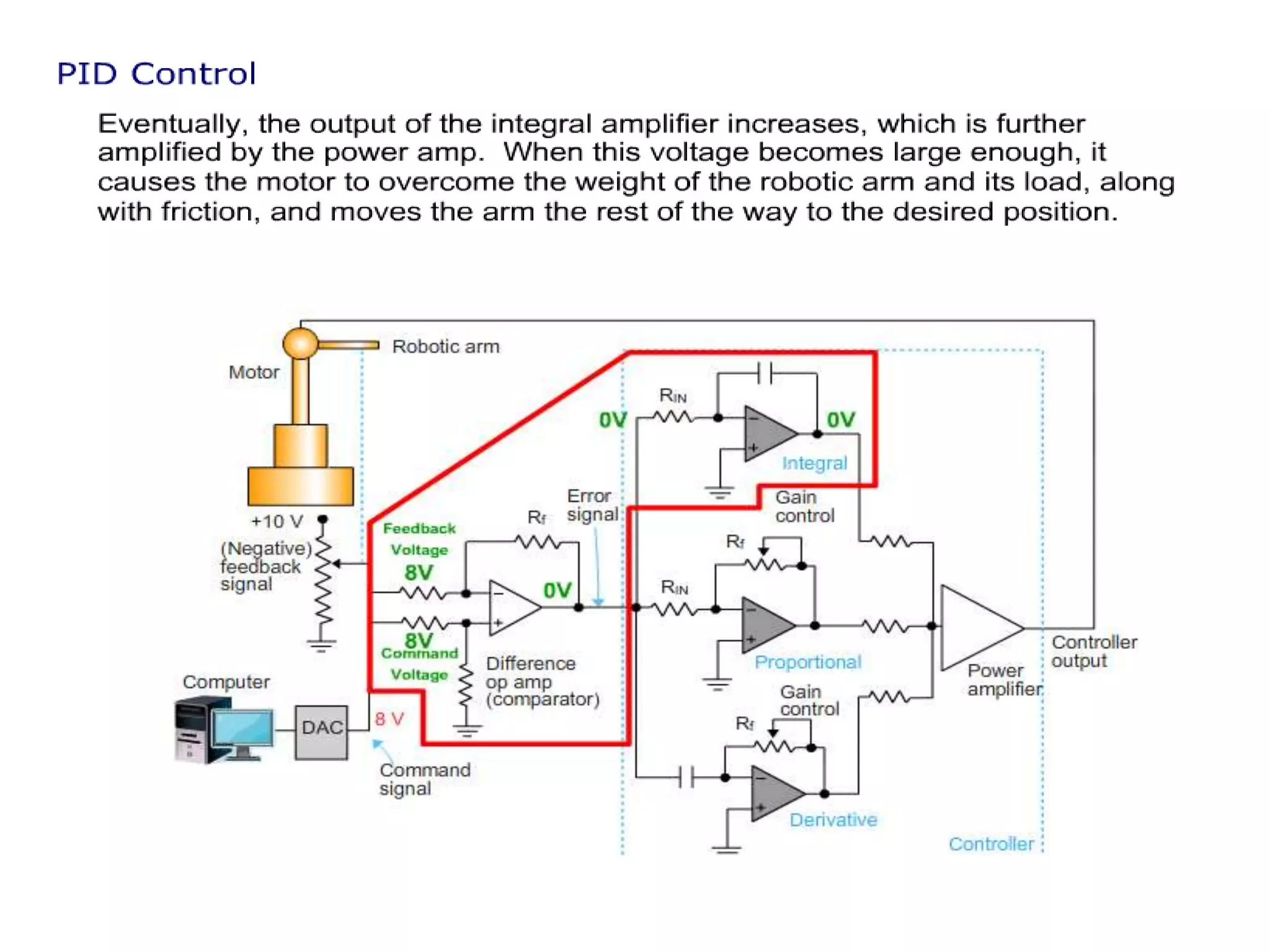
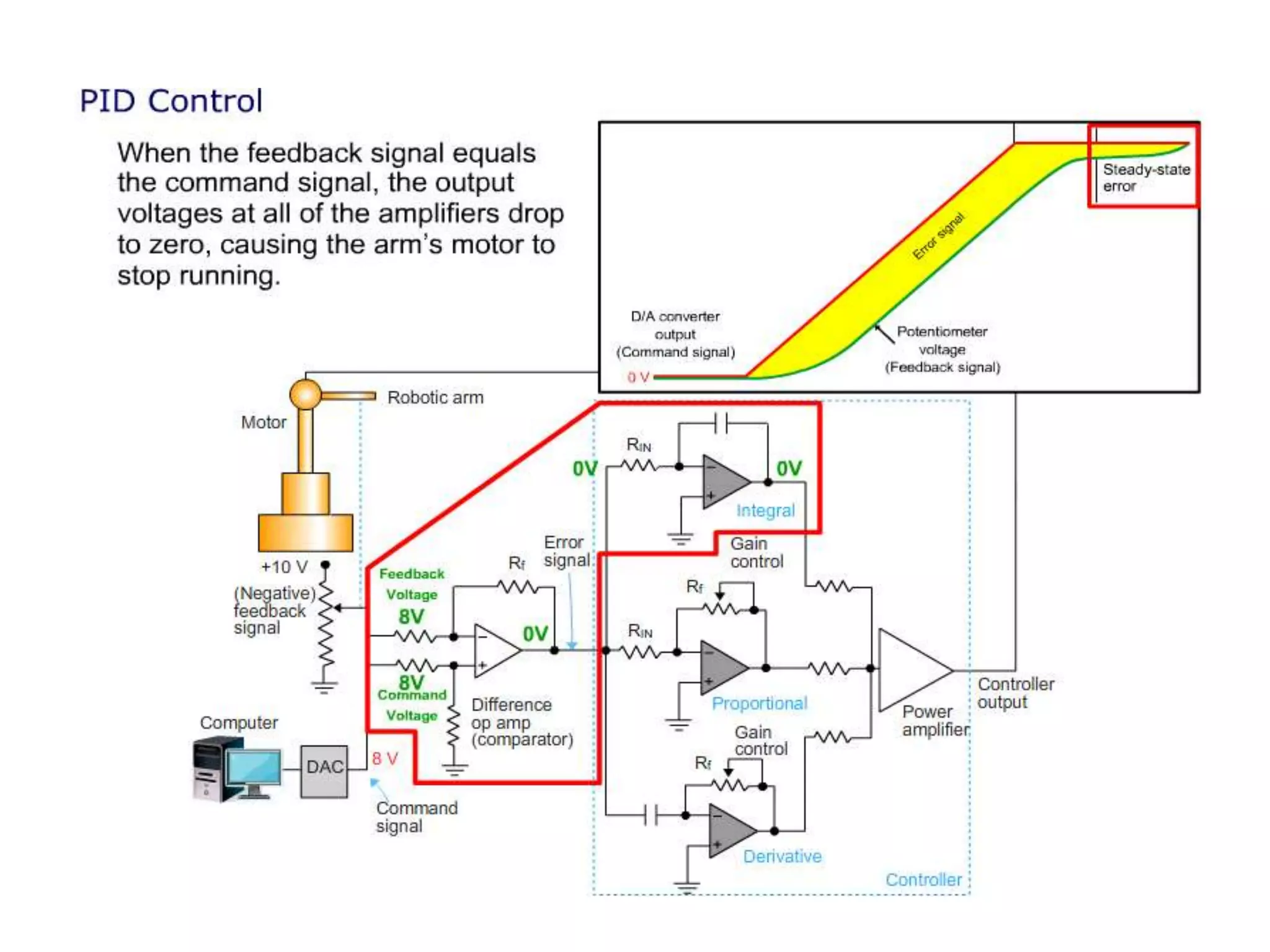
3. Integral (I) control - controller output is proportional to the integral of error over time. Eliminates steady state error but increases response time.
