Downloaded 1,524 times







![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
D. PERSAMAAN LAGRANGE
Untuk mencari persamaan diferensial gerak sebuah
benda yang dinyatakan dalam koordinat rampatan, kita dapat
memulai dengan persamaan berikut:
Fi = m i i
x (21)
dan selanjutnya kita akan mencoba menyatakan persamaan
tersebut dalam q. Pendekatan pertama yang akan kita pakai
adalah dari persamaan energi. Kita akan menghitung energi
kinetik T dalam bentuk koordinat Kartesian dan selanjutnya
kita akan nyatakan dalam koordinat rampatan dan turunannya
terhadap waktu. Energi kinetik T dari sebuah sistem yang
mengandung N partikel dapat dinyatakan dengan
∑[ ]
k
T= 1
2
m i ( x 1 + y i2 + z i2
2 (22)
i =1
atau dalam bentuk yang lebih ringkas ditulis sebagai berikut
3N
T= ∑ i =1
1
2
m i x i2
(23)
Mari kita mencoba menyatakan hubungan antara koordinat x
dan q yang juga mengandung waktu t secara eksplisit. Kita
dapat misalkan
x i = x i ( q 1 , q 2 ,..., q n , t )
(24)
dan selanjutnya](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-8-320.jpg)















![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
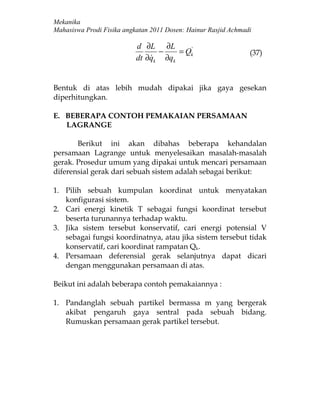
Gambar 2.4.
Gerak pada kawat melingkar
Perhatikan gambar di atas. C adalah pusat lingkaran
kawat. Diameter OA membentuk sudut φ = ωt dengan sumbu-
X, sedangkan benda bermassa m membentuk sudut θ dengan
diameter OA. Jika yang kita perhatikan hanyalah gerak benda
bermassa m saja, maka sistim yang kita tinjau memiliki satu
derajat kebebasan, oleh karena itu hanya koordinat rampatan q
= θ yang dipakai. Berdasarkan gambar 2.4 a dan 2.4 b, kita
dapat tuliskan:
x = a cos ωt + a cos(ωt + θ)
y = a sin ωt + a sin(ωt + θ)
x = −aω sin ωt − a [ sin(ωt + θ)] (ωt + θ)
y = aω cos ωt + a[ cos(ωt + θ)] (ωt + θ)
Kuadratkan persamaan-persamaan di atas, kemudian
jumlahkan akan diperoleh besaran energi kinetik :
2
2
[ (2
) ( )
T = 1 m( x 2 + y 2 ) = 1 ma 2 ω 2 + θ + ω + 2ω θ + ω cos θ ]
∂T
(
= ma 2 θ + ω + ω cos θ )
∂θ
dan
d ∂T
dt ∂θ
2
θ (
= ma − ωθ sin θ
)
27](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-27-320.jpg)

![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
digunakan untuk menghitung kecepatan dan posisi benda
bermassa m.
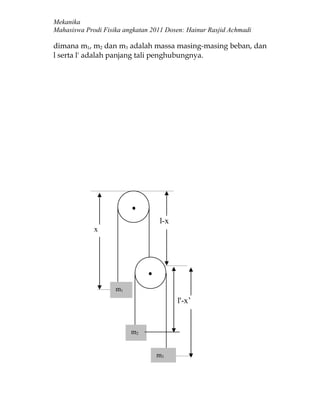
b.Untuk menghitung reaksi kawat, kita mesti melihat
pergeseran virtual massa m dalam suatu arah yang tegaklurus
pada kawat. Untuk maksud tersebut, kita anggap bahwa jarak
CB sama dengan jarak r (merupakan variabel dan bukan
tetapan), seperti yang ditunjukkan pada gambar 2.4 c. Maka
dalam hal ini terdapat dua derajat kebebasan dan dua
koordinat rampatan, yakni r dan θ. Dari gambar nampak
bahwa:
x = a cos ωt + r cos(ωt +θ )
y = a sin ωt + r sin(ωt +θ )
(
x = − aω sin ω t + r cos ( ωt + θ ) − r [ sin( ωt + θ ) ] ω + θ )
(
y = aω cos ω t + r sin( ωt + θ ) + r [ cos( ωt + θ ) ] ω + θ )
m( x 2 + y 2 )
1
T =
2
1
2
[ (
= m a 2ω 2 + r 2 + r 2 θ + ω ) 2
( )
+ 2aω r sin θ + 2aω r θ + ω cos θ
]
d ∂T ∂T
∂ r − ∂ r = Qr
dt
Dimana Qr = R adalah gaya reaksi. Nilai dari ∂ ∂ dan
T r
∂ ∂ diperoleh dari persamaan (i) dan jika disubstitusi ke
T r
persamaan (ii), didapatkan :
29](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-29-320.jpg)
![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
[ (
R = m + aωθ cos θ − r θ + ω
r ) 2
( )
− aω θ + ω cos θ ]
r =a , r =0 ,
dan = 0
r
[ (
R = − ma ω 2 cos θ + θ + ω ) 2
]
yang merupakan persamaan yang menyatakan reaksi kawat .
9. Bahaslah gerak sebuah partikel dengan massa m yang
bergerak pada bidang sebuah kerucut dengan sudut setengah
puncak (half-angle) φ (lihat Gambar 2.5) dimana gaya yang
bekerja hanyalah yang disebabkan oleh gaya gravitasi saja.](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-30-320.jpg)

