Downloaded 98 times







![Mr. Yuvraj Singh 9
Creation of Zero-Pole-Gain Models
sys = zpk(Z,P,K) creates a continuous-time zero-pole-gain model with zeros Z,
poles P, and gain(s) K. The output sys is a zpk model object storing the model data.
In the SISO case, Z and P are the vectors of real- or complex-valued zeros and poles, and K is
the real- or complex-valued scalar gain:
h(s)=k(s−z(1))(s−z(2))…(s−z(m))(s−p(1))(s−p(2))…(s−p(n))
Set Z or p to [] for systems without zeros or poles. These two vectors need not have equal
length and the model need not be proper (that is, have an excess of poles).
To create a MIMO zero-pole-gain model, specify the zeros, poles, and gain of each SISO
entry of this model. In this case:
Z and P are cell arrays of vectors with as many rows as outputs and as many columns as
inputs, and K is a matrix with as many rows as outputs and as many columns as inputs.
The vectors Z{i,j} and P{i,j} specify the zeros and poles of the transfer function from
input j to output i.
K(i,j) specifies the (scalar) gain of the transfer function from input j to output i.
PROGRAM
Z=[-1,-2];
P=[1,2,-3];
K=[37];
t=zpk(Z,P,K)
OUTPUT
Zero/pole/gain:
37 (s+1) (s+2)
-----------------
(s-1) (s-2) (s+3)
RESULT:- We have successfully execute the program in ZPK form.](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-9-320.jpg)


![Mr. Yuvraj Singh 12
PROGRAM
N=[k,3*k,2*k];
D=[1,0,-7,6];
K=37;
T=tf(N,D)
OUTPUT
K = 37
N = 37 111 74
D = 1 0 -7 6
Transfer function
37 s^2 + 111 s + 74
------------------
s^3 - 7 s + 6
RESULT:- We have successfully excute the transfer function when coefficient of S are given.](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-12-320.jpg)

![Mr. Yuvraj Singh 14
Here we discuss the first order control system without zeros. First order control
system tell us the speed of the response that what duration it reaches to the steady state.
If the input is unit step, R(s) = 1/s so the output is step response C(s). The general equation of 1st
order control system is
C(s) = R(s)G(s)
i.e
C(s) = a/s(s + a)and G(s) is transfer function.
There are two poles, one is input pole at the origin s = 0 and other is system pole at s = -a, this
pole is at negative axis of pole plot. We can find the pole and zeros in MATLAB SOFTWARE
by using command pzmap means pol zero map.
We now taking the inverse transform so total response is becomes y(t) = cf(t) + cn(t) which is
sum of forced response and natural response. Due to the input pole at the origin.
A. Impluse Response Of 1st
Order System
PROGRAM
A=37;
N=[1];
D=[A,1];
T=tf(N,D)
impulse(T)
grid on
OUTPUT
Transfer Function
1
-------
3 7s + 1](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-14-320.jpg)
![Mr. Yuvraj Singh 15
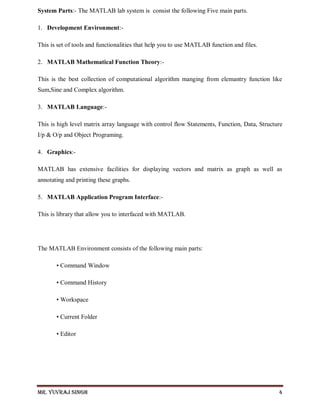
Graph-
Fig:- Impluse Response Of 1st
Order System
B. Step Response Of 1st
Order System
PROGRAM
T=[37]
N=[1]
D=[T,1]
T=tf(N,D)
step(T)
grid on
OUTPUT
T = 37
N = 1
D = 37 1
0 5 10 15 20 25
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
imp responce of 1st order RC series N/W (37)
Time (sec)
Amplitude](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-15-320.jpg)
![Mr. Yuvraj Singh 16
Transfer function 1
-----------
37 s + 1
GRAPH
Fig:- Step Response Of 1st
Order System
C. Ramp Responce Of 1st
Order System
Program
Y=37;
N=[1];
D=[Y,1];
T=tf(N,D)
A=0:0.5:50;
u=A;
lsim(T,U,A)
grid on
Step Response
Time (sec)
Amplitude
0 50 100 150 200 250
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: T
Time (sec): 37
Amplitude: 0.632
System: T
Time (sec): 74
Amplitude: 0.865
System: T
Time (sec): 148
Amplitude: 0.982](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-16-320.jpg)