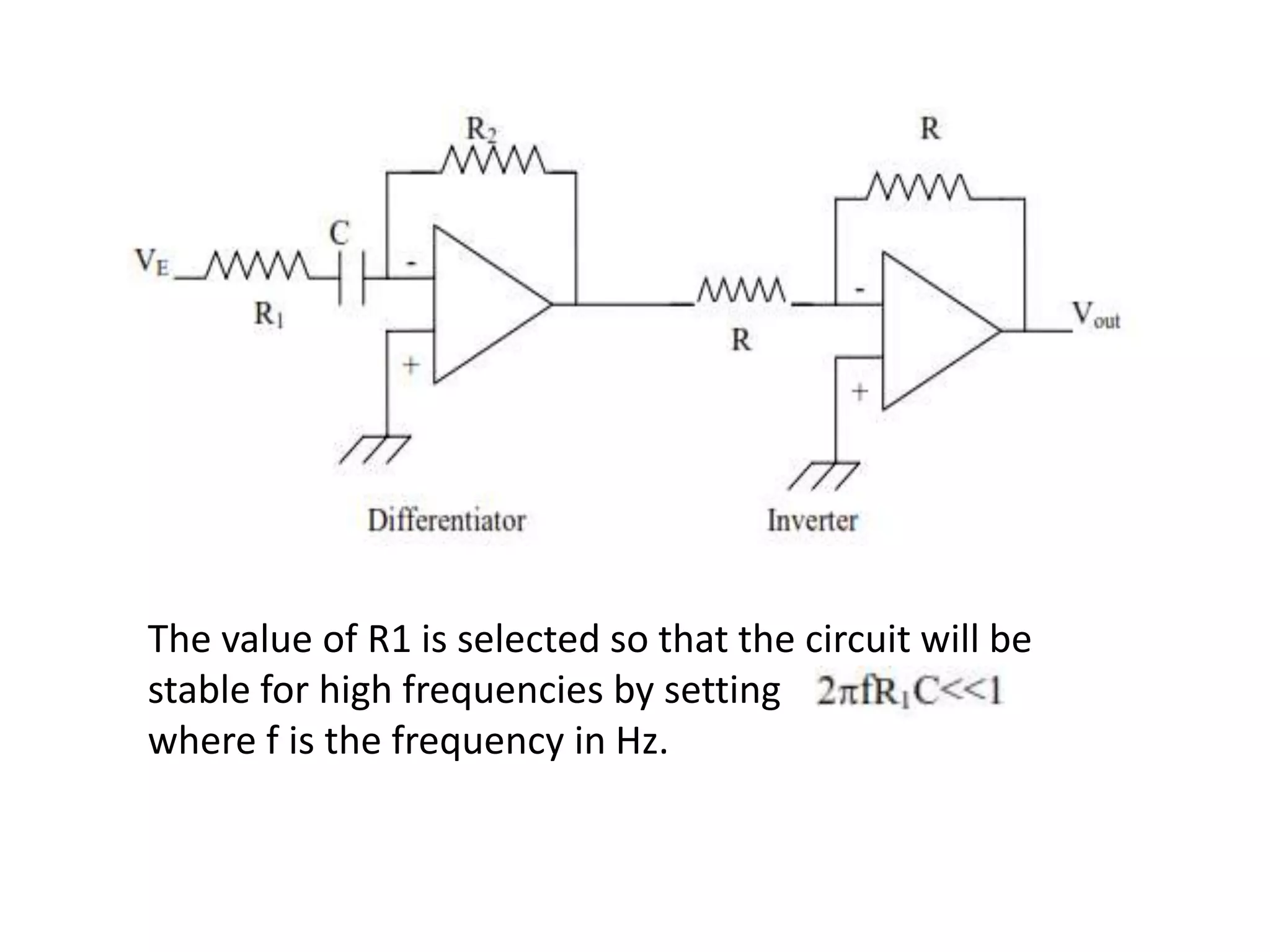
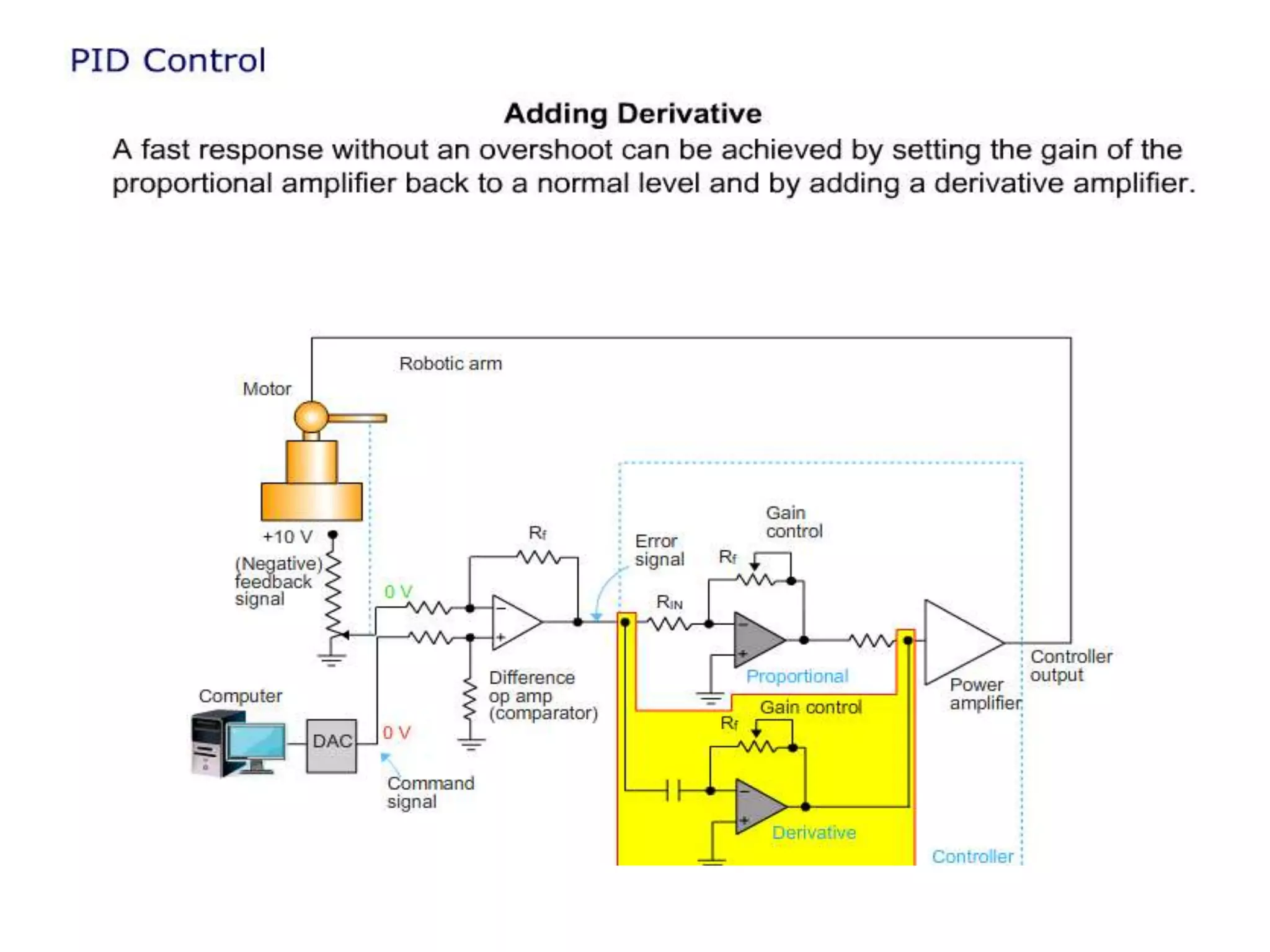
