Downloaded 403 times
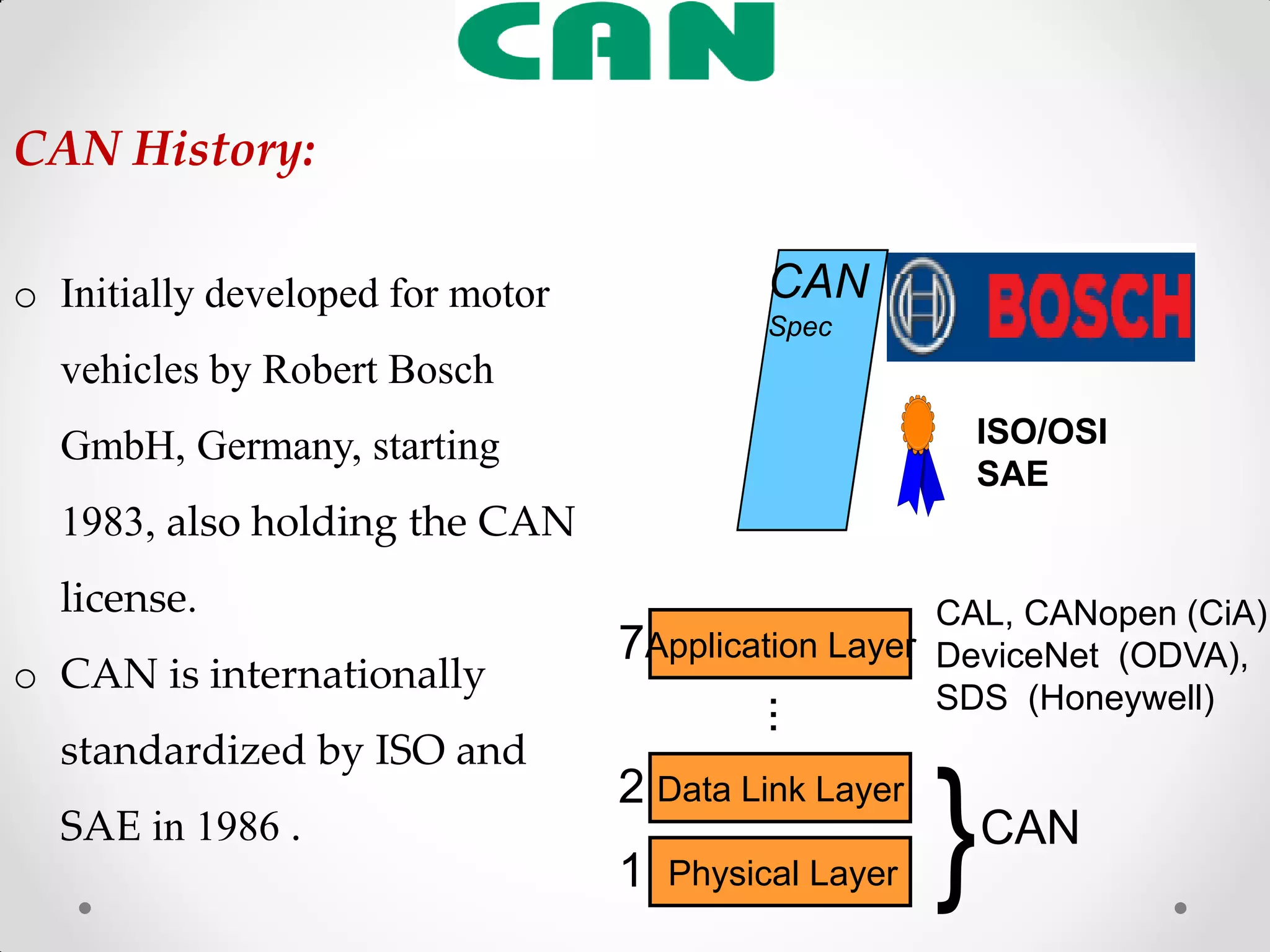