![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
menggunakan persamaan pembatas diatas. Energi kinetik
massa m adalah :
T =
1
2
1
2
[
1
2
] [ ( )
mv 2 = m r 2 + r 2θ 2 + z 2 = m r 2 1 + cot 2 φ + r 2θ 2 ]
=
1
2
(
m r 2 csc 2 φ + r 2θ 2
)
atau
Energi potensial massa m (anggap V = 0 dan z = 0) :
V = mgz = mgr cot φ
Kemudian Lagrangian L sistem :
1
2
( )
L = T − V = m r 2 csc 2 φ + r 2θ 2 − mgr cot φ
Persamaan Lagrange untuk koordinat r adalah :
d ∂L ∂L
∂ r − ∂r = 0
dt
Dengan memasukkan nilai L, diperoleh :
∂L d ∂L ∂L
= mr csc 2 φ ,
∂r = m csc φ , ∂r = mrθ − mg cot φ
r 2 2
∂r
dt
Substitusi nilai ini ke persamaan (*), diperoleh :
− rθ 2 sin 2 φ + g cos φ sin φ = 0
r
Ini adalah persamaan gerak untuk koordinat r.
Persamaan Lagrange untuk koordinat θ adalah :](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-32-320.jpg)







![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
Dengan persamaan di atas, kita dapat nyatakan fungsi H yang
bersesuaian dengan variasi δp k , δq k sebagai berikut :
∂L ∂L
δH = ∑p δq
k
k k + q k δp k −
∂q k
δq k −
∂q k
δq k
(101)
Suku pertama dan suku kedua yang ada dalam tanda kurung
saling meniadakan, oleh karena menurut defenisi
p k = ∂L / ∂q k , oleh karena itu:
δH = ∑[qδp
k
k − p k δq k ]
(102)
Variasi fungsi H selanjutnya dapat dinyatakan dalam
persamaan berikut :
∂H ∂H
δH = ∑ ∂p
k k
δp k +
∂q k
δq k
(103)
Akhirnya diperoleh :
∂H (104)
= qk
∂p k
∂H
= −p k
(105)
∂q k
Dua persamaan terakhir ini dikenal dengan persamaan kanonik
Hamilton untuk gerak. Persamaan-persamaan ini terdiri dari 2n
41](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-41-320.jpg)




![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
[
Fx = q E x + q y B z − z B y
]
(123)
Menurut teori elektromagnet, fungsi potensial suatu
medan elektromagnet terdiri dari dua bagian berikut :
Potensial skalar Ф dan potensial vektor A
Masing-masing besaran itu berkait dengan kuat medan E dan
induksi magnetik B melalui hubungan :
∂A
E = −∇Φ −
∂t
B = ∇× A (124)
Jika medan tak bergantung waktu, maka :
E = −∇ Φ dan B ≡ ∇×A (125)
Medan E tidak terkait dengan B.
Perhatikanlah suatu fungsi U yang diungkapkan sebagai :
U ≡ q Φ( r , t ) − q [ v •A ( r , t ) ]
(126)
Fungsi ini tak lain adalah fungsi potensial suatu zarah
bermuatan dalam suatu medan elektromagnetik. Fungsi U
tersebut dapat ditulis sebagai :](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-46-320.jpg)
![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
[
U ≡ q Φ − q x Ax + y Ay + z Az
]
(127)
Perkalikanlah sekarang bagaimana bentuk fungsi
∂U d ∂U
− + (128)
∂x dt ∂x
Yang diperoleh dengan mendiferensiasi persamaan (127) ke x,
ke x , dan kemudian ke t. Dua yang pertama secara parsial.
Diferensiasi U secara parsial ke x, memberikan :
∂U ∂Φ ∂Ax ∂Ay ∂Az
− = −q + q x
∂x +y
+z
∂x ∂x ∂x ∂x
(129)
Diferensiasi U secara parsial ke x , memberikan :
∂U
= −q A x
∂x
(130)
Diferensiasi persamaan i ke t, menghasilkan :
∂U ∂U ∂Ax ∂Ax ∂Ax ∂Ax (131)
= −q
∂t + ∂x x + ∂ y y + ∂z z
∂t ∂x
Sehingga bentuk persamaan 128 menjadi :
47](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-47-320.jpg)