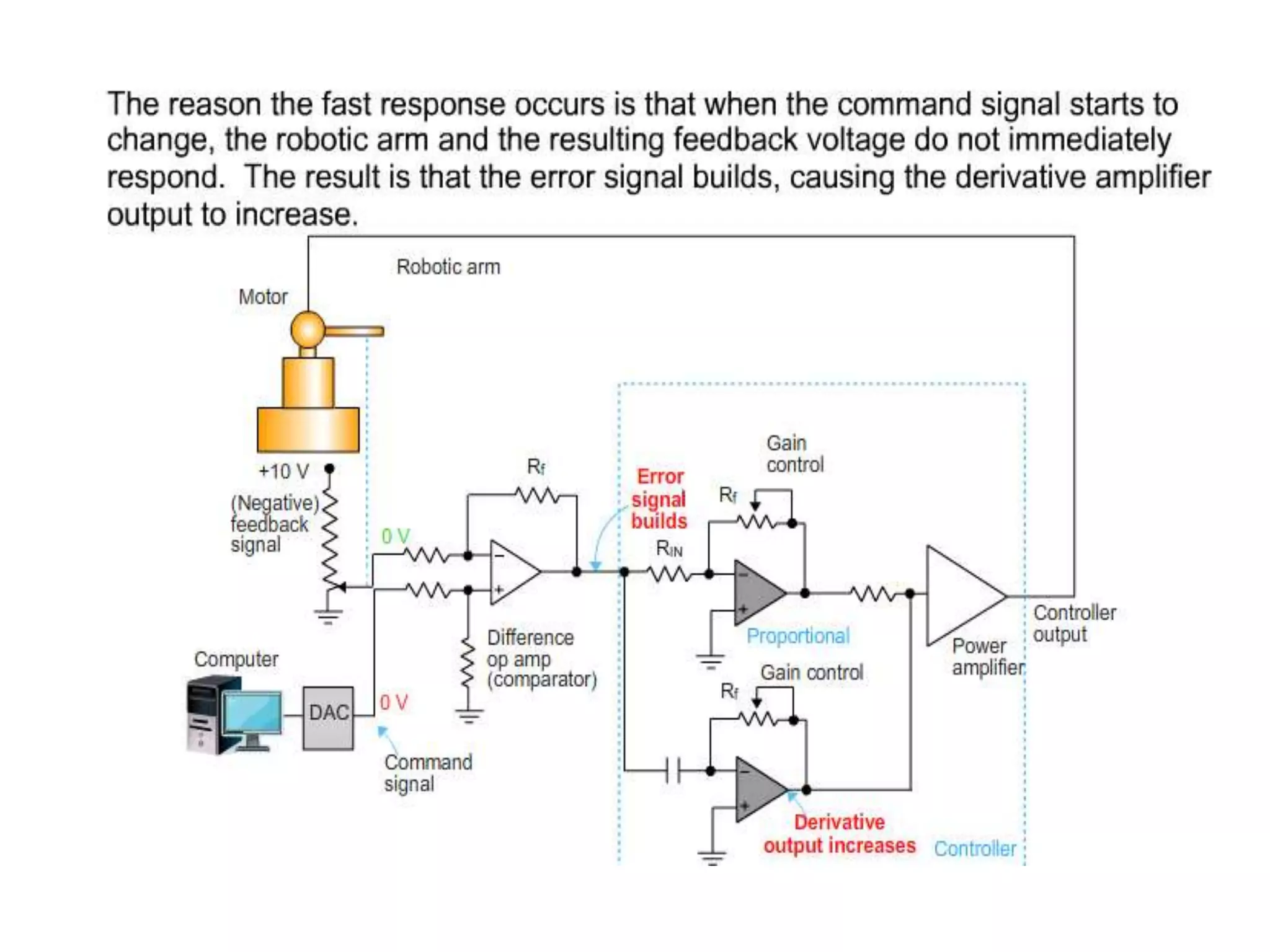
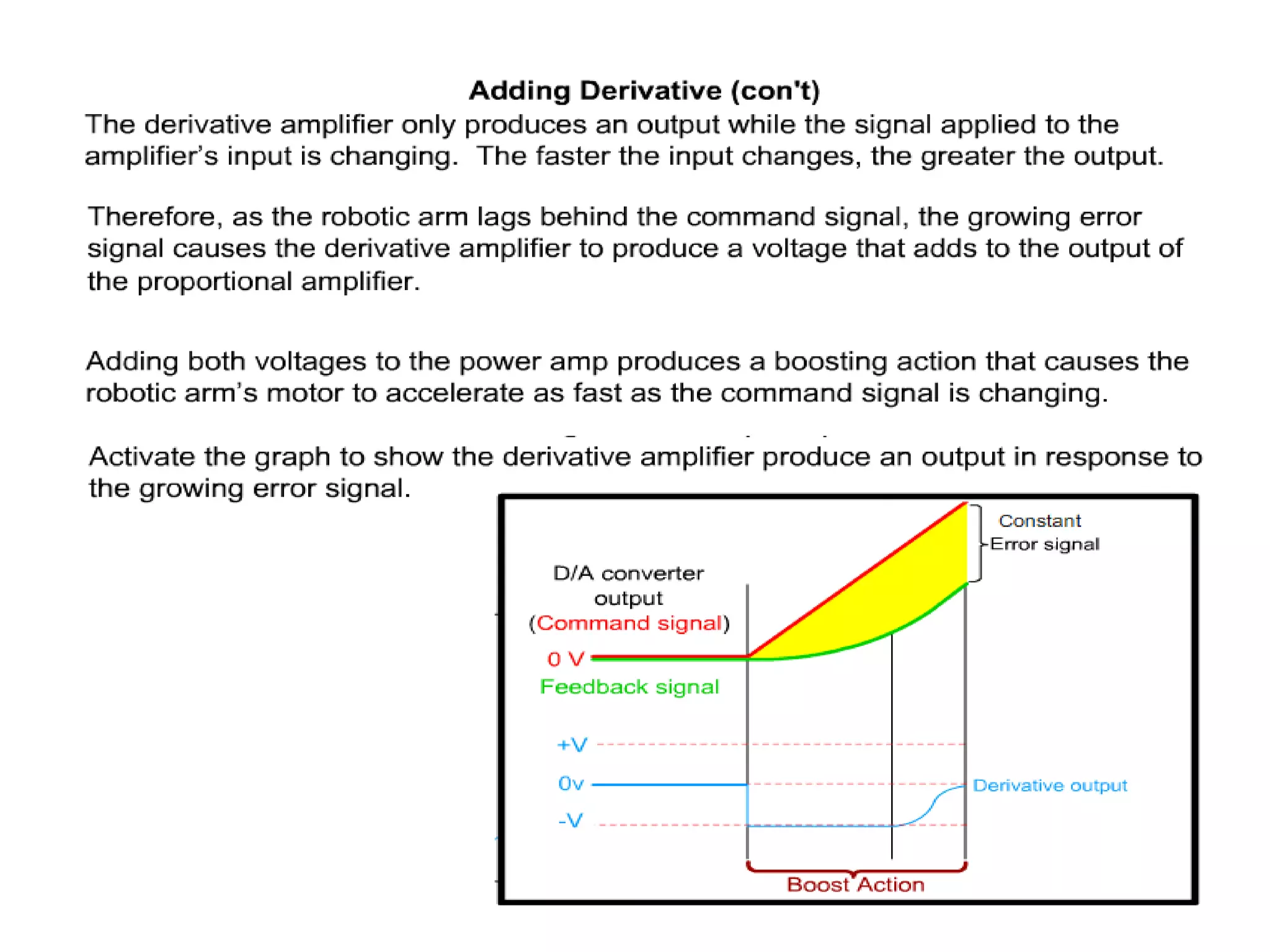
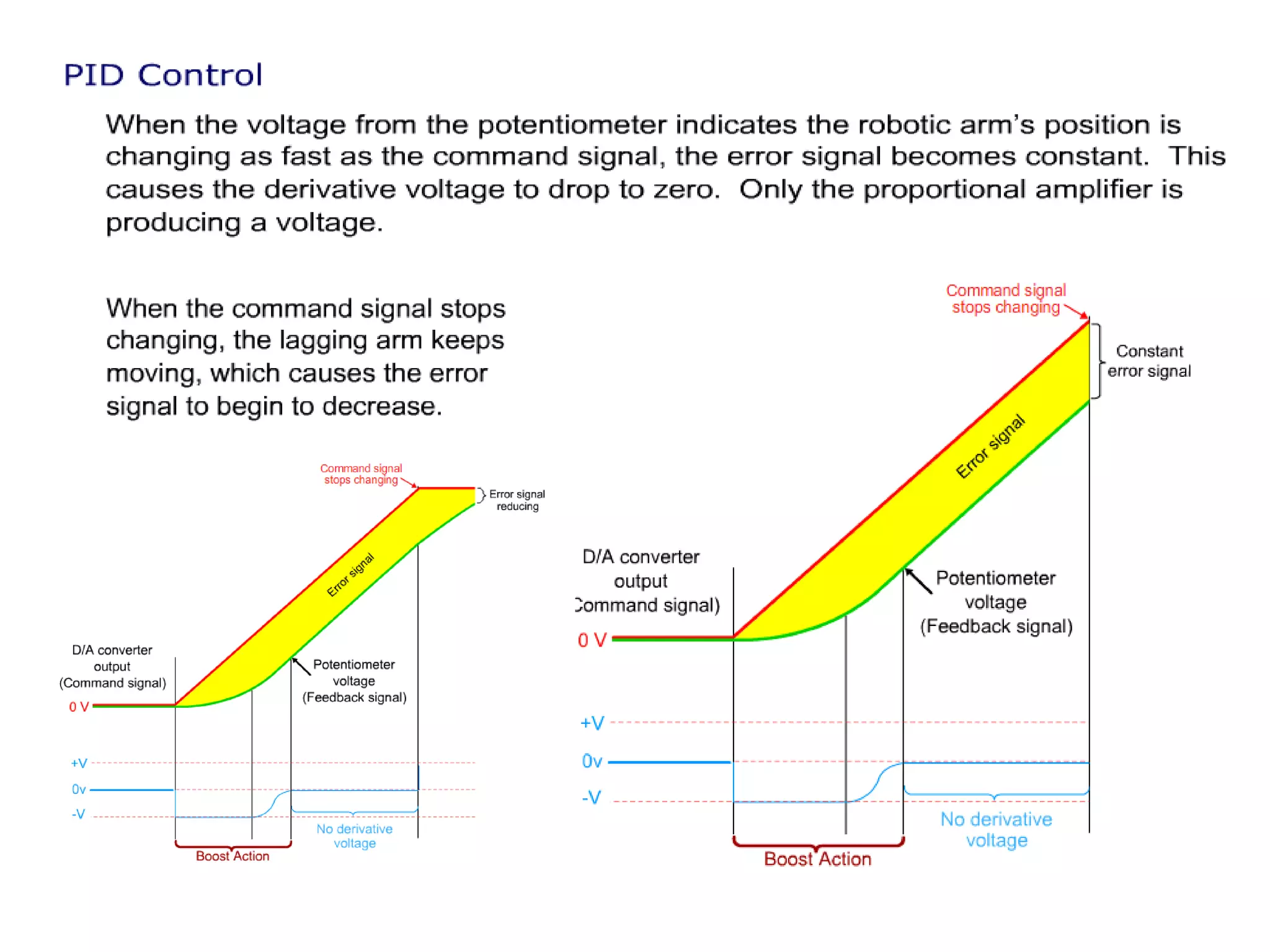
