Downloaded 255 times

![Example
For the sake of example, lets take m = 2, b = 5, and k = 3.
>> m = 2;
>> b = 5;
>> k = 3;
>> A = [ 0 1 ; -k/m -b/m ];
>> B = [ 0 ; 1/m ];
>> C = [ 1 0 ];
>> D = 0;
>> statespace_ss = ss(A, B, C, D)](https://image.slidesharecdn.com/statespacemodels-150430012529-conversion-gate02/85/State-space-models-11-320.jpg)
![EXTRACTING A, B, C, D
MATRICES FROM A STATE
SPACE MODEL
In order to extract the A, B, C, and D
matrices from a previously defined state
space model, use MATLAB's ssdata
command.
[A, B, C, D] = ssdata(statespace)
where statespace is the name of the state
space system.](https://image.slidesharecdn.com/statespacemodels-150430012529-conversion-gate02/85/State-space-models-15-320.jpg)
![Example
>> [A, B, C, D] = ssdata(statespace_ss)
The MATLAB output will be:
A =
-2.5000 -0.3750
4.0000 0](https://image.slidesharecdn.com/statespacemodels-150430012529-conversion-gate02/85/State-space-models-16-320.jpg)


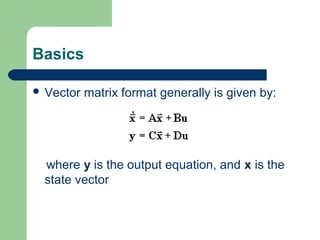
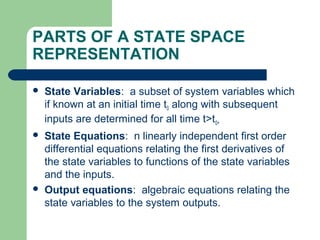
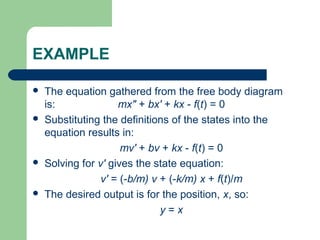
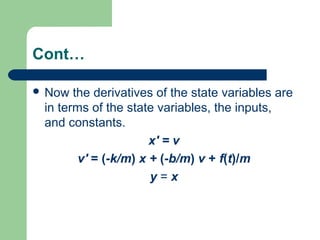
This document provides an overview of state space models. It defines the key parts of a state space representation including state variables, state equations, output equations, and gives an example of converting a second order differential equation to state space form. It also describes how to input a state space model into MATLAB using the A, B, C, and D matrices and how to calculate step responses.