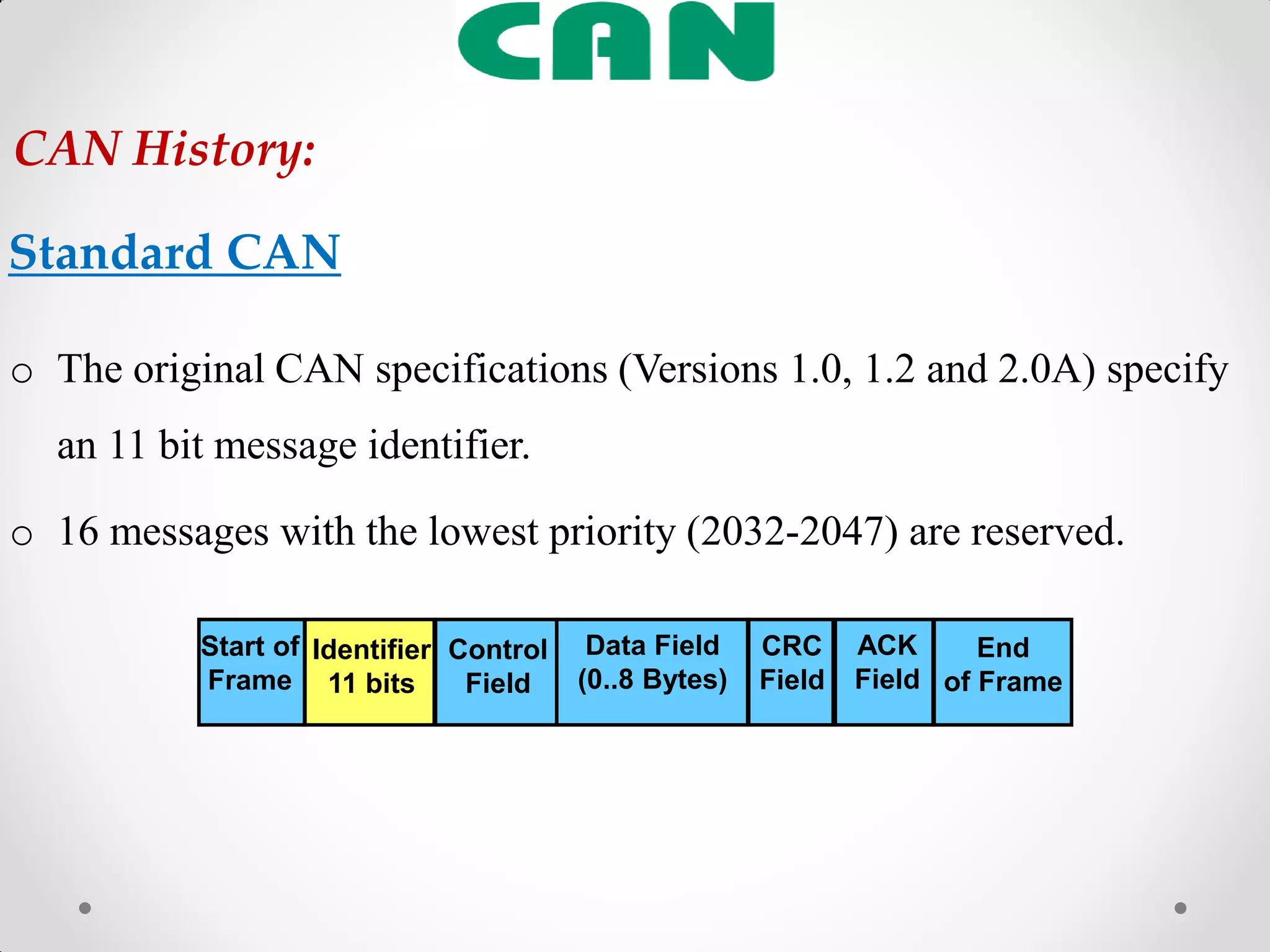
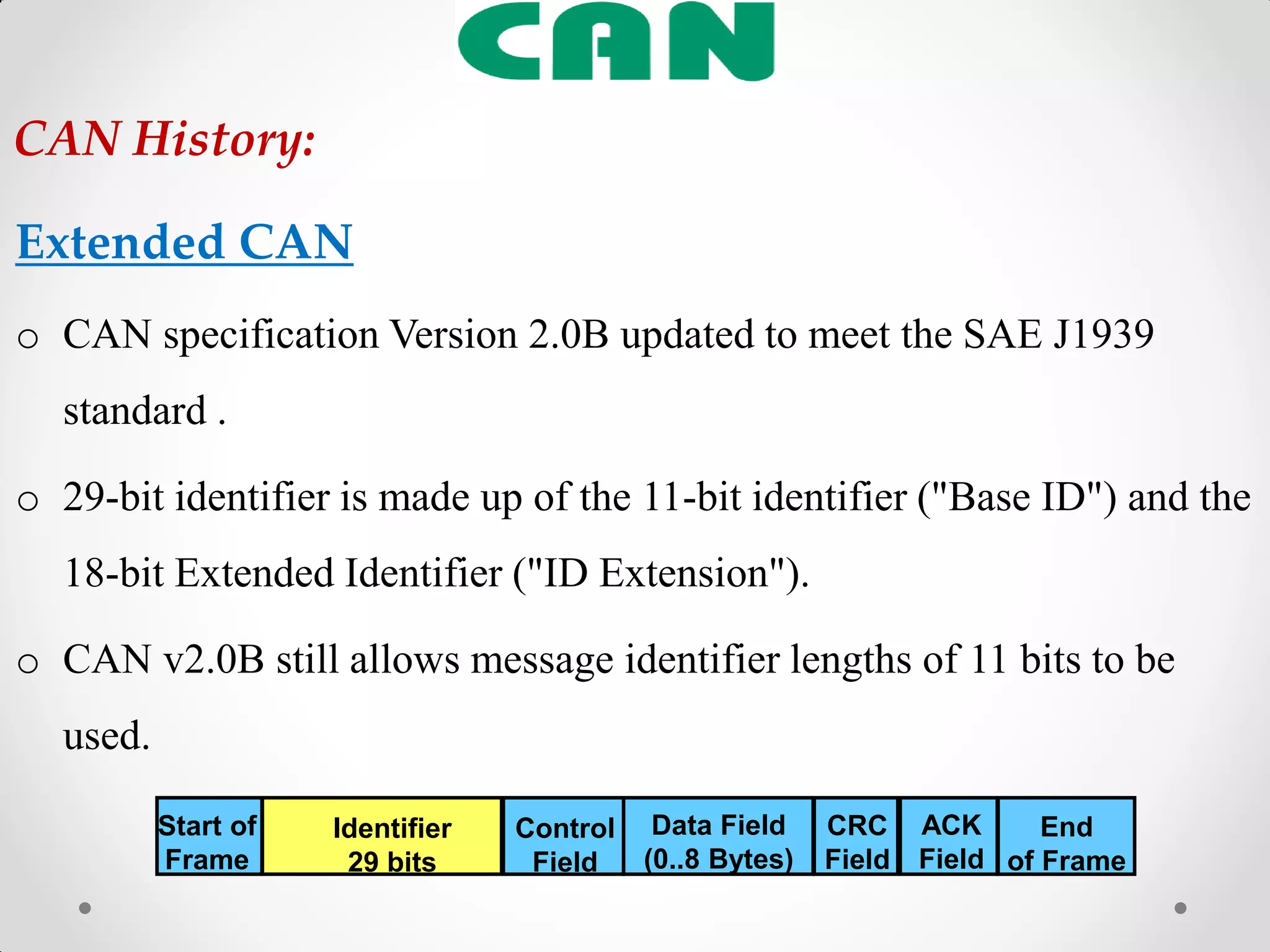