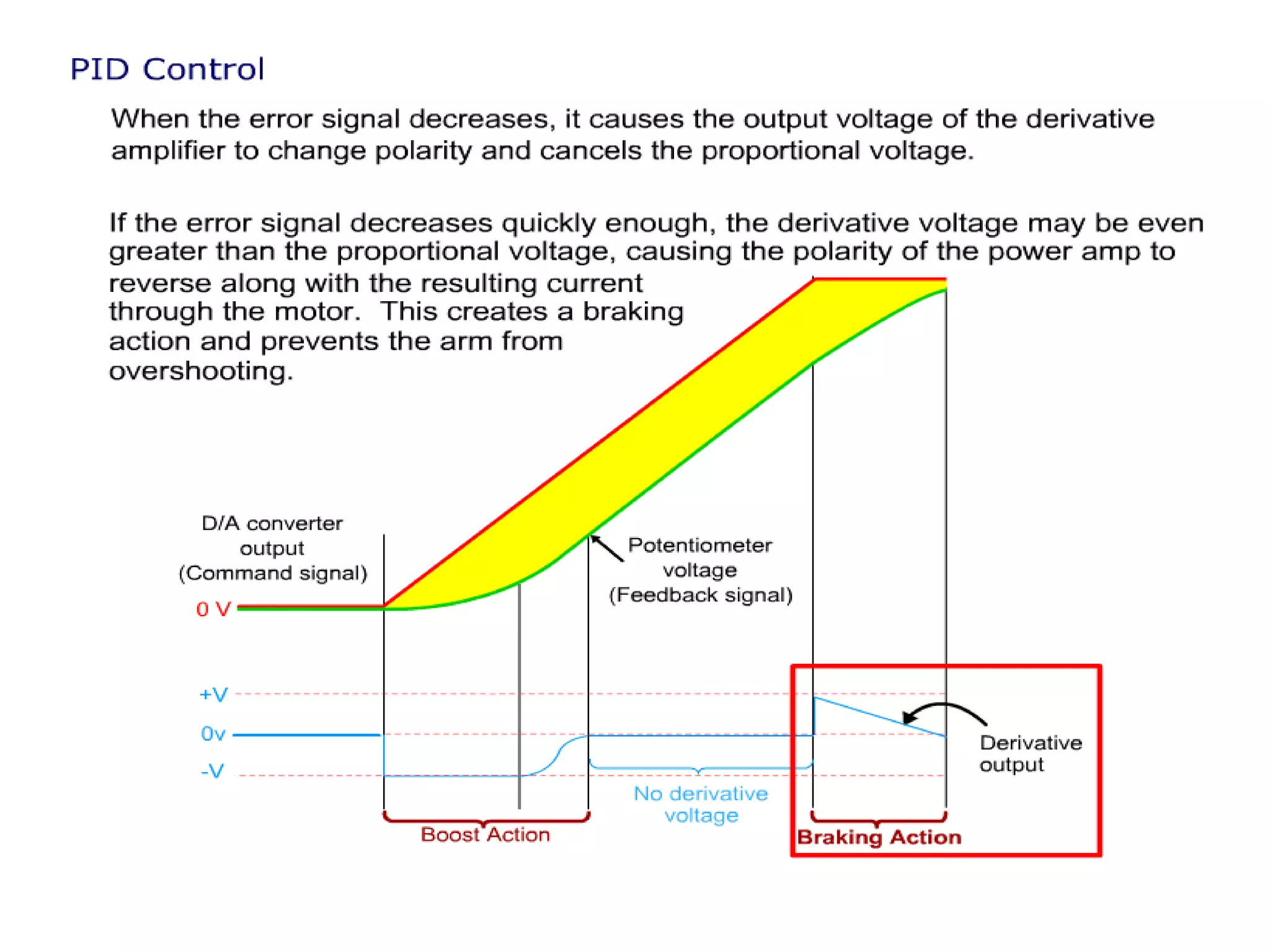
4. Derivative (D) control - controller output is proportional to the rate of change of error. Increases damping but can amplify noise and cause instability.
