The document is a lecture on MATLAB for automatic control systems, introducing its basic operations, matrix manipulations, and important functions for modeling and analyzing systems. It covers various model representations such as transfer function, zero-pole-gain, and state space, as well as stability and time/frequency domain analyses. Additionally, it outlines how to create and manage MATLAB files and includes examples of generating plots.
![4
1 2
m
3 4
Variable assignment
• Scalar: a = 4
• Vector: v = [3 5 1]
v(2) = 8
t = [0:0.1:5]
• Matrix: m = [1 2 ; 3 4]
m(1,2)=0
v 3 5 1
v 3 8 1
t 0 0.1 0.2 4.9 5
1 0
m
3 4](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-4-320.jpg)
![5
Basic Operations
• Scalar expressions
b = 10 / ( sqrt(a) + 3 )
c = cos (b * pi)
• Matrix expressions
n = m * [1 0]’
10
b
a 3
1 0 1 1
n
3 4 0 3
c cos(b )](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-5-320.jpg)
![7
Example
• Generate and plot a cosine function
x = [0:0.01:2*pi];
y = cos(x);
plot(x,y)](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-7-320.jpg)
![14
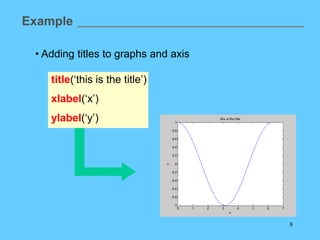
Transfer Function representation
Given:
2
( ) 25
( )
( ) 4 25
Y s
G s
U s s s
num = [0 0 25];
den = [1 4 25];
G = tf(num,den)
Method (a) Method (b)
s = tf('s');
G = 25/(s^2 +4*s +25)
Matlab function: tf](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-14-320.jpg)
![15
Zero-Pole-Gain representation
Given:
( ) 3( 1)
( )
( ) ( 2 )( 2 )
Y s s
H s
U s s i s i
zeros = [1];
poles = [2-i 2+i];
gain = 3;
H = zpk(zeros,poles,gain)
Matlab function: zpk](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-15-320.jpg)
![16
State Space representation
Given: ,
x Ax Bu
y Cx Du
Matlab function: ss
1 0 1
2 1 0
3 2 0
A B
C D
A = [1 0 ; -2 1];
B = [1 0]’;
C = [3 -2];
D = [0];
sys = ss(A,B,C,D)](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-16-320.jpg)

![20
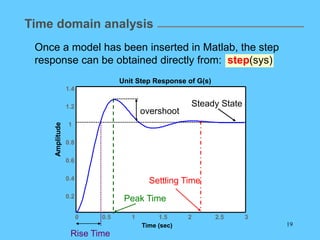
Time domain analysis
• Impulse response
impulse(sys)
• Response to an arbitrary input
e.g.
t = [0:0.01:10];
u = cos(t);
lsim(sys,u,t)
Matlab also caries other useful functions for time domain
analysis:
! It is also possible to assign a variable to those functions to obtain a
vector with the output. For example: y = impulse(sys);](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-20-320.jpg)
![23
Extra: partial fraction expansion
num=[2 3 2];
den=[1 3 2];
[r,p,k] = residue(num,den)
r =
-4
1
p =
-2
-1
k =
2
Answer:
)
1
(
1
)
2
(
4
2
)
(
)
(
)
1
(
)
1
(
)
(
)
(
0
s
s
s
n
p
s
n
r
p
s
r
s
k
s
G
2
3
2
3
2
)
( 2
2
s
s
s
s
s
G
Given:](https://image.slidesharecdn.com/4413-lecture-09-240514043025-ba09cc1d/85/4413-lecture-09-Introduction-Matlab-lecture-ppt-23-320.jpg)