This document discusses various types of motor control, including on-off control and PID control. It begins with an overview of closed-loop control using motor feedback via encoders for velocity and position control. The main focus is on introducing PID control in a step-wise manner, first explaining on-off control and then proportional, integral and derivative controllers. It provides the mathematical formulas for these controller types and discusses implementing them in software and tuning the PID parameters.























![2.2 INTEGRAL CONTROLLER CONT.
When using e(t) as the error function, the
formula for the PI controller is:
R(t) = KP · [ e(t) + 1/TI · 0∫ t e(t)dt ]
We rewrite this formula by substituting
QI = KP/TI, so we receive independent
additive terms for P and I:
R(t) = KP · e(t) + QI · 0∫ t e(t)dt](https://image.slidesharecdn.com/5-140709124838-phpapp01/85/Control-28-320.jpg)






![2.3 DERIVATIVE CONTROLLER
CONT.
When using e(t) as the error function, the formula for
a combined PD controller
is:
R(t) = KP · [ e(t) +TD · de(t)/dt]
The formula for the full PID controller is:
R(t) = KP · [ e(t) + 1/TI · 0 ∫ t e(t)dt +TD · de(t)/dt ]](https://image.slidesharecdn.com/5-140709124838-phpapp01/85/Control-36-320.jpg)

![2.4 PID PARAMETER TUNING
The tuning of the three PID parameters KP, KI, and KD is
an important issue.The following guidelines can be used
for experimentally finding suitable values (adapted after
[Williams 2006]):
1. Select a typical operating setting for the desired
speed, turn off integral and derivative parts, then
increase KP to maximum or until oscillation occurs.](https://image.slidesharecdn.com/5-140709124838-phpapp01/85/Control-38-320.jpg)














![4- MULTIPLE MOTORS – DRIVING
STRAIGHT CONT.
There are a number of different approaches for driving
straight.The idea presented in the following is from
[Jones, Flynn, Seiger 1999]. Figure 5.14
shows the first try for a differential drive vehicle to drive
in a straight line.There are two separate control loops
for the left and the right motor, each
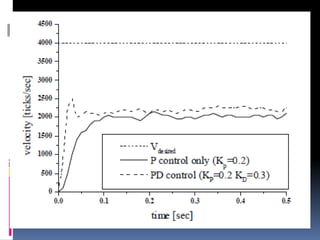
involving feedback control via a P controller. The
desired forward speed is supplied to both controllers .
Unfortunately, this design will not produce a nice
straight line of driving.](https://image.slidesharecdn.com/5-140709124838-phpapp01/85/Control-53-320.jpg)




























![5. feedback control[1]](https://cdn.slidesharecdn.com/ss_thumbnails/5-feedbackcontrol1-110603210035-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
















