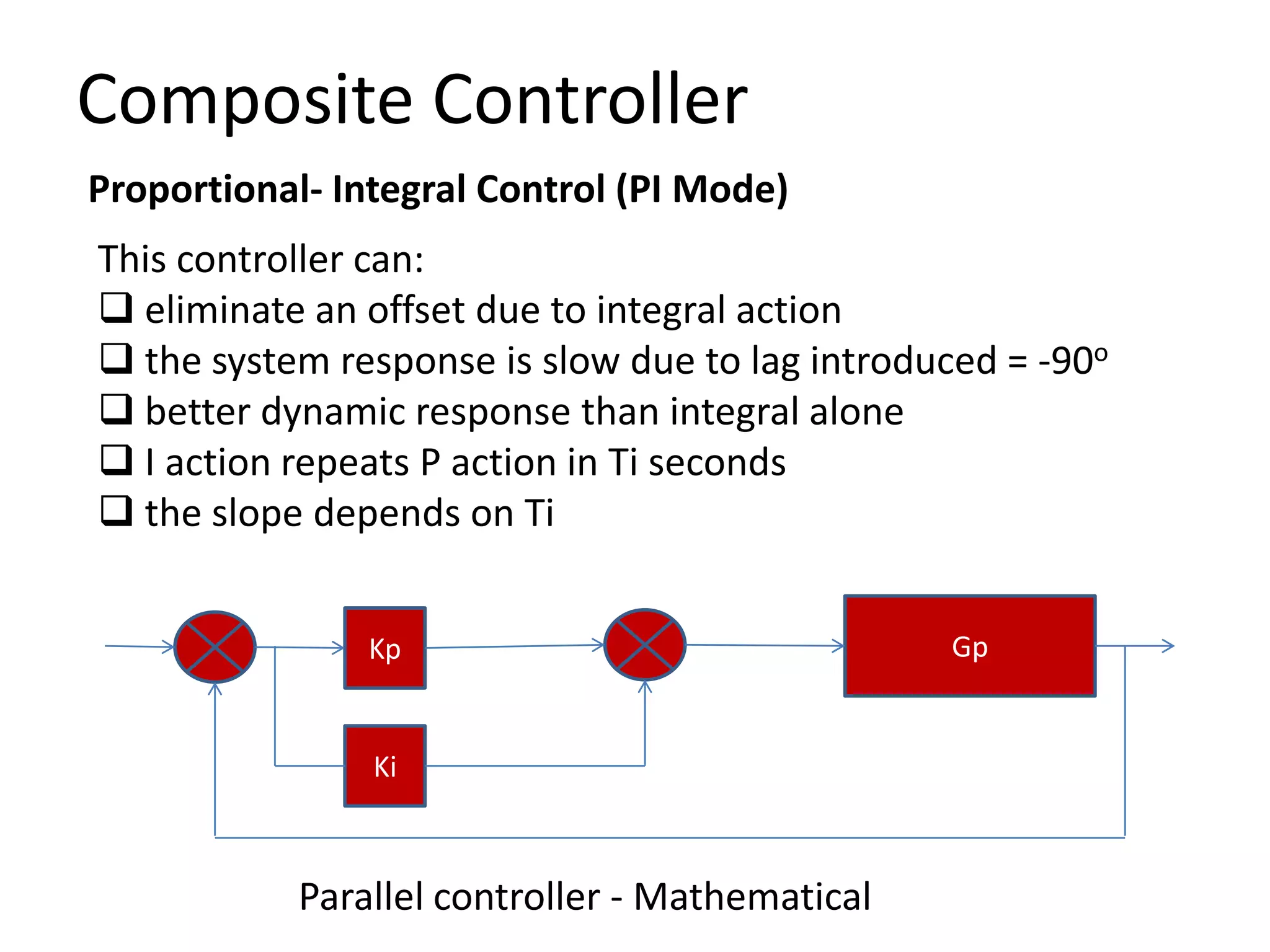
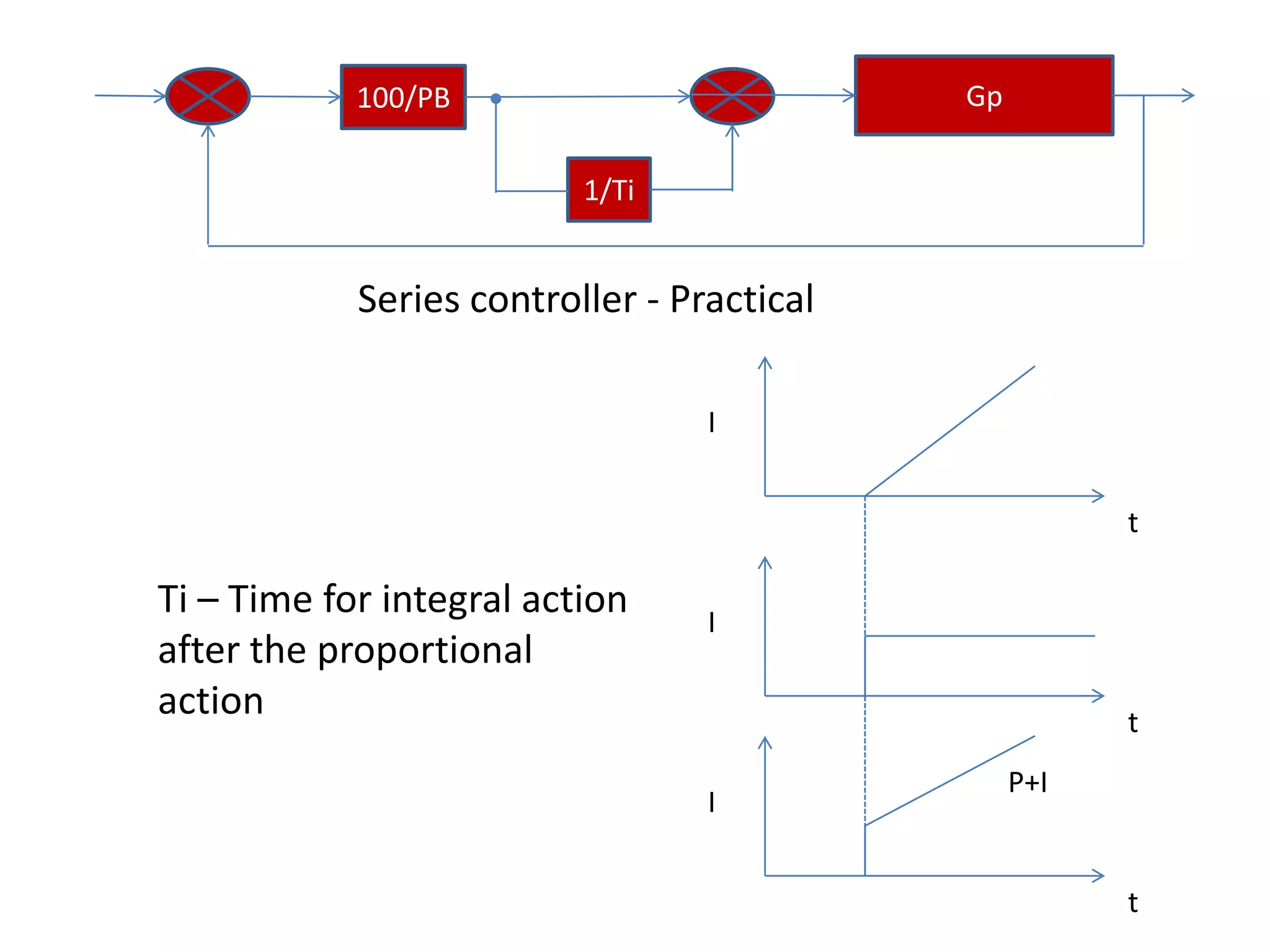