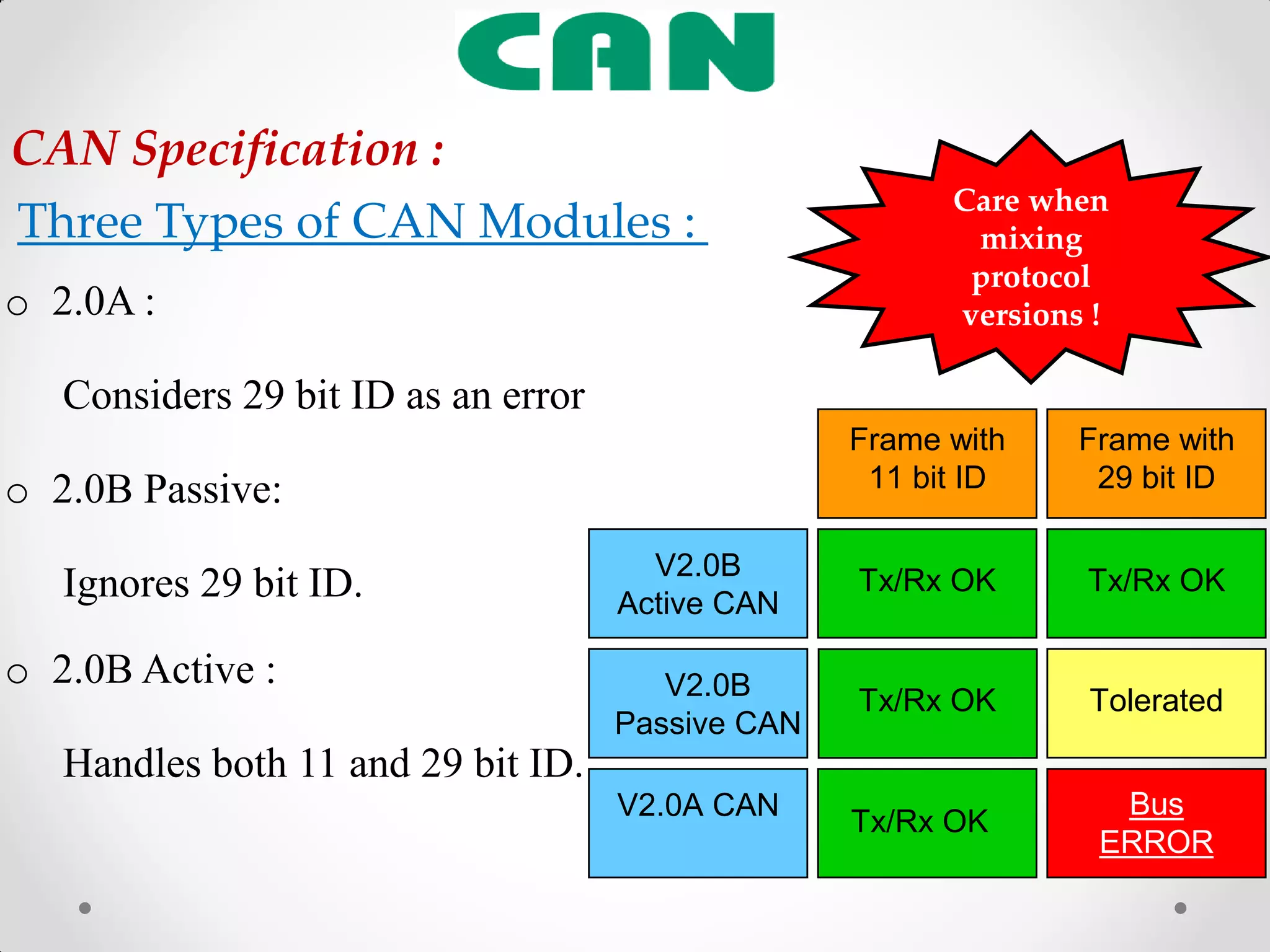