![Mr. Yuvraj Singh 19
1. Un-Damped:- A system is said to be Undamped system when the value of zeta is zero.
No damping occurs in this case.This is also known as Sustained Oscillations. For Un-
Damped conditions the value of ζ=0 .
PROGRAM
ωn=37;
ζ=0;
N=[ωn*ωn]
D=[1,2*ζ*ωn,ωn*ωn]
A=0:0.1:5;
T=tf(N,D)
step(T,A)
title('step response of 2nd order system for undamped condition')
OUTPUT
N = 1369
D = 1 0 1369
Transfer function: 1369
-------------------
(s^2 + 1369)](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-19-320.jpg)
![Mr. Yuvraj Singh 20
GRAPH
Fig:- Un-Damped Condition
2. Under Damped:- A system is said to be under damped system when the value of ζ is
less than one. In this case roots are complex in nature and the real parts are always
negative. System is asymptotically stable. Rise time is lesser than the other system with
the presence of finite overshoot. For Under Damped conditions the range is 0 < ζ < 1 .
PROGRAM
ωn=37;
ζ=0.3;
N=[ωn*ωn]
D=[1,2*ζ*ωn,ωn*ωn]
T=tf(N,D)
step(T)
title('step response of 2nd order system for under damped condition')
grid on
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
step response of 2nd order system for undamped condition
Time (sec)
Amplitude](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-20-320.jpg)

![Mr. Yuvraj Singh 22
3. Critically Damped:- A system is said to be critically damped system when the value of ζ
is one. In this case roots are real in nature and the real parts are always repetitive in
nature. System is asymptotically stable. Rise time is less in this system and there is no
presence of finite overshoot. For Critical Damped conditions the value of ζ =1 .
PROGRAM
ωn=37;
ζ=1;
N=[ ωn*ωn]
D=[1,2* ζ*ωn,ωn*ωn]
T=tf(N,D)
step(T)
title('step response of 2nd order system for critical damped condition')
grid on
OUTPUT
N =1369
D =1 74 1369
Transfer Function: 1369
-----------------------
s^2 + 74 s + 1369](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-22-320.jpg)
![Mr. Yuvraj Singh 23
GRAPH
Fig:- Critical Damped Condition
4. Over damped system :- A system is said to be over damped system when the value of ζ is
greater than one. In this case roots are real and distinct in nature and the real parts are always
negative. System is asymptotically stable. Rise time is greater than the other system and there is
no presence of finite overshoot. For Over Damped conditions the range is ζ > 1 .
PROGRAM
ωn=37;
ζ=10;
N=[ ωn*ωn]
D=[1,2* ζ*ωn,ωn*ωn]
T=tf(N,D)
step(T)
title('step response of 2nd order system for overdamped condition')
grid on
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
step response of 2nd order system for critical damped condition
Time (sec)
Amplitude](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-23-320.jpg)


![Mr. Yuvraj Singh 26
3. Rise Time (Tr)
The time required to rise from 10% to 90% of its final value by a under damped time
response signal during its first cycle of oscillation.
4. Maximum overshoot (Mp)
The difference between the magnitude of the highest peak of time response and magnitude of
its steady state. Maximum overshoot is expressed in term of percentage of steady-state value
of the response.
5. Settling time (Ts)
The time required by the response to reach and steady within specified range of 2 % to 5 % of its
final value. In other words The settling time of a response is that time after which the response
reaches to its steady-state condition with value above nearly 98 % of its final value.
PROGRAM
ωn=37;
ζ =0.3;
N=[ωn*ωn]
D=[1,2*ζ*ωnωn*ωn]
T=tf(N,D)
step(T)
title('step response of 2nd order syste m for under damped condition')
OUTPUT
N=1369
D =1.0e+003 *
0.0010 0.0148 1.3690](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-26-320.jpg)