![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
Berdasarkan pembahasan di atas dapat diambil suatu
kesimpulan bahwa, jika U merupakan fungsi potensial skalar
yang bergantung pada kecepatan zarah v yang ditandai oleh
hubungan gaya rampatan
∂U ∂ ∂U
Qk = + (140)
∂q k ∂t ∂q k
maka persaman Lagrange untuk sistem mekanika yang
dikuasai oleh U memiliki bentuk
d ∂T ∂L
−
∂q = 0 (141)
dt ∂q k
k
dengan fungsi Lagrange L = T - U
Untuk memecahkan persoalan apakah fungsi Lagrange di atas
dapat dipergunakan untuk menyelesaikan persamaan gerak
zarah dalam medan elektromegnetik, tinjaulah sebuah fungsi
potensial sebagaimana persamaan 127 seperti berikut:
[
U ≡ q Φ − q x Ax + y Ay + z Az
]
Untuk komponen gaya ke arah x berlaku :
∂U ∂ ∂U
Fx = − +
∂x ∂t ∂x
(142)](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-50-320.jpg)
![Mekanika
Mahasiswa Prodi Fisika angkatan 2011 Dosen: Hainur Rasjid Achmadi
Dengan penalaran yang sama, juga dapat dilakukan untuk
komponen Fy dan Fz. Jadi dengan demikian fungsi Lagrange
yang dimaksud dalam hal ini adalah :
1
L= Mv ⋅ v - qΦ(r , t) + v ⋅ A (r, t)q (143)
2
dimana m dan q masing-masing adalah massa dan muatan
zarah, v adalah kecepatan zarah, dan Ф (r,t) serta A(r,t)
masing-masing adalah potensial skalar dan potensial vektor
medan elektromagnetik.
Contoh :
1
1. Tunjukkan bahwa A = ( B × r ) merupakan vektor
2
potensial untuk suatu medan dengan induksi magnetik
B.
Jawab :
∇×A = 1 ∇×A
2
= 2 { B( ∇ ⋅ r ) − r ( ∇ ⋅ B ) + ( r ⋅ ∇ ) B − ( B ⋅ ∇ ) r}
1
Diketahui bahwa ∇ ⋅ r = 3 . Jadi suku pertama adalah
3B.
)
(B ⋅ ∇ = B x
∂
∂x
+B y
∂
∂y
+B z
∂ ˆ
∂
z
j (
⋅ i x + ˆ y +kz
ˆ ) =B
Sehingga :
∇×A = 1
2
[ 2B − ( r ⋅ ∇ ) B]
51](https://image.slidesharecdn.com/persamaanlagrangedanhamilton-121030014730-phpapp01/85/Persamaan-lagrange-dan-hamilton-51-320.jpg)







Dokumen ini membahas persamaan Lagrange dan Hamilton dalam mekanika, yang menawarkan pendekatan lebih efisien untuk menganalisis gerak benda dibandingkan dengan hukum Newton, terutama dalam sistem dengan koordinat yang kompleks. Penjelasan ini mencakup penggunaan koordinat rampatan, gaya rampatan, dan persamaan untuk sistem konservatif, serta penerapan fungsi Lagrangian. Contoh-contoh aplikatif juga disertakan untuk menunjukkan kehandalan metode ini dalam menyelesaikan masalah gerak.




























































![Modul Ajar KBC Fikih Kelas 2 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcfikihkelas2mimodulkelas-260129153051-998e7c8f-thumbnail.jpg?width=640&height=640&fit=bounds)

![Modul Ajar KBC SKI Kelas 3 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcskikelas3mimodulkelas-260130161838-4934e483-thumbnail.jpg?width=640&height=640&fit=bounds)




