Download as PDF, PPTX



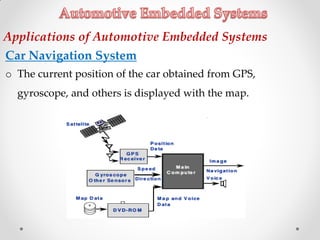

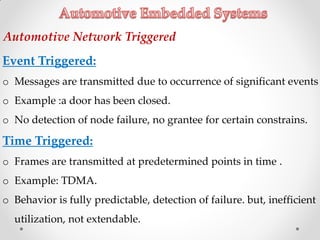
![Automotive Network protocol
Speed[bit/s]
Byteflight
optical bus
LIN
master-slave
single wire bus
no quartz
CAN-B
event triggered
fault tolerant
dual wire
CAN-C
event triggered
dual wire
Flex Ray
25.6M
20K
10M
1M
125K
incremental cost per node [$]
D2B, MOST
token ring
optical bus
1 2 4.5 10](https://image.slidesharecdn.com/intro-150328102135-conversion-gate01/85/Embedded-Systems-in-Automotive-27-320.jpg)


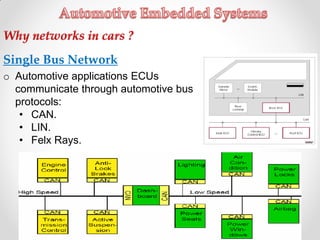
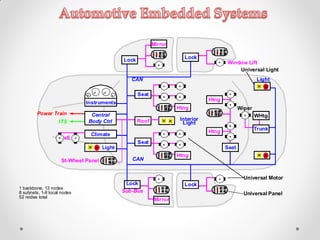
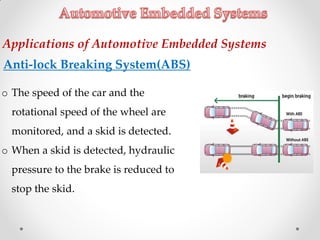
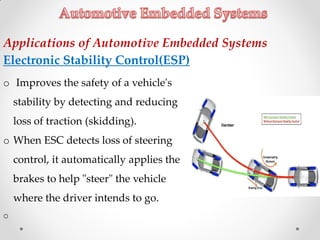
Drive-by-wire technology replaces traditional mechanical systems with electronic systems controlled by electronic control units (ECUs). ECUs consist of microcontrollers, sensors, power switches, drivers, and voltage regulators. They connect sensors and actuators to a central ECU. Modern cars contain up to 100 ECUs communicating over automotive bus protocols like CAN, LIN, and FlexRay. This allows for advanced driver assistance systems like anti-lock braking systems and electronic stability control.