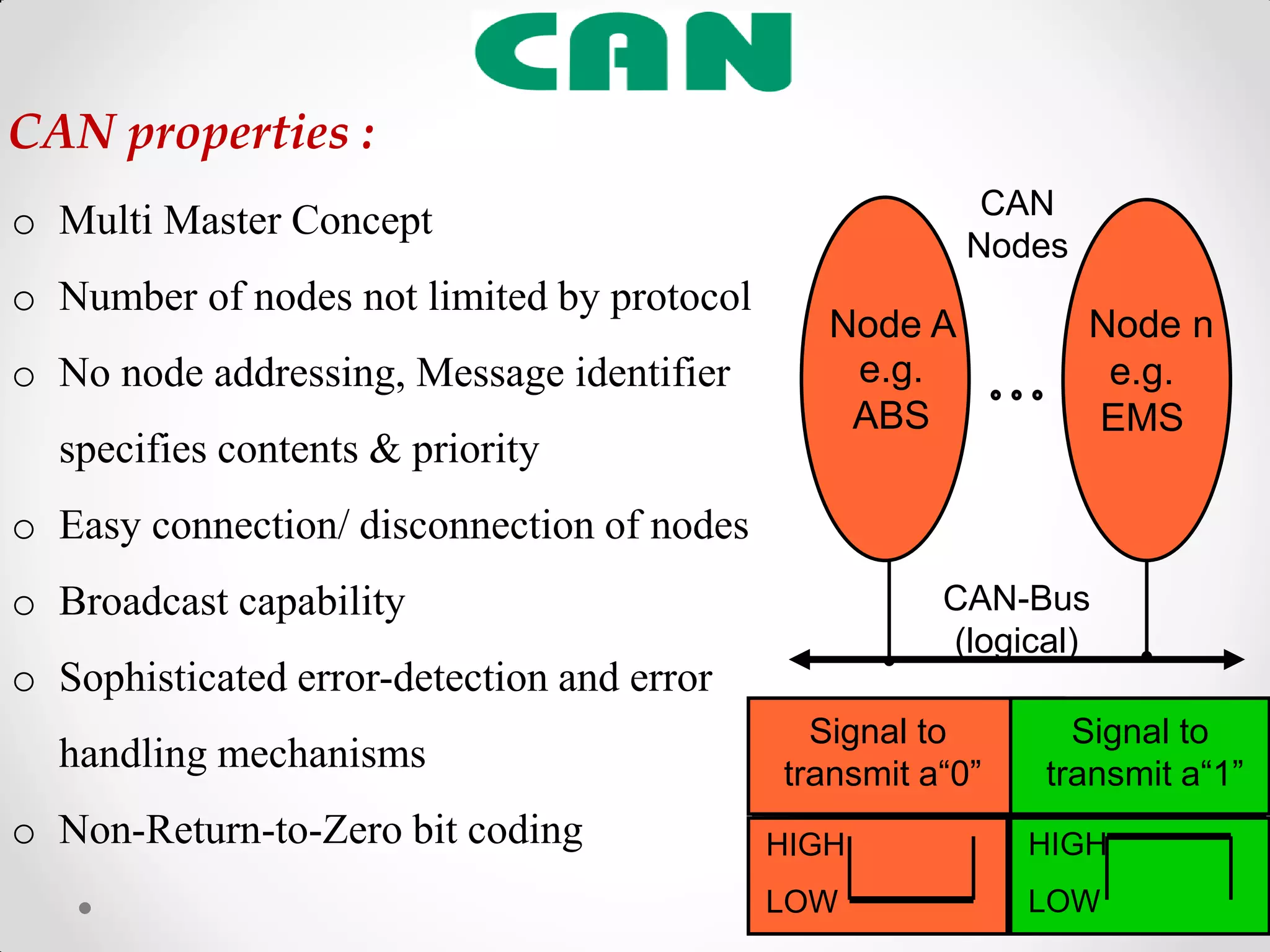
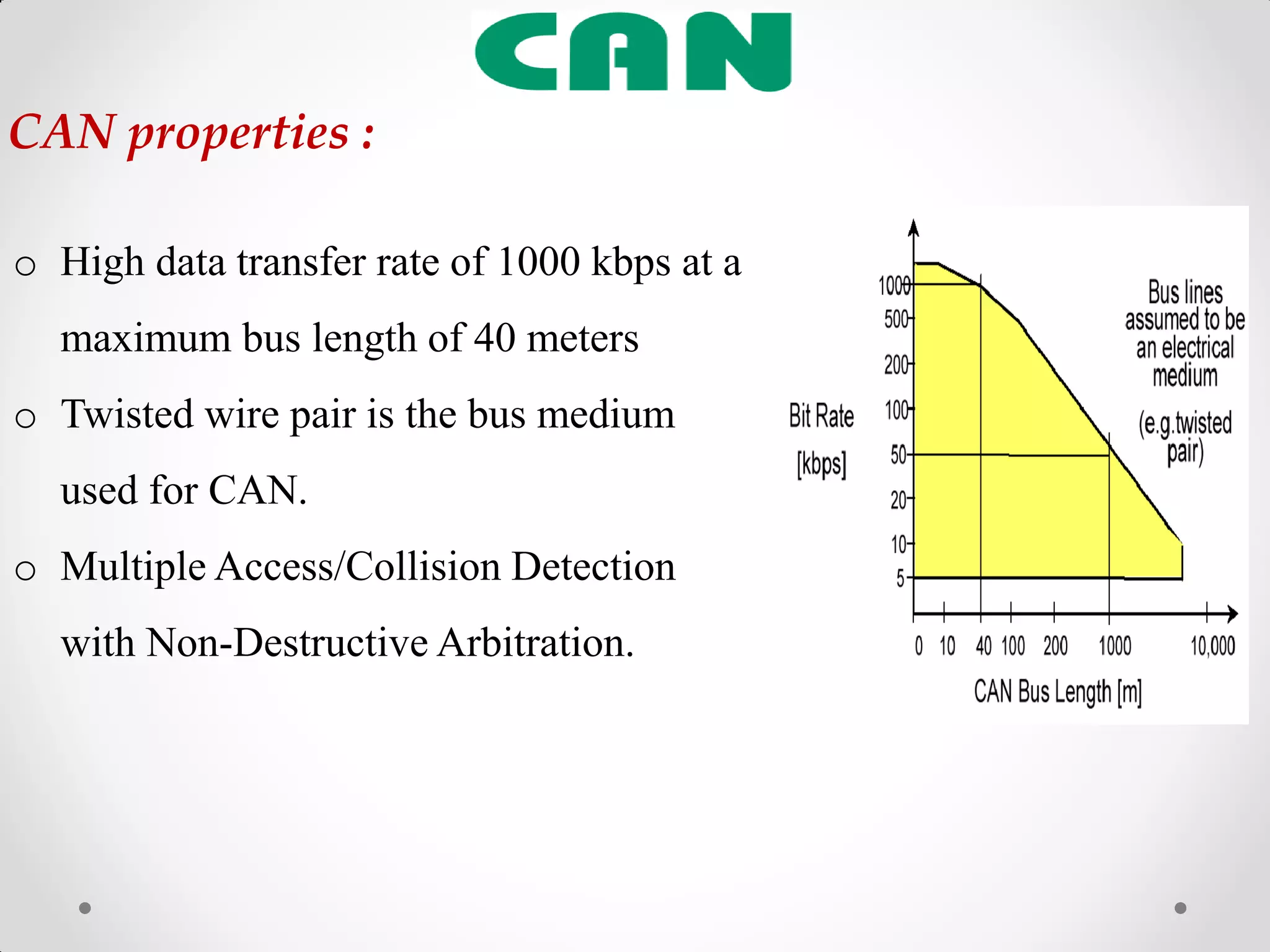
