














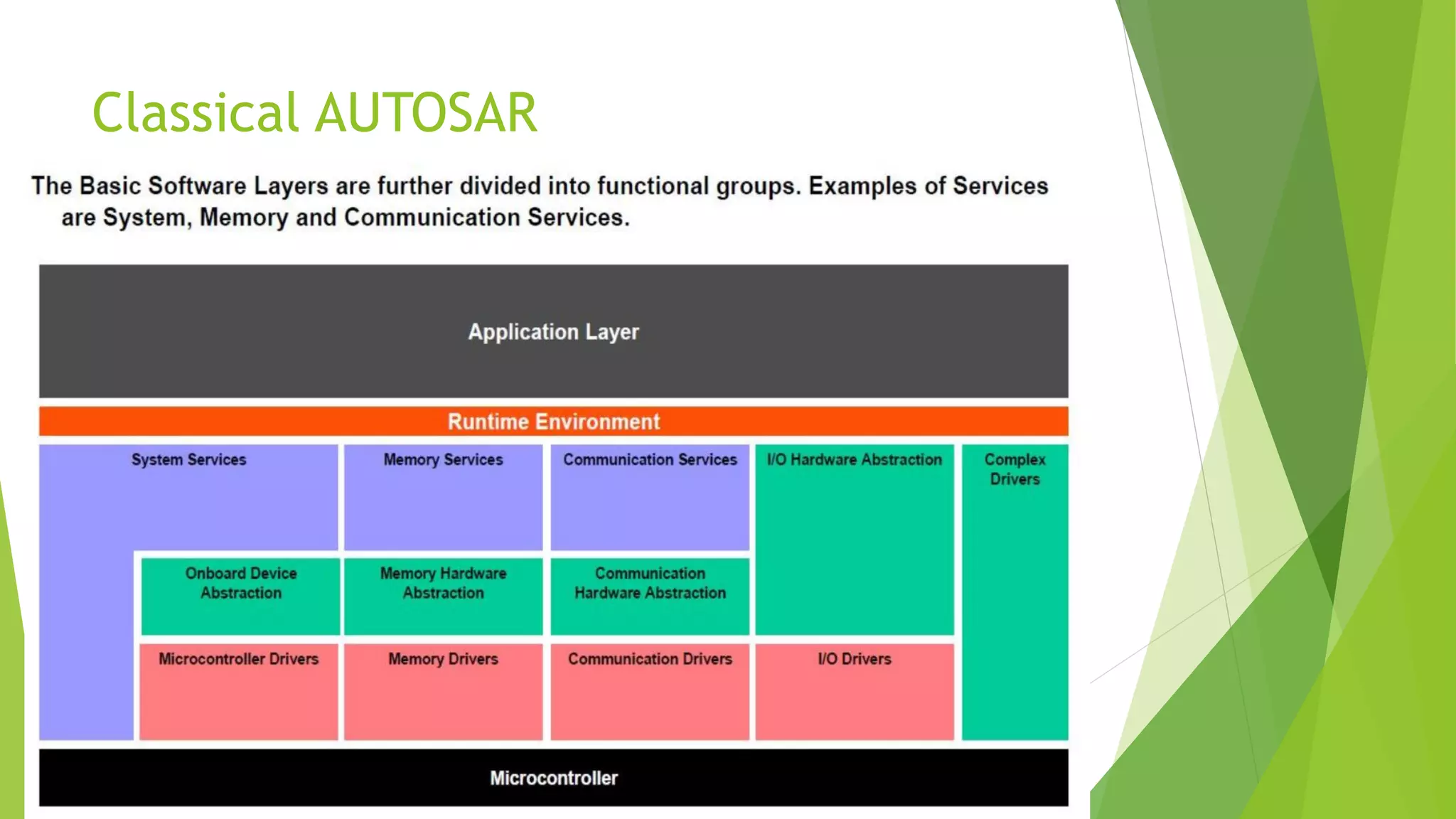
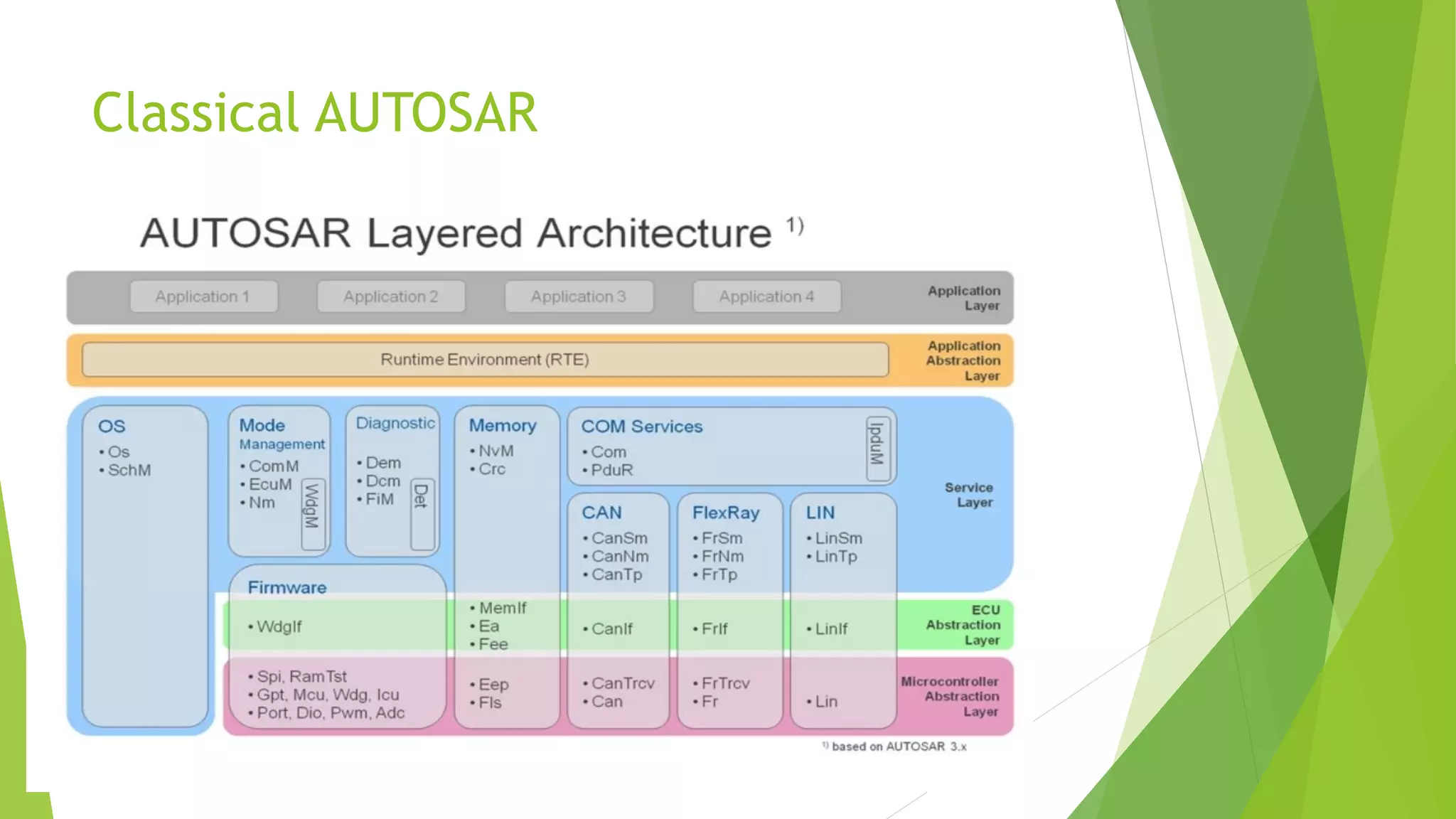
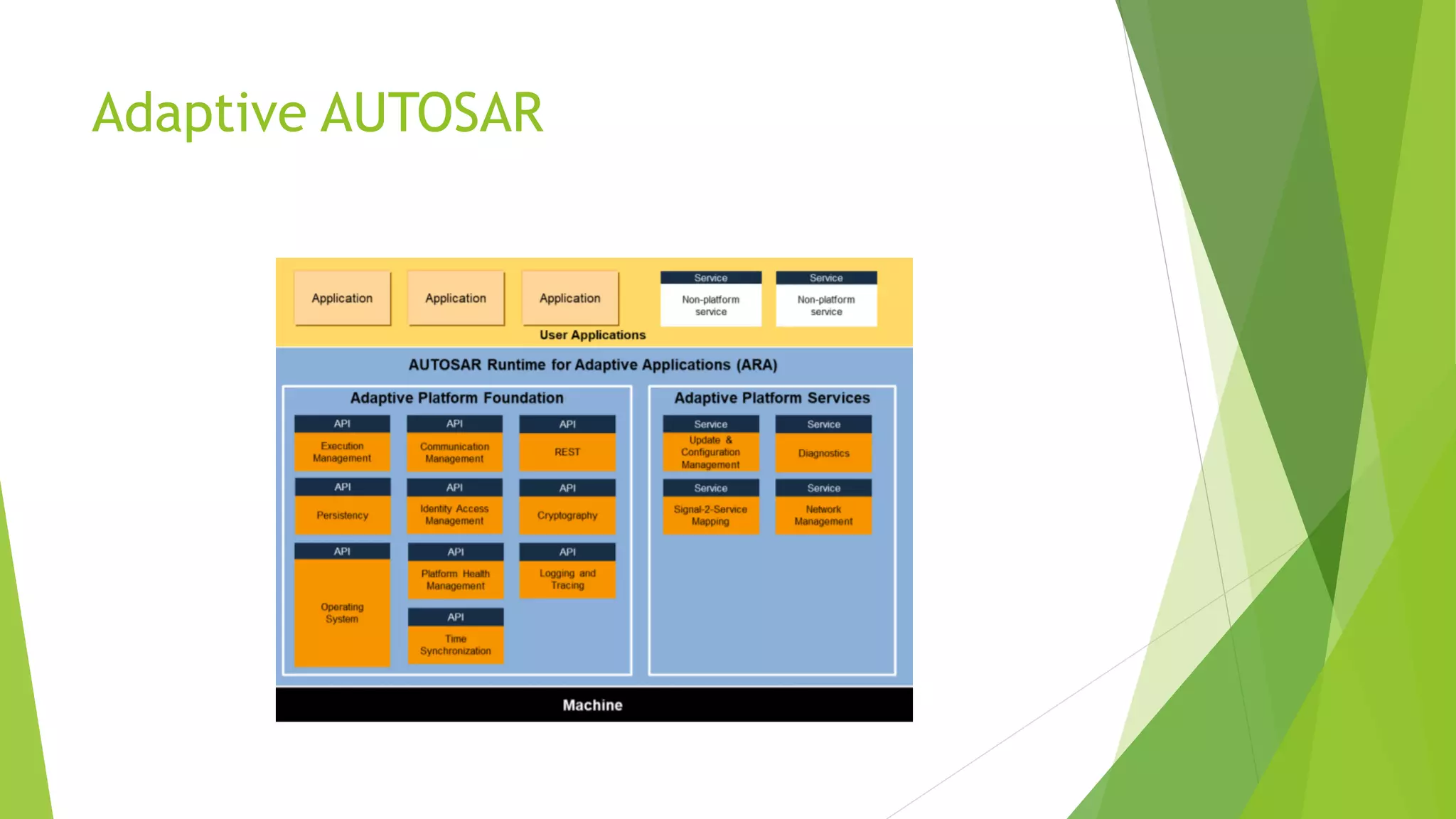