![Mr. Yuvraj Singh 29
If we have an input function of X(s), and an output function Y(s), we define the
transfer function
H(s) to be: H(s)= Y(s)/X(s).
Having applied the step input and rearranged the equation in the frequency domain, we are now
ready to transform back to the time domain. Checking the Laplace transform tables, a frequency
domain function of the type b/s(s+b) has a time domain equivalent of (1-e-bt
). In the equation
above, b = 1/RC, therefore:
This equation describes the change in voltage across the capacitor when a step input voltage of a
Volts is applied to the circuit.
1. Step Response Of 1st
Order RC N/W
PROGRAM
R=37
C=.1
T=R*C
N=[1]
D=[T,1]
A=tf(N,D)
step(A)
grid on
Title ('step responce of 1st order RC series N/W (37)' )](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-29-320.jpg)

![Mr. Yuvraj Singh 31
2. Impluse Response Of 1st
Order RC N/W
PROGRAM
R=37
C=.1
T=R*C
N=[1]
D=[T,1]
A=tf(N,D)
impulse(A)
grid on
Title ('imp responce of 1st order RC series N/W (37)' )
OUTPUT
R = 37
C = 0.1000
T = 3.7000
N = 1
D = 3.7000 1.0000
Transfer function: 1
-----------
3.7 s + 1](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-31-320.jpg)
![Mr. Yuvraj Singh 32
GRAPH
Fig:- Impluse Response Of 1st
Order RC N/W
3. Ramp Response Of 1st
Order RC N/W
PROGRAM
R=37
C=.1
T=R*C
N=[1]
D=[T,1]
Y=tf(N,D)
A=0:0.001:50;
U=A;
lsim(Y,U,A)
grid on
Title ('ramp responce of 1st order RC series N/W (37)')
0 5 10 15 20 25
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
imp responce of 1st order RC series N/W (37)
Time (sec)
Amplitude](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-32-320.jpg)


![Mr. Yuvraj Singh 35
1. Ramp Response For RLC N/W
PROGRAM
R=37
L=.1
C=.1
W=sqrt(1/(L*C))
d=(R*sqrt(C/L))/2
N=[W*W]
D=[1,2*d*W,W*W]
T=tf(N,D)
A=0:0.001:50;
U=A;
lsim(T,U,A)
Title ('ramp responce for RLC N/W')
OUTPUT
R = 37
L = 0.1000
C = 0.1000
W = 10
d = 18.5000
N = 100
D = 1 370 100
Transfer function: 100
--------------------
s^2 + 370 s + 100](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-35-320.jpg)
![Mr. Yuvraj Singh 36
GRAPH
Fig:- Ramp Response For RLC N/W
2. Step Response For RLC N/W
PROGRAM
R=37
L=.1
C=.1
W=sqrt(1/(L*C))
d=(R*sqrt(C/L))/2
N=[W*W]
D=[1,2*d*W,W*W]
T=tf(N,D)
step (T)
Title ('step responce for RLC series N/W')
ramp responce for RLC N/W
Time (sec)
Amplitude
0 5 10 15 20 25 30 35 40 45 50
0
5
10
15
20
25
30
35
40
45
50
System: T
Time (sec): 37
Amplitude: 33.3](https://image.slidesharecdn.com/cslab-180404200334/85/Control-system-Lab-record-36-320.jpg)


The document is a lab report submitted by Mr. Yuvraj Singh for his Control System Lab course. It includes an index listing 8 experiments performed, along with the objectives, requirements, theory, programs, outputs, and results for Experiment 1 on introducing MATLAB software and Experiment 2 on obtaining a transfer function from zero-pole-gain parameters in MATLAB. The experiments involve modeling and analyzing first and second order control systems using MATLAB.