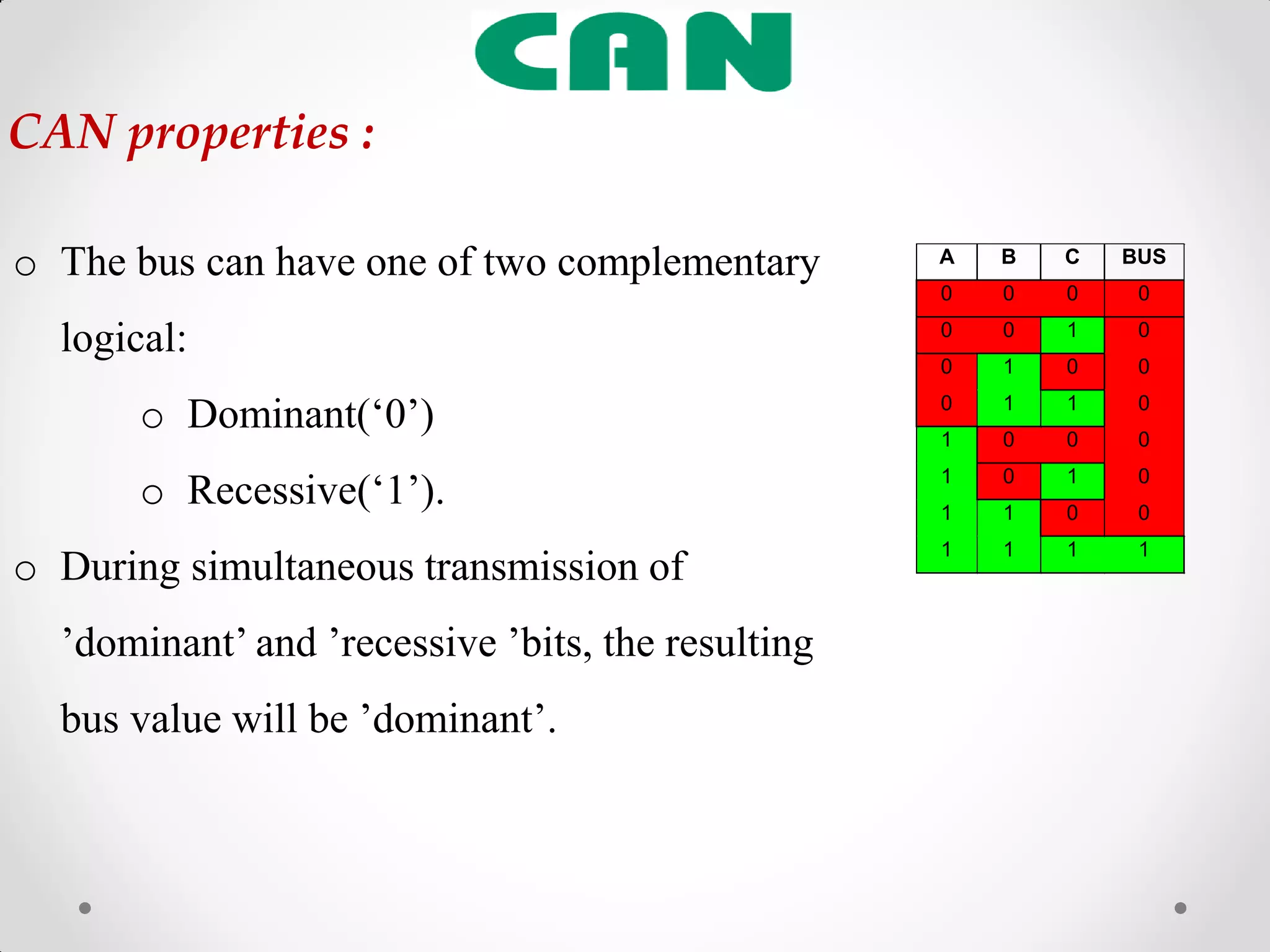
