Downloaded 1,435 times



![ZEIGLER NICHOLS METHOD 9
This method proposed by Ziegler and Nichols is based on experimentally determining the
point of marginal stability.
Formula –
u(t)= Kp [e(t)+Td de(t)/dt+1/Ti ∫e(t)dt]
Procedure –
1- The pid controller is turned into p controller by setting Ti=infinity and Td=0.
2 – The gain Kp is set to zero.
3 – The control loop is closed by setting the controller in automatic mode.
4 - Kp was increased until there are sustained oscillations in the signals in the control system.](https://image.slidesharecdn.com/roni-121121211857-phpapp02/85/Pid-controller-tuning-using-fuzzy-logic-9-320.jpg)
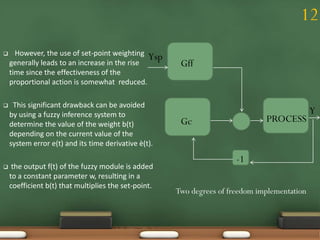
![PID tuning using fuzzy set-point weighting11
Formula - u(t)= Kp [e(t)+Td de(t)/dt+1/Ti ∫e(t)dt]
->Set-point for the proportional action is weighted by means of a constant b <1 .
so we get u(t)= Kpep(t)+Kdde(t)/dt+Ki∫e(t)dt
where ep(t)=bysp(t)—y(t)
-> In this way, a simple two-degree of freedom scheme is implemented .
-> one part of the controller is devoted to the attenuation of load disturbances, and the other
to the set-point following as shown in figure, where the following transfer functions are
indicated:
Gff = Kp [b+1/(sTi)+Td]
Gc = Kp[1+1/(sTi)+Td]](https://image.slidesharecdn.com/roni-121121211857-phpapp02/85/Pid-controller-tuning-using-fuzzy-logic-11-320.jpg)

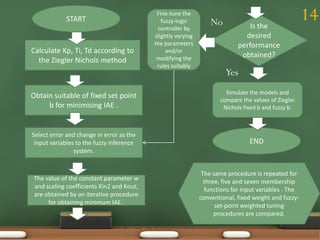


This document provides an overview of tuning a PID controller with fuzzy logic. It introduces fuzzy logic and discusses how it can be applied to PID tuning. Specifically, it discusses using fuzzy set-point weighting to tune the PID controller by determining the proportional weighting factor b(t) using a fuzzy inference system based on the error e(t) and change in error. It also discusses traditional Ziegler-Nichols tuning and compares the performance of fixed versus fuzzy set-point weighting tuning. The conclusion is that fuzzy logic provides benefits like balancing rise time and overshoot to obtain better performance than traditional methods.