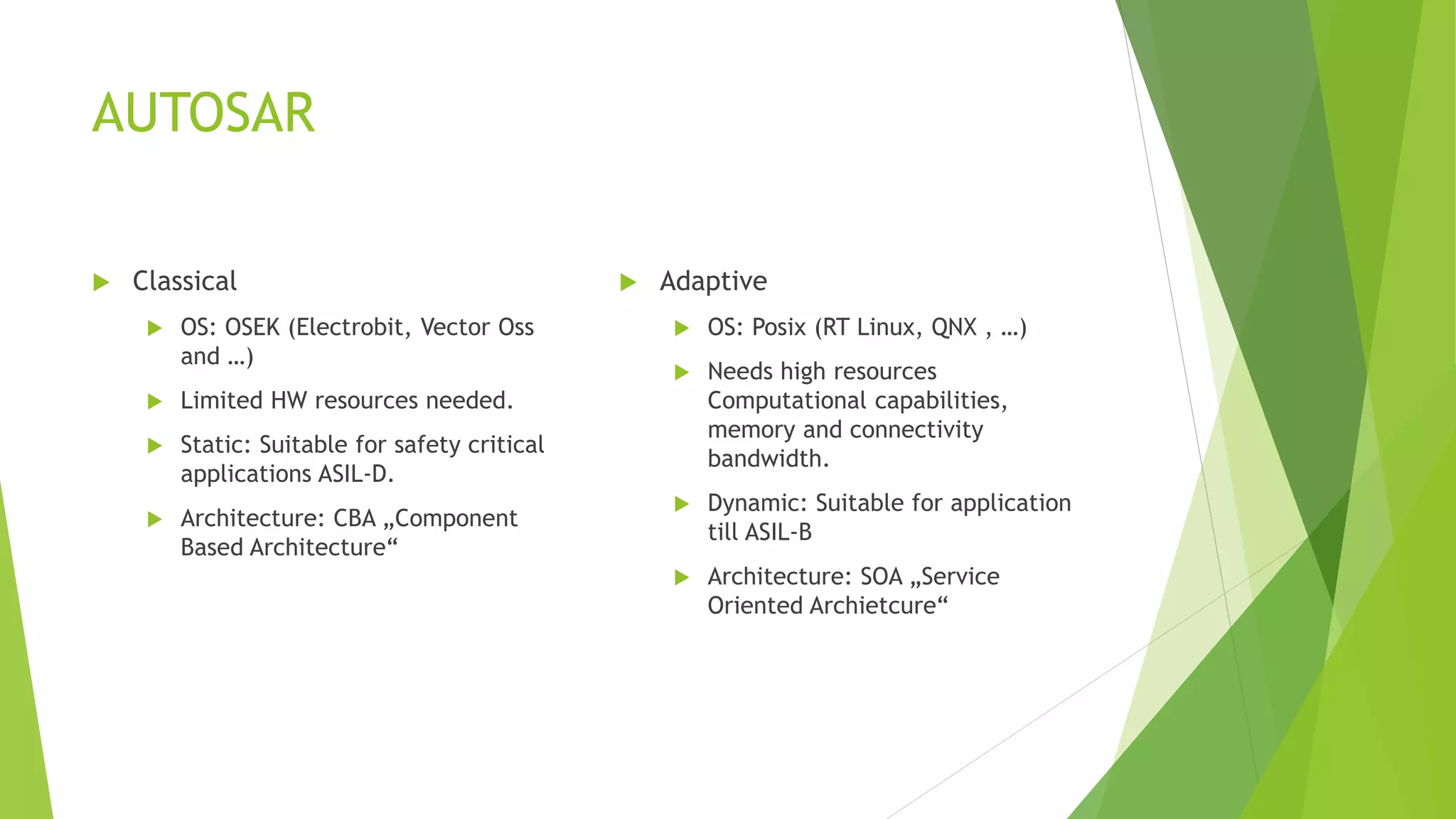
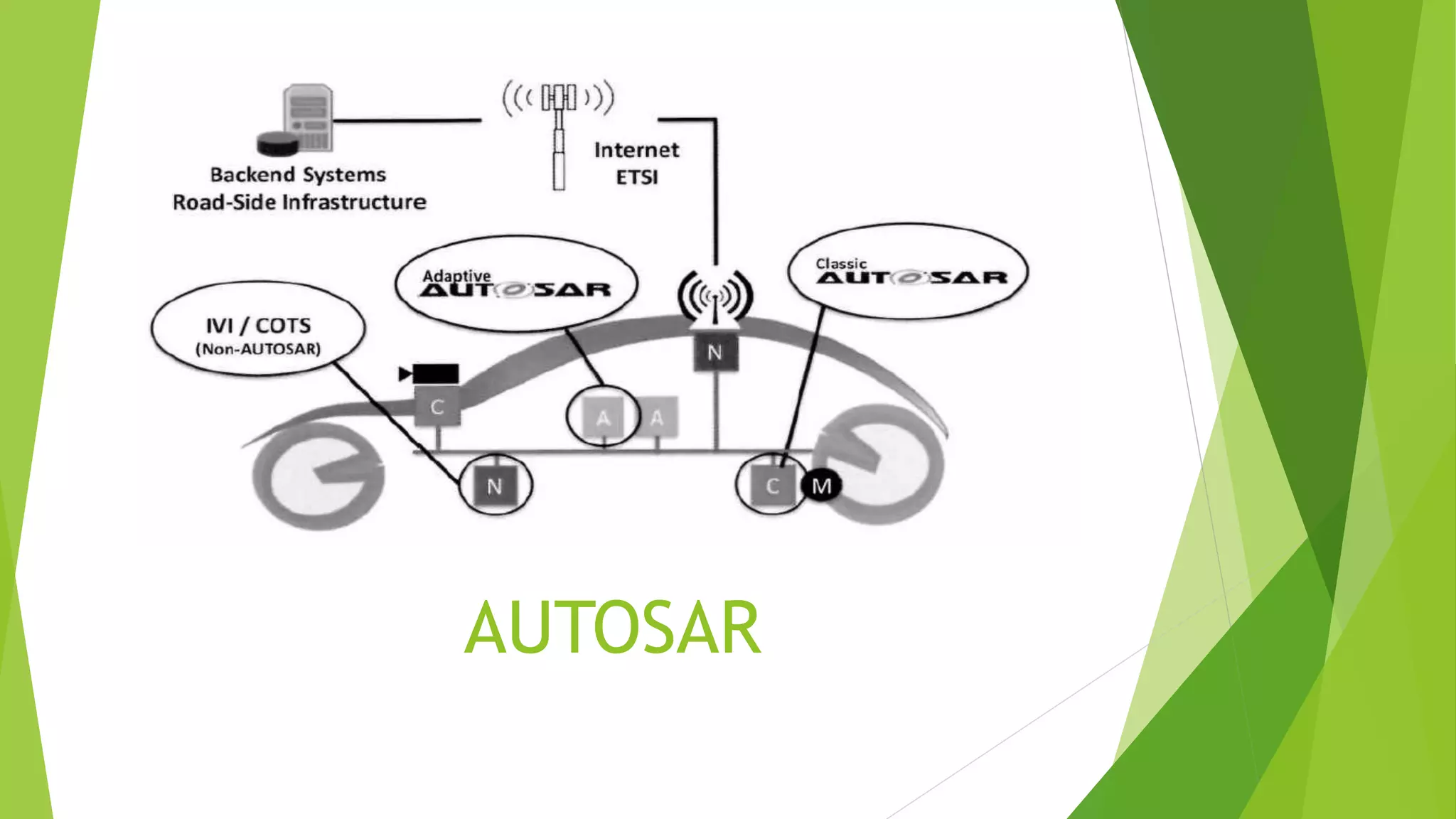






This document provides an overview of automotive software. It discusses key terms like OEM, Tier 1, and ECU. It describes the production chain and gives examples of common ECUs. Emerging areas like autonomous driving, electric vehicles, and connectivity are covered. The document also discusses communication protocols, programming languages, technical positions, AUTOSAR standards, development processes like V-Model and Scrum, and recommends training resources.










































