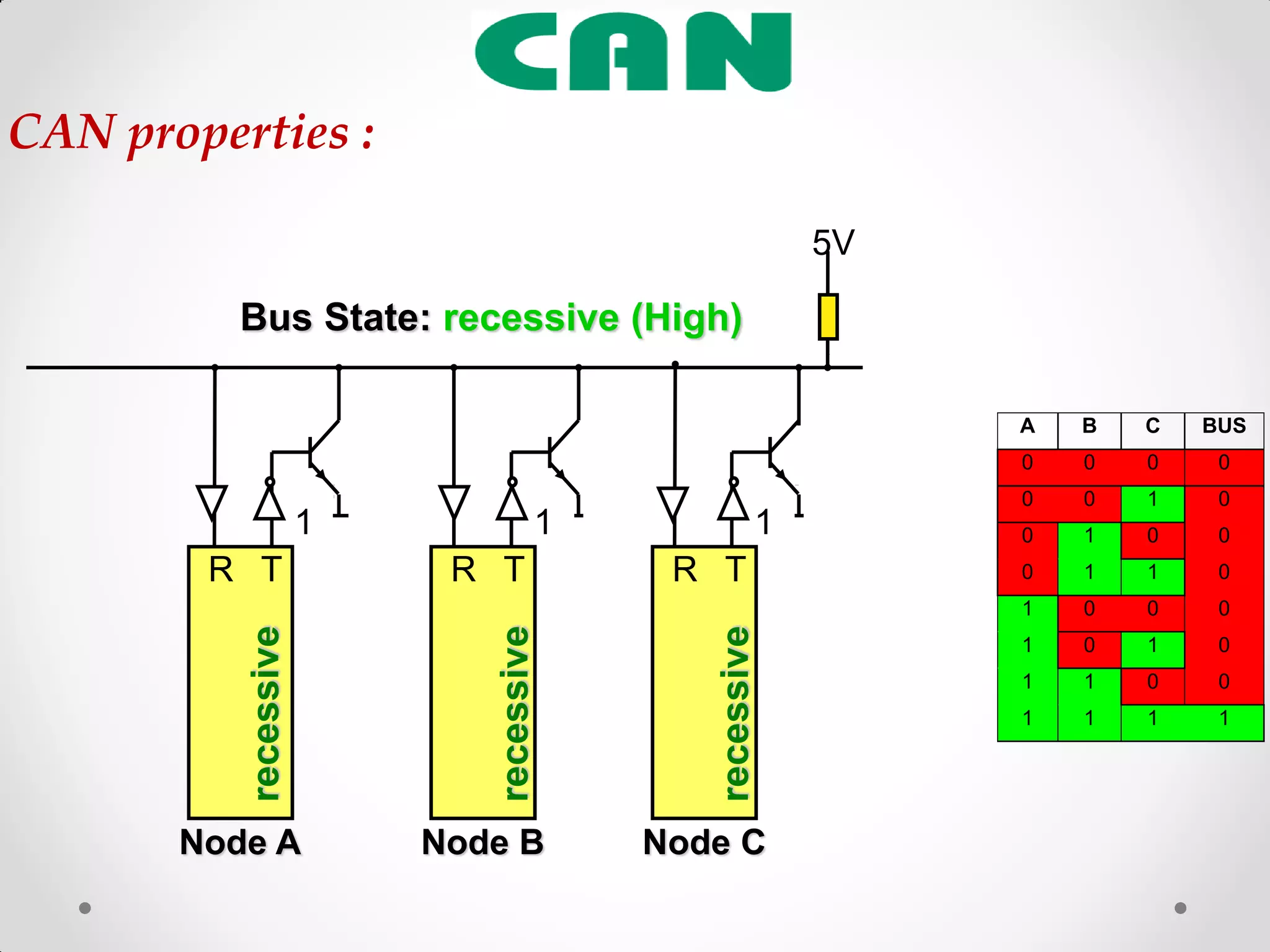
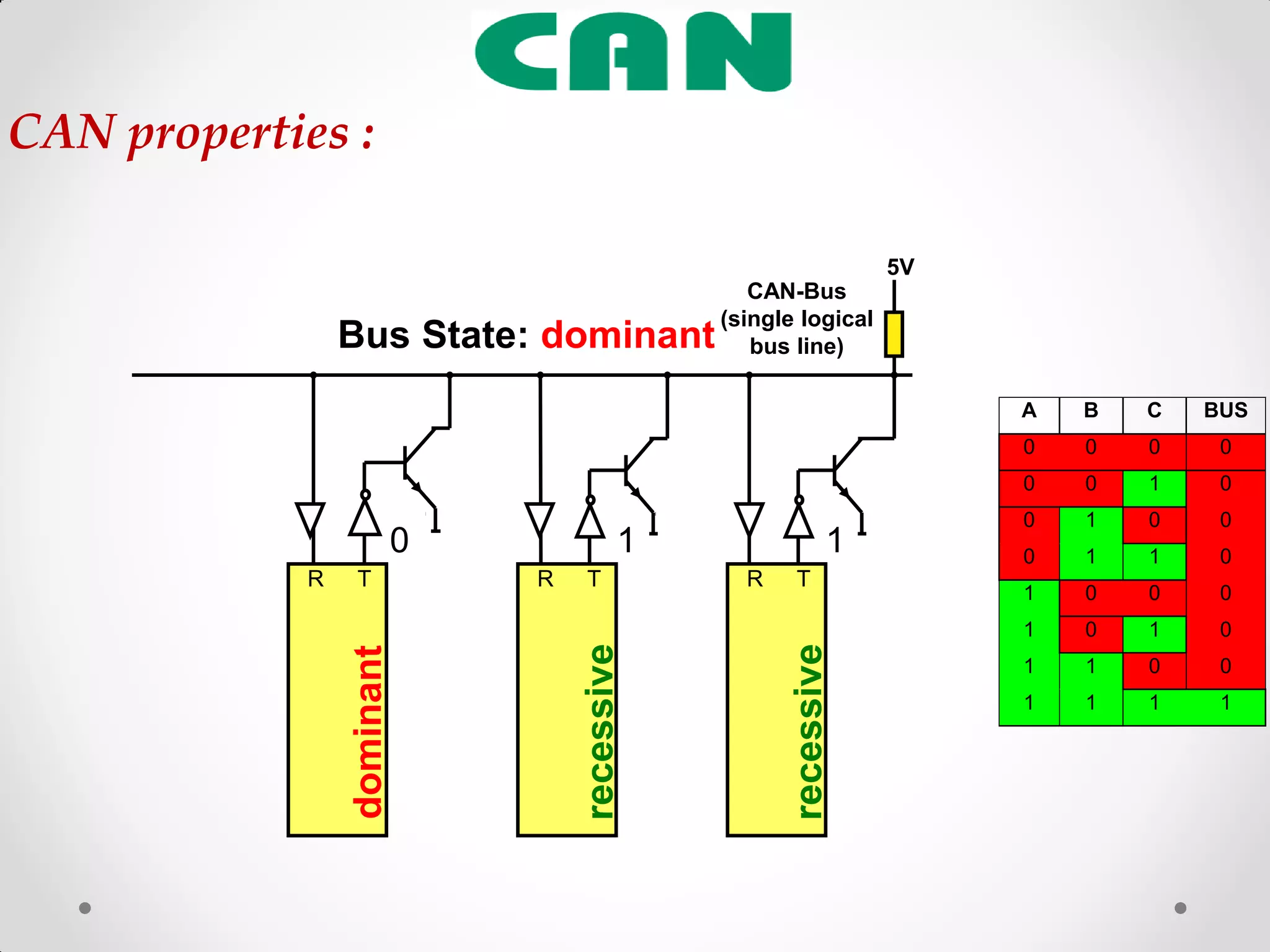




