
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (15)
Similar to Introduction to simulink (1)
Similar to Introduction to simulink (1) (20)
Recently uploaded
Recently uploaded (20)
Introduction to simulink (1)
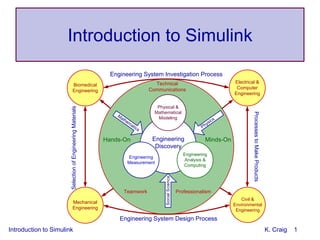
- 1. Introduction to Simulink K. Craig 1 Introduction to Simulink Physical & Mathematical Modeling Engineering Measurement Engineering Analysis & Computing Engineering Discovery Physics Mathematics SocialScience Hands-On Minds-On Technical Communications Teamwork Professionalism Engineering System Investigation Process Engineering System Design Process Mechanical Engineering Electrical & Computer Engineering Civil & Environmental Engineering Biomedical Engineering SelectionofEngineeringMaterials ProcessestoMakeProducts
- 2. Introduction to Simulink K. Craig 2 What is a System? • A system is an assemblage of components or elements intended to act together to accomplish an objective. • The view of a system as a set of interconnected elements is what has been called the “systems approach” to problem solving. • The behavior of a system is specified by its input-output relation, which is a description – usually mathematical – of how the output is affected by the input. • There are two types of systems: static and dynamic. • Engineering dynamic systems can be small-scale and large-scale.
- 3. Introduction to Simulink K. Craig 3 What is a Block Diagram? • Block Diagram – A block diagram of a system is a pictorial representation of the functions performed by each component and of the flow of signals. It describes a set of relationships that hold simultaneously. – A block diagram contains information concerning dynamic behavior, but it does not include any information on the physical construction of the system. – Many dissimilar and unrelated systems can be represented by the same block diagram. – A block diagram of a given system is not unique.
- 4. Introduction to Simulink K. Craig 4 Electro-Pneumatic Transducer: An Engineering System Note the three methods of engineering communication: picture, schematic, & block diagram!
- 5. Introduction to Simulink K. Craig 5 Temperature Feedback Control System: A Larger-Scale Engineering System
- 6. Introduction to Simulink K. Craig 6 What is Simulink? • Simulink is an extension to MatLab that allows engineers to rapidly and accurately build computer models of dynamic physical systems using block diagram notation. – linear and nonlinear systems – continuous-time and discrete-time components – graphical animations are possible • Previously, a block diagram of the dynamic system mathematical model was created and then the block diagram was translated into a programming language. • In Simulink, the computer program is the block diagram and this eliminates the risk that the computer program may not accurately implement the block diagram.
- 7. Introduction to Simulink K. Craig 7 Engineering System Investigation Process Physical System System Measurement Measurement Analysis Physical Model Mathematical Model Parameter Identification Mathematical Analysis Comparison: Predicted vs. Measured Design Changes Is The Comparison Adequate ? NO YES START HERE Focus of Our Attention Here Simulink uses the Mathematical Model represented in Block Diagram form and predicts the dynamic response (solves the equations) of the physical model (not the actual physical system).
- 8. Introduction to Simulink K. Craig 8 F ma Ma Bv Kx F(t) Ma Bv Kx F(t) 1 a ( Bv Kx F(t)) M • Rigid support • Pure and ideal spring • Pure and ideal viscous damper • One degree-of-freedom motion; x direction • Rigid attached mass • System is vertical; g acts down in +x direction Physical System Simplifying Assumptions Mathematical Model
- 9. Introduction to Simulink K. Craig 9 Simulink Block Diagram 1/s means integration in Simulink Gain Block multiplies the input by the gain value To Workspace Block sends selected output to workspace for plotting, analysis, etc.