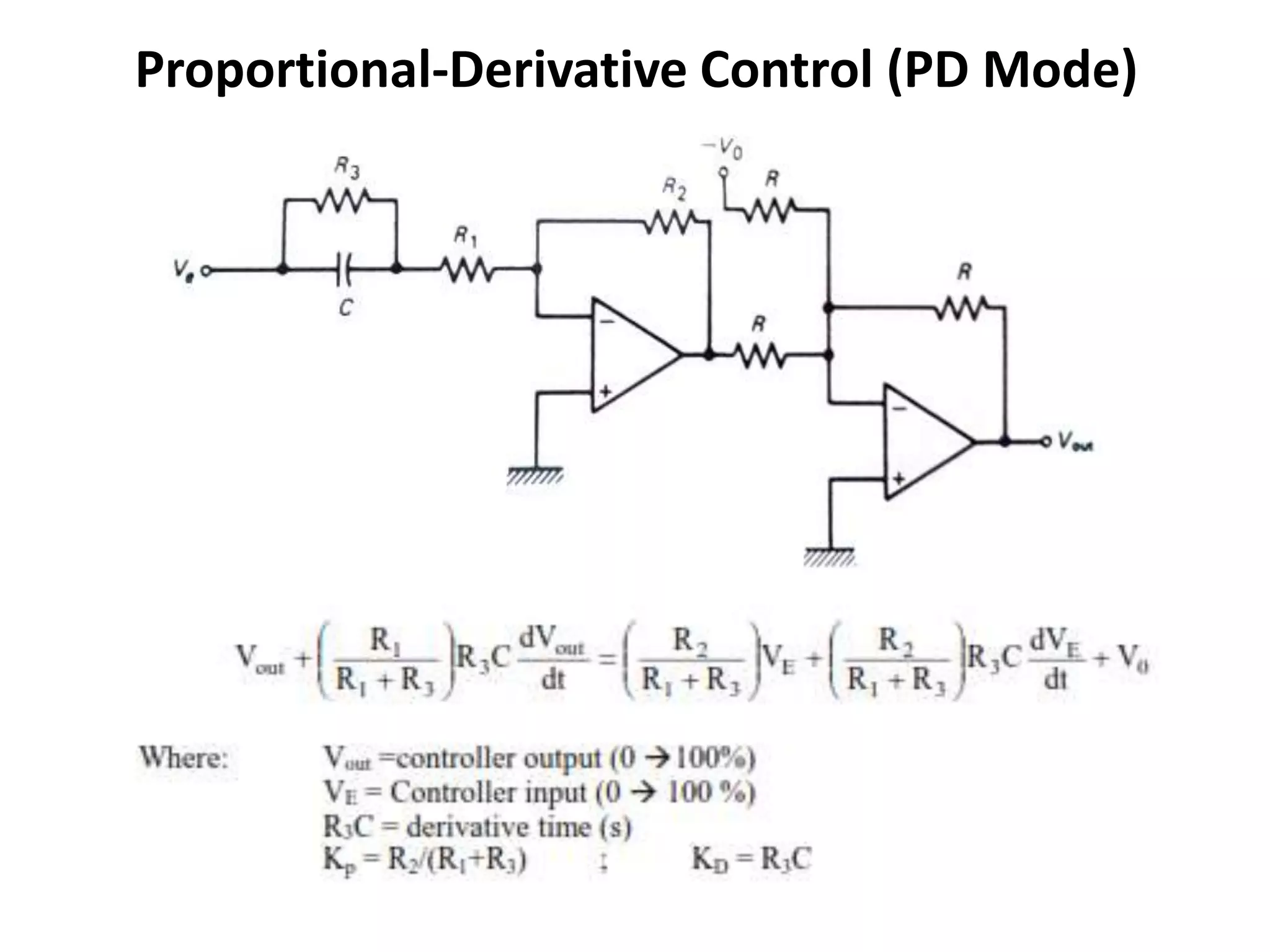
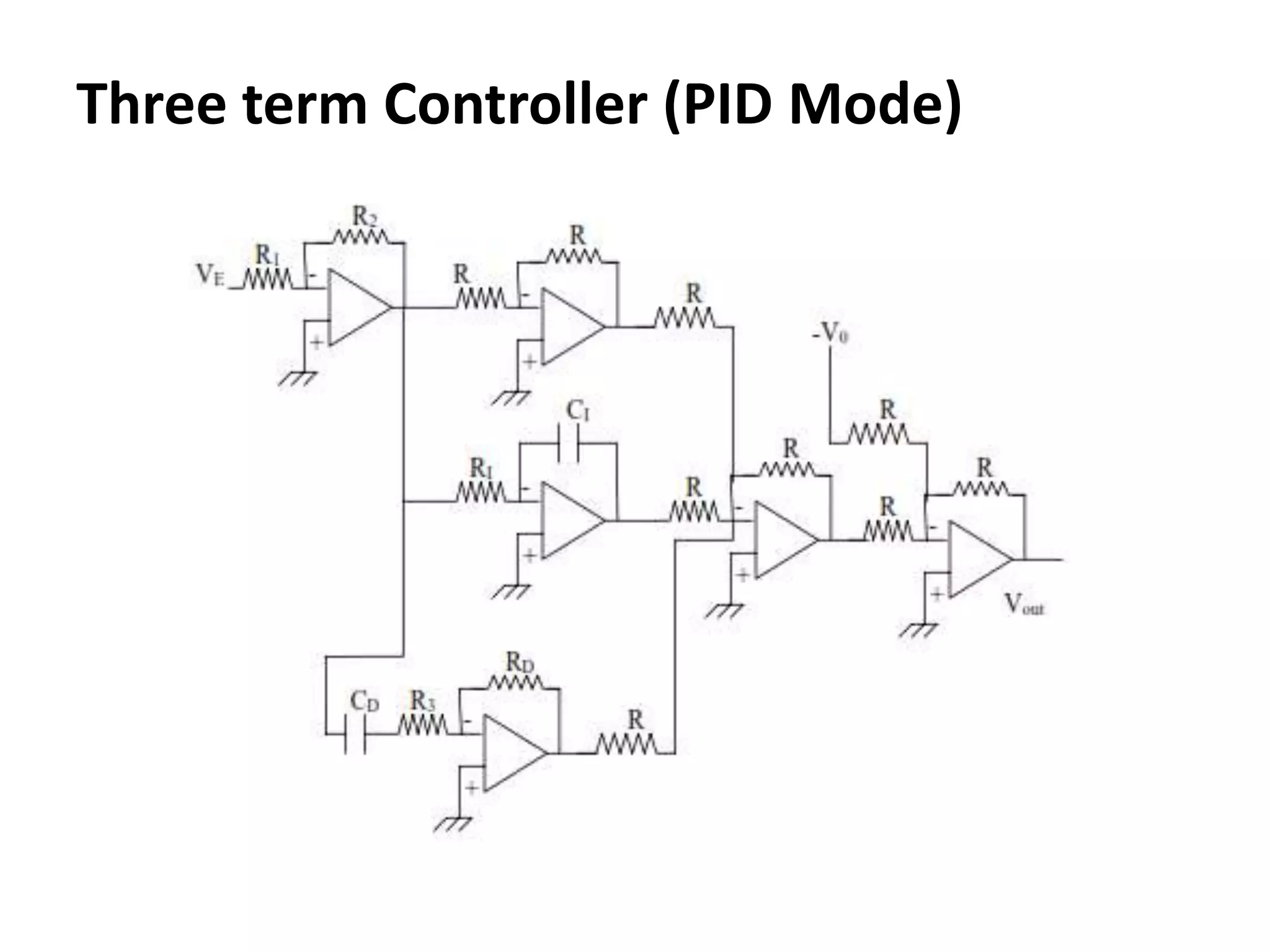
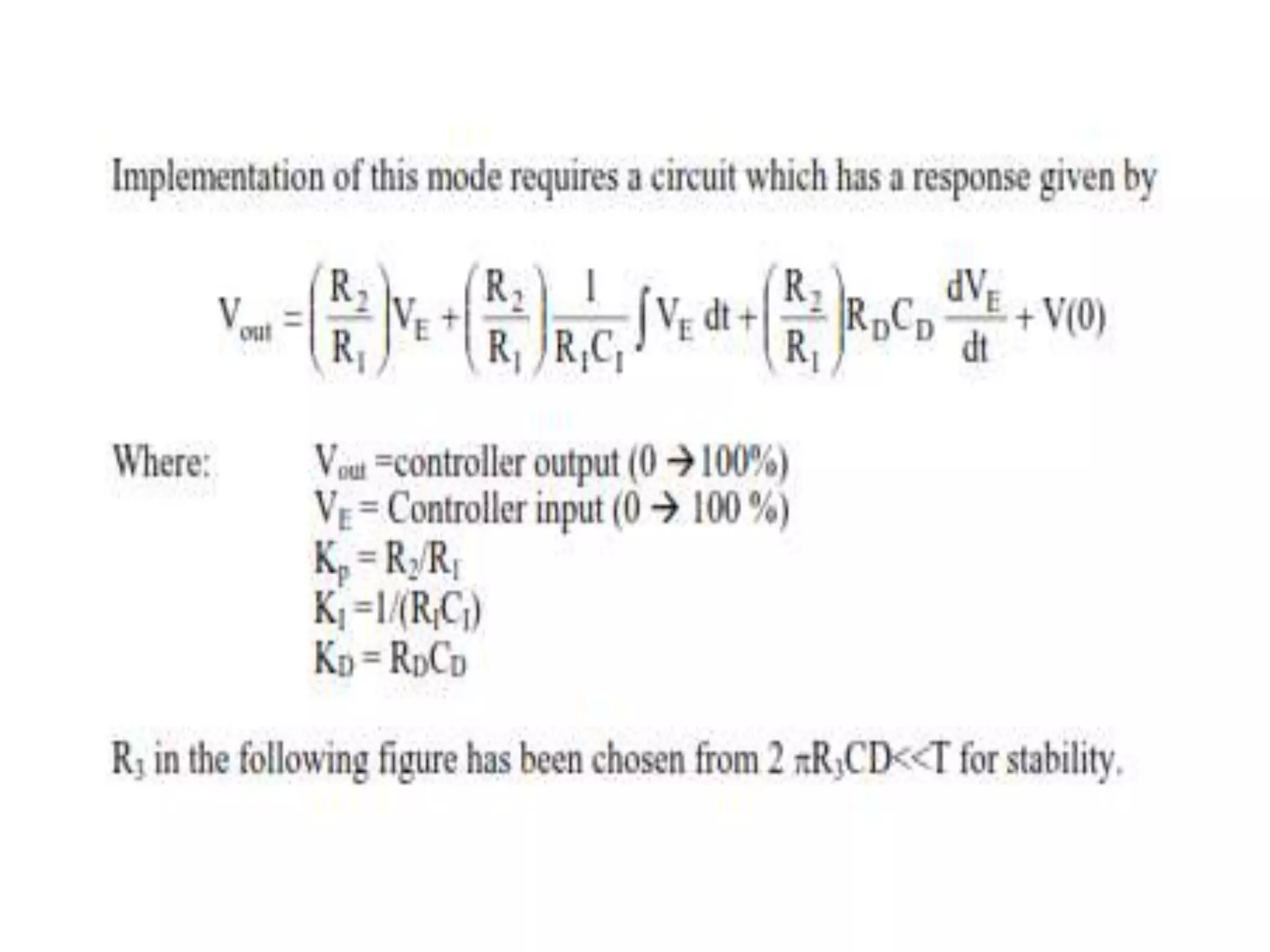
Composite modes like PI, PD, and PID combine the advantages of the individual modes to provide