Downloaded 565 times
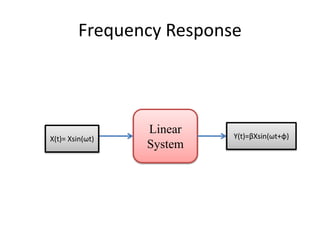
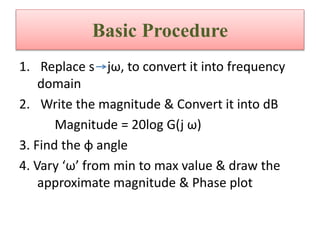
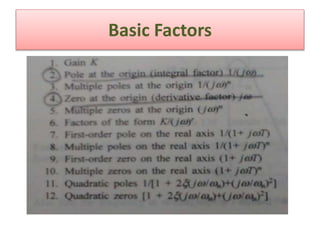
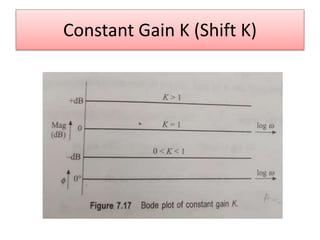
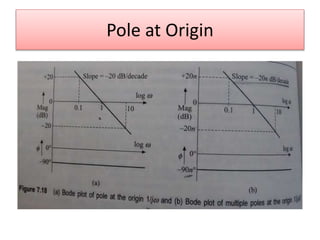
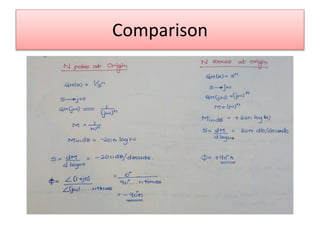
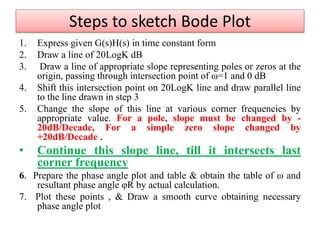
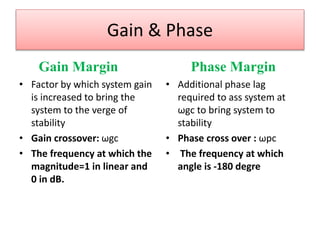
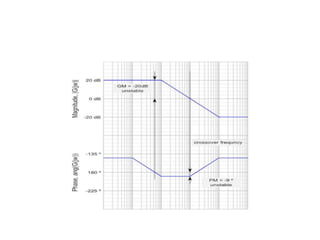
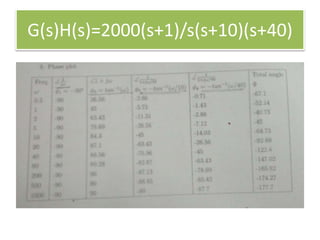
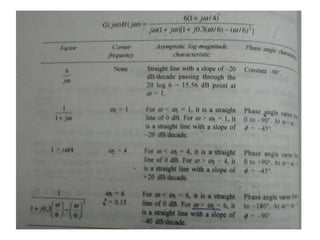

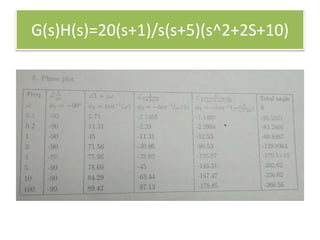

This document discusses frequency domain analysis and creating Bode plots. Frequency domain analysis examines a system's frequency response by using sinusoidal inputs rather than impulse inputs used in time domain analysis. A Bode plot graphs the magnitude and phase of a system's frequency response on logarithmic and linear scales. It can be used to determine stability margins like gain margin and phase margin. The document provides steps for sketching a Bode plot from a transfer function including identifying poles, zeros and gain. Key aspects of a Bode plot like bandwidth, resonant frequency and cut-off frequency are also defined. Examples of Bode plots for two transfer functions are included.

































![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Circuit Network Analysis - [Chapter4] Laplace Transform](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613063858-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)