- 10. Introduction to Simulink K. Craig 10 • Numerical Integration – Rectangle Approximation • Assumes the function has a constant value within each interval • Break the interval into a number of pieces of equal width, T • Evaluate the function at x, the start of each piece, i.e., f(x) • Calculate the area of a rectangle for each piece – Area = T • f(x) • Add up the areas of all the rectangles T f(x)
- 11. Introduction to Simulink K. Craig 11 – Trapezoid Approximation • Assumes the function may change linearly within each interval • Break the interval into a number of pieces of equal width, T • Evaluate the function at x1, the start of each piece, i.e., f(x1) • Evaluate the function at x2, the end of each piece, i.e., f(x2) • Calculate the area of a box with a linearly sloping top for each piece – Area = T • ½ [f(x1) + f(x2)] • Add up the areas of all the boxes f(x1) f(x2) T
- 12. Introduction to Simulink K. Craig 12 • Inputs to a Dynamic System – Engineers typically use two inputs to evaluate dynamic systems: a step input and a sinusoidal input. – By a step input of any variable, we will always mean a situation where the system is at rest at time t = 0 and we instantly change the input quantity, from wherever it was just before t = 0, by a given amount, either positive or negative, and then keep the input constant at this new value forever. This leads to a transient response called the step response of the system. – When the input to the system is a sine wave, the steady- state response of the system, after all the transients have died away, is called the frequency response of the system. – These two input types lead to the two views of dynamic system response: time response and frequency response.
- 13. Introduction to Simulink K. Craig 13 Step Response blue mass is placed on mass M at t = 0 and left there
- 14. Introduction to Simulink K. Craig 14 Why is Simulink Important? • The potential productivity improvement and cost savings realized from the block diagram approach to programming is dramatic. • There are two principal strategies for Simulink employment. – Rapid Prototyping • This is the application of productivity tools to develop working prototypes in the minimum amount of time. Here we optimize for development speed, rather than execution speed or memory use. A hierarchy of physical models is used in this phase. Physical system design and control design are optimized simultaneously.
- 15. Introduction to Simulink K. Craig 15 – Rapid Application Development • Here the final computer program is the Simulink model or is derived from the Simulink model through automatic C-code generation.
- 16. Introduction to Simulink K. Craig 16 MatLab Desktop Command WindowCurrent Directory / Workspace Command History Simulink Icon
- 17. Introduction to Simulink K. Craig 17
- 18. Introduction to Simulink K. Craig 18 File → New → Model
- 19. Introduction to Simulink K. Craig 19 Simulink Block Diagram Manipulations
- 20. Introduction to Simulink K. Craig 20 • Some Simulink Block Diagram Suggestions – Careful arrangements of blocks and signal lines can make relationships easier to follow. – Naming blocks and signal lines and adding annotations to the model can make the purpose of the model elements easier to understand. – The Best Way to ensure that your Simulink Block Diagram accurately represents your mathematical model equations is to write your mathematical model equations directly from the Simulink Block Diagram and then compare your result to the actual equations. This will uncover any errors before you start to use your block diagram to investigate model behavior.
- 21. Introduction to Simulink K. Craig 21 F ma Ma Bv Kx F(t) dv dx a v dt dt Ma Bv Kx F(t) 1 a ( Bv Kx F(t)) M Spring-Mass System Mathematical Model a v v x a v v x
- 22. Introduction to Simulink K. Craig 22 Initial Conditions a v v x
- 23. Introduction to Simulink K. Craig 23 1 a ( Bv Kx F(t)) M
- 24. Introduction to Simulink K. Craig 24 1 a ( Bv Kx F(t)) M
- 25. Introduction to Simulink K. Craig 25 1 a ( Bv Kx F(t)) M
- 26. Introduction to Simulink K. Craig 26 1 a ( Bv Kx F(t)) M
- 27. Introduction to Simulink K. Craig 27 1 a ( Bv Kx F(t)) M
- 28. Introduction to Simulink K. Craig 28 1 a ( Bv Kx F(t)) M
- 29. Introduction to Simulink K. Craig 29 1 a ( Bv Kx F(t)) M
- 30. Introduction to Simulink K. Craig 30 1 a ( Bv Kx F(t)) M
- 31. Introduction to Simulink K. Craig 31 Simulation → Configuration Parameters → Solver
- 32. Introduction to Simulink K. Craig 32 Simulation → Configuration Parameters → Data Import/Export
- 33. Introduction to Simulink K. Craig 33 M-File for Parameters Start Simulation
- 34. Introduction to Simulink K. Craig 34
- 35. Introduction to Simulink K. Craig 35
- 36. Introduction to Simulink K. Craig 36