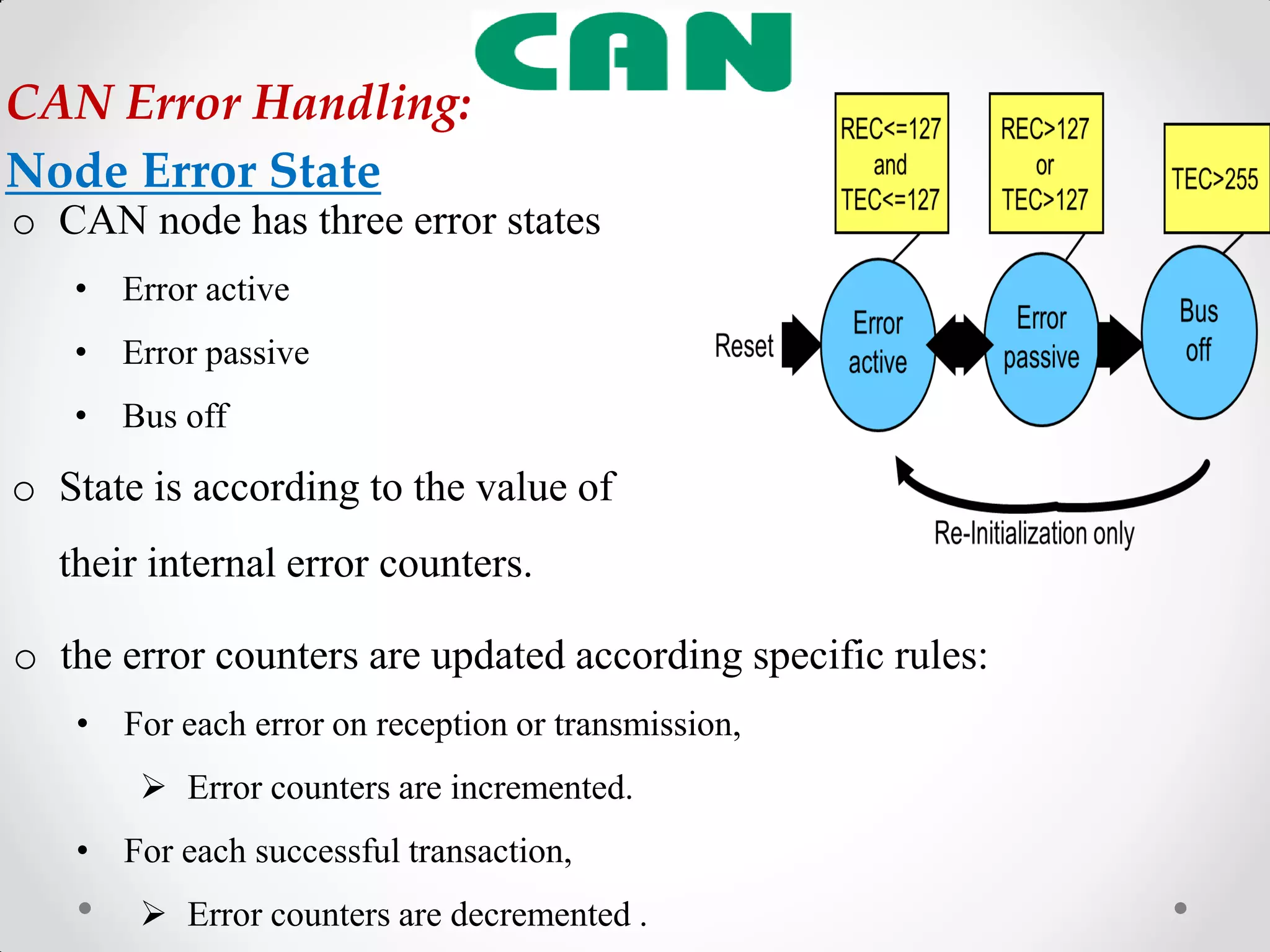
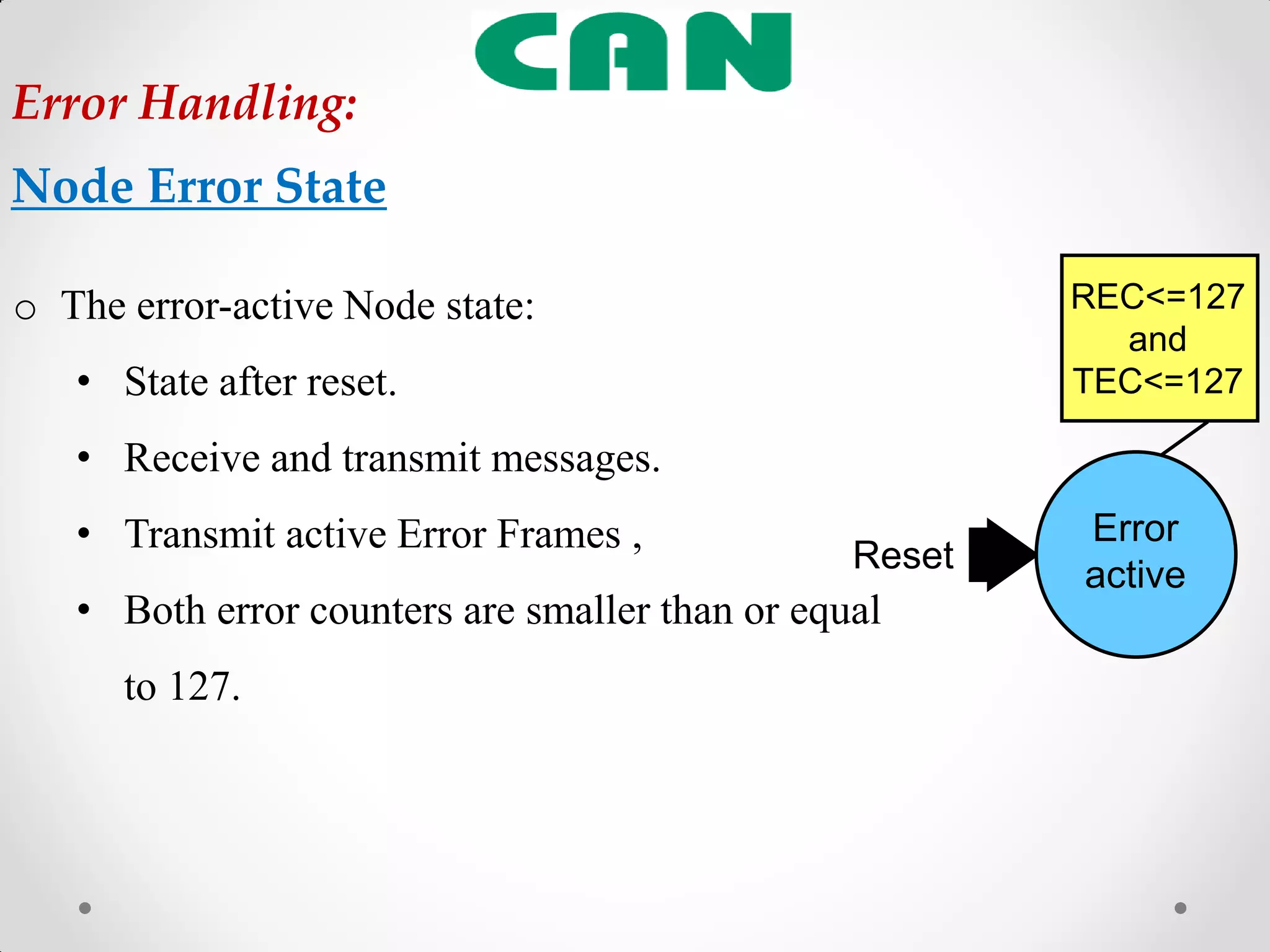




