Downloaded 1,615 times
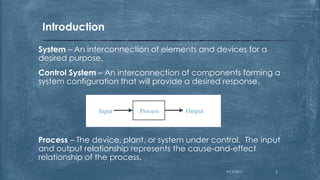
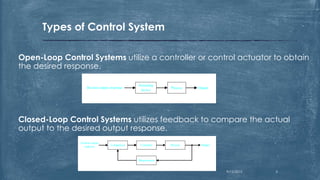
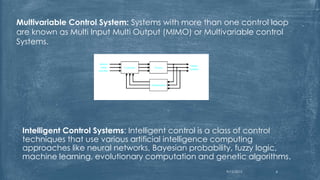
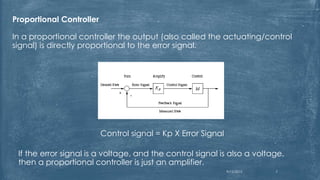
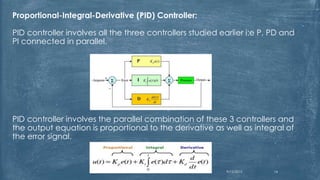


This document discusses different types of control systems and controllers, specifically focusing on PID controllers. It defines key terms like systems, processes, open-loop and closed-loop control. It then describes the different types of controllers - proportional (P), proportional-derivative (PD), proportional-integral (PI), and proportional-integral-derivative (PID). For each controller type, it provides the mathematical equation and discusses the properties and advantages, such as how adding integral control can eliminate steady-state error in PI controllers. Finally, it concludes with tips for designing PID controllers and the effects of increasing individual gains.