Downloaded 14 times
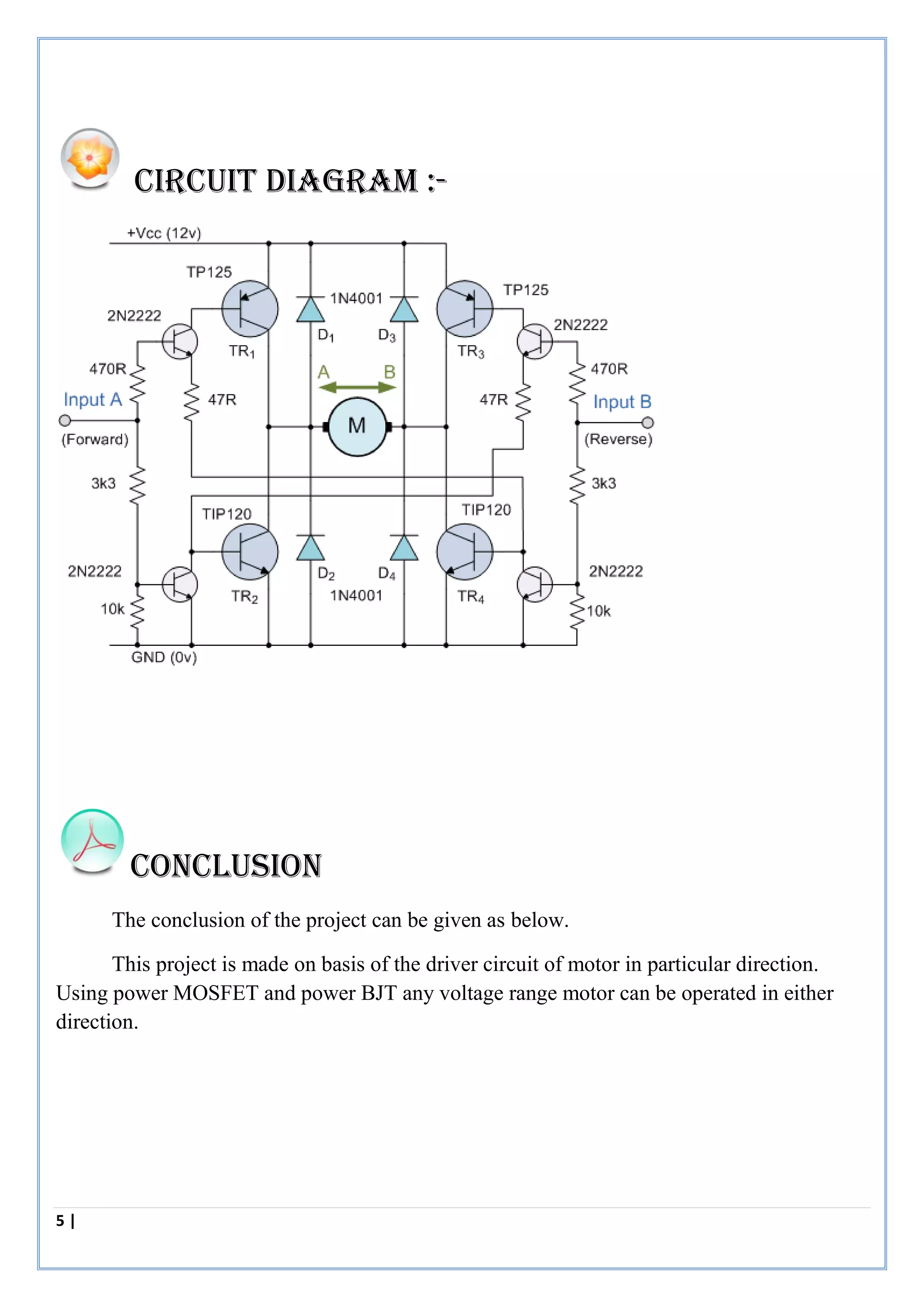

The document is a project report on a bi-directional H-bridge circuit authored by Aalay Kapadia and Ishan Shah, submitted to Nirma University in April 2012. It covers the theory and operation of the H-bridge circuit, detailing how it controls the direction and speed of a DC motor using complementary transistors and pulse width modulation. The report concludes that the H-bridge design can effectively control motors across various voltage ranges.

























































