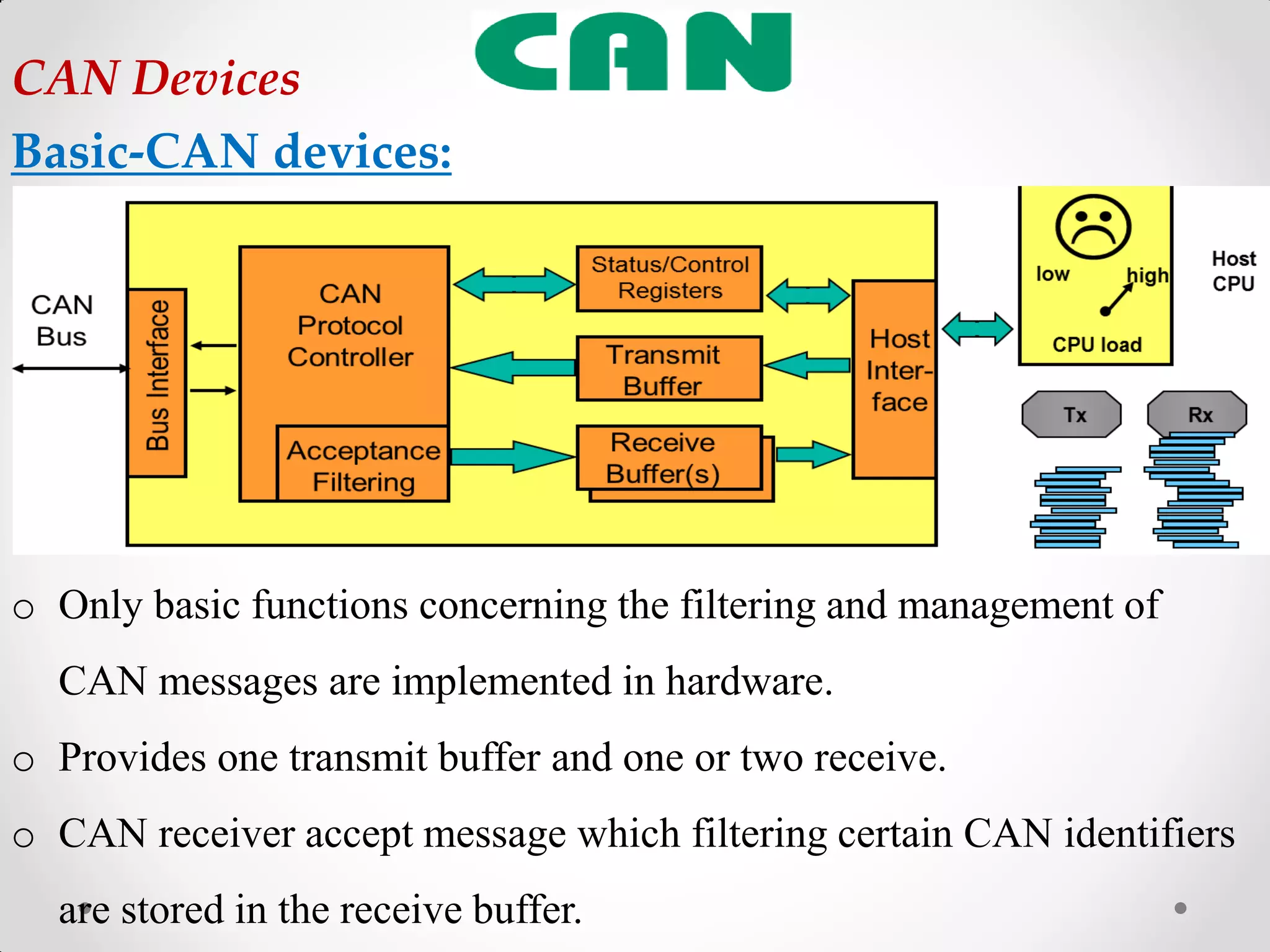
