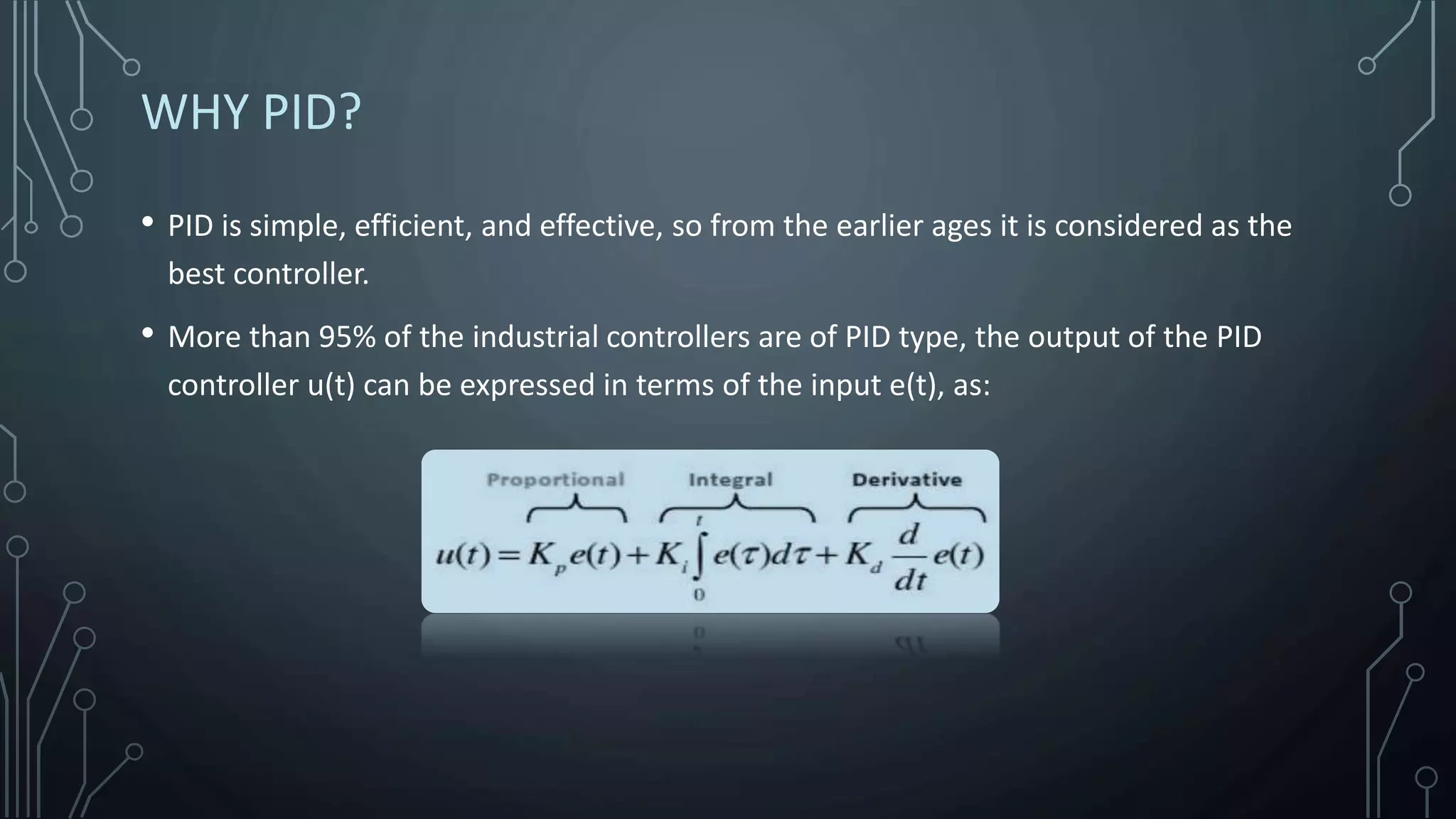
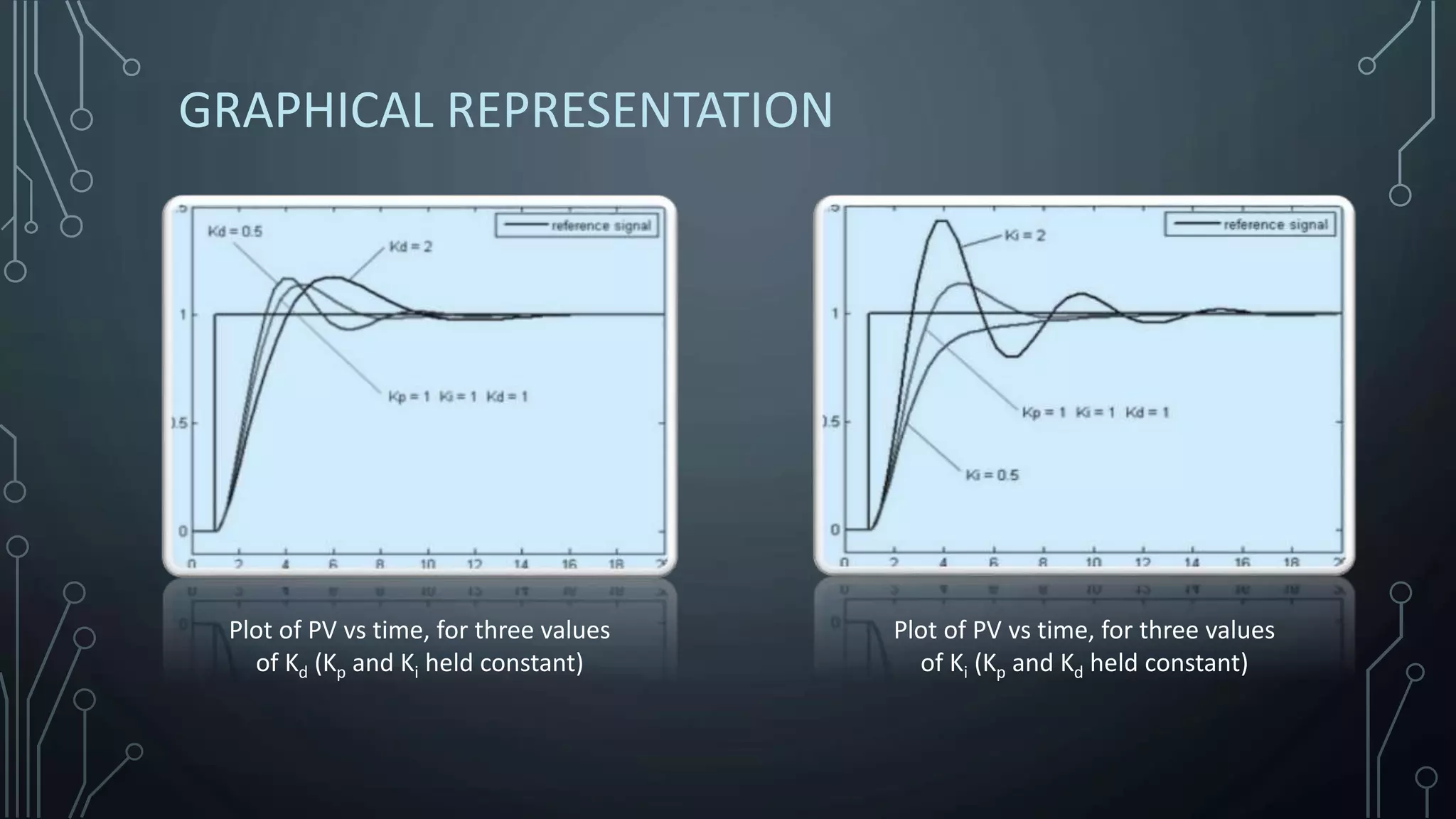
The document explains the concept of PID (Proportional, Integral, Derivative) controllers, emphasizing their role in reducing errors in control systems through feedback mechanisms. It details how each term of the PID controller functions and highlights its widespread industrial application, where over 95% of controllers are of this type. Examples of applications include temperature control, chemical reactors, and automation in various technologies.