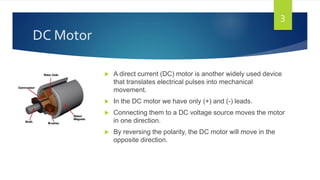
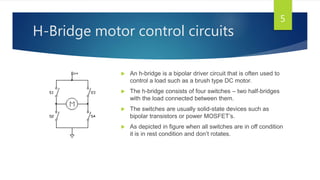
The document discusses controlling the direction of a DC motor using an 8051 microcontroller with C programming. It explains the necessity of an H-bridge for proper operation and outlines the wiring and logic configuration for bidirectional control of the motor. Additionally, it provides a sample C program to demonstrate how to implement the direction control based on a switch input.















































![Share 'speed control_of_dc_motor_using_microcontroller.pptx'[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/sharespeedcontrolofdcmotorusingmicrocontroller-181012151950-thumbnail.jpg?width=640&height=640&fit=bounds)