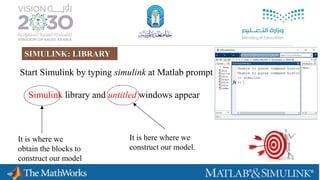
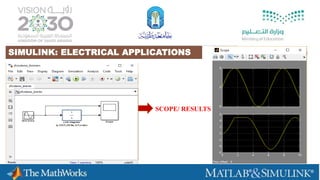
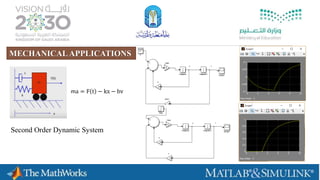
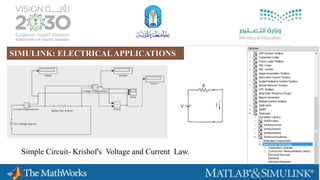
This document provides information about a MATLAB workshop for engineers. The workshop will cover basics of MATLAB/GUI/Simulink including how to solve simple problems and explore their capabilities. It will introduce MATLAB/GUI and Simulink through examples and topics like built-in functions, vectors/matrices, plotting, animation and functions. Specific modeling examples for mechanical and electrical applications using Simulink will also be presented. Participants will learn how to construct their own models in Simulink and display results.

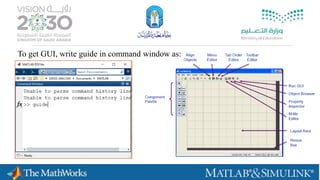
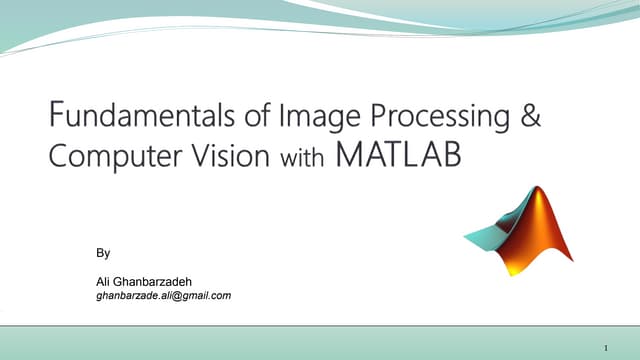
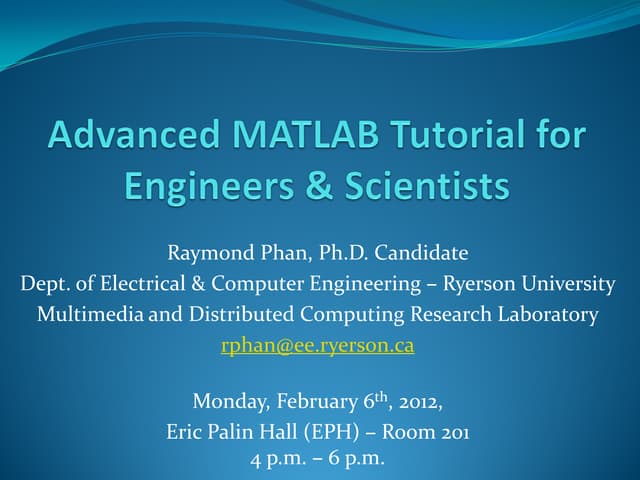
![frame = getframe(1);
im = frame2im(frame);
[imind,cm] = rgb2ind(im,256);
if k == 1;
imwrite(imind,cm,filename,'gif',
'Loopcount',inf);
else
imwrite(imind,cm,filename,'gif','WriteMode'
,'append');
end
filename = 'upwind.gif'; Open file and
name it!!!
Creating A
frame
Upwind Method (Scheme)
GIF ANIMATED PLOTS](https://image.slidesharecdn.com/e5e8688d-3402-4359-87c2-82da2070a760-170117201417/85/ADVANCED-WORKSHOP-IN-MATLAB-6-320.jpg)
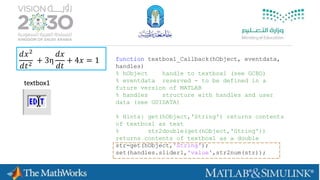
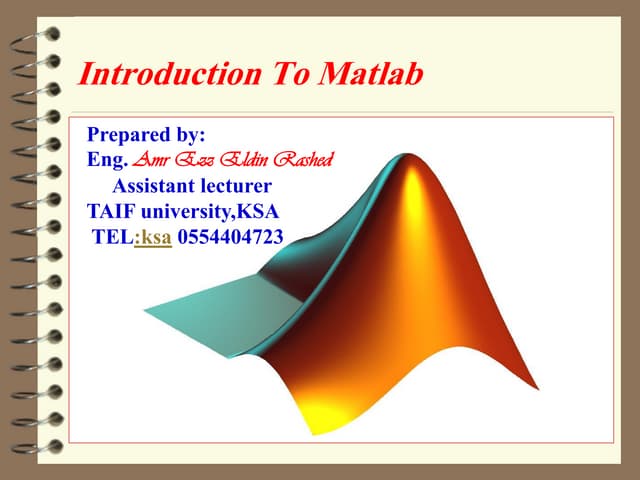
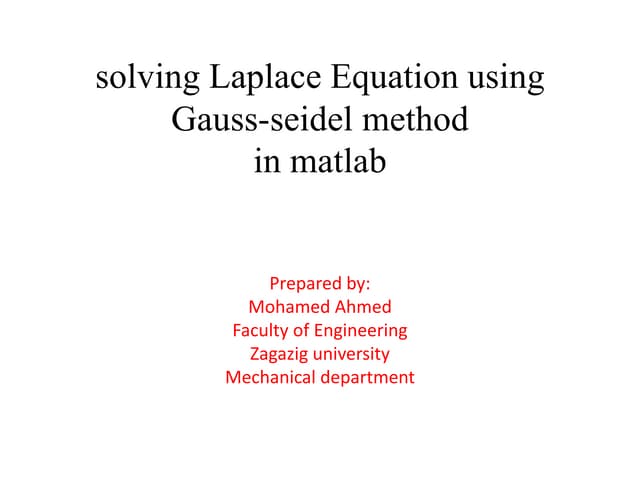
![% Clear workspace
clear
clc
clf
% Define variables
N=100; % number of nodes
L=1; % The length of the domain
dx=L/(N);
x=0:dx:L;
ti=0; % Initial time
tf=0.8; % Final time
v=0.5; % Velcoity
dt=dx/v;
% Set Initial condition
uo=exp(-200*(x-0.25).^2);
u=uo;
unp1=uo;
% Loop through the time
nsteps=tf/dt;
t=ti;
filename = 'upwind.gif';
for k=1:nsteps
% BCs
u(1)=u(1);
u(N)=u(N);
% Exact Solution
% Calculate the FOU scheme
for i=2:N-1
unp1(i)=u(i)-v*dt/dx*(u(i)-u(i-1));
end
ua=exp(-200*(x-0.25-v*t).^2);
% Update u and t
t=t+dt;
u=unp1;
% Plot solution
plot(x,u,'bo-',x,ua,'r--')
xlabel('x')
ylabel('u')
shg
axis([ 0 L -0.5 1.5]);
grid on
pause (dt)
title(['Velcoity u (Time in [sec] is
' num2str(t) ')']);
drawnow
frame = getframe(1);
im = frame2im(frame);
[imind,cm] = rgb2ind(im,256);
if k == 1;
imwrite(imind,cm,filename,'gif',
'Loopcount',inf);
else
imwrite(imind,cm,filename,'gif','WriteM
ode','append');
end
end](https://image.slidesharecdn.com/e5e8688d-3402-4359-87c2-82da2070a760-170117201417/85/ADVANCED-WORKSHOP-IN-MATLAB-7-320.jpg)

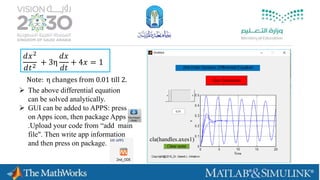
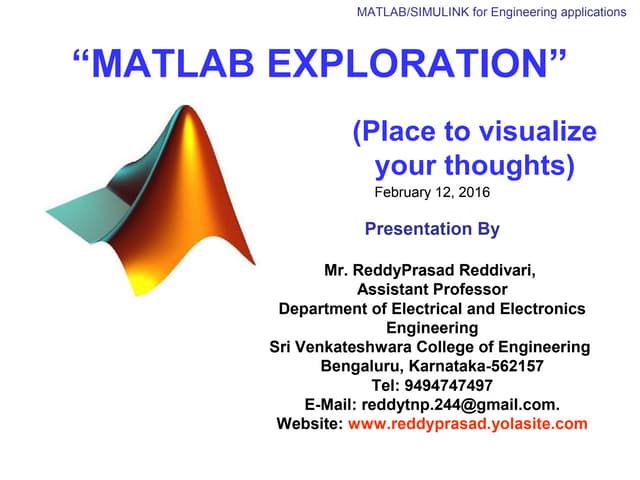
![𝑑𝑥2
𝑑𝑡2
+ 3η
𝑑𝑥
𝑑𝑡
+ 4𝑥 = 1
function runsimulation_Callback(hObject, eventdata, handles)
% hObject handle to runsimulation (see GCBO)
% eventdata reserved - to be defined in a future version of
MATLAB
% handles structure with handles and user data (see
GUIDATA)
eta=get(handles.slider1,'value');
G=tf(1,[1,3*eta,4])
time=linspace(0,20,200);
[x]=step(G,time);
axes(handles.axes1);
plot(time,x)
hold on
grid on
xlabel('Time')
ylabel('x')](https://image.slidesharecdn.com/e5e8688d-3402-4359-87c2-82da2070a760-170117201417/85/ADVANCED-WORKSHOP-IN-MATLAB-11-320.jpg)

























































![[Steven karris] introduction_to_simulink_with_engi](https://cdn.slidesharecdn.com/ss_thumbnails/stevenkarrisintroductiontosimulinkwithengibooksee-160426081331-thumbnail.jpg?width=640&height=640&fit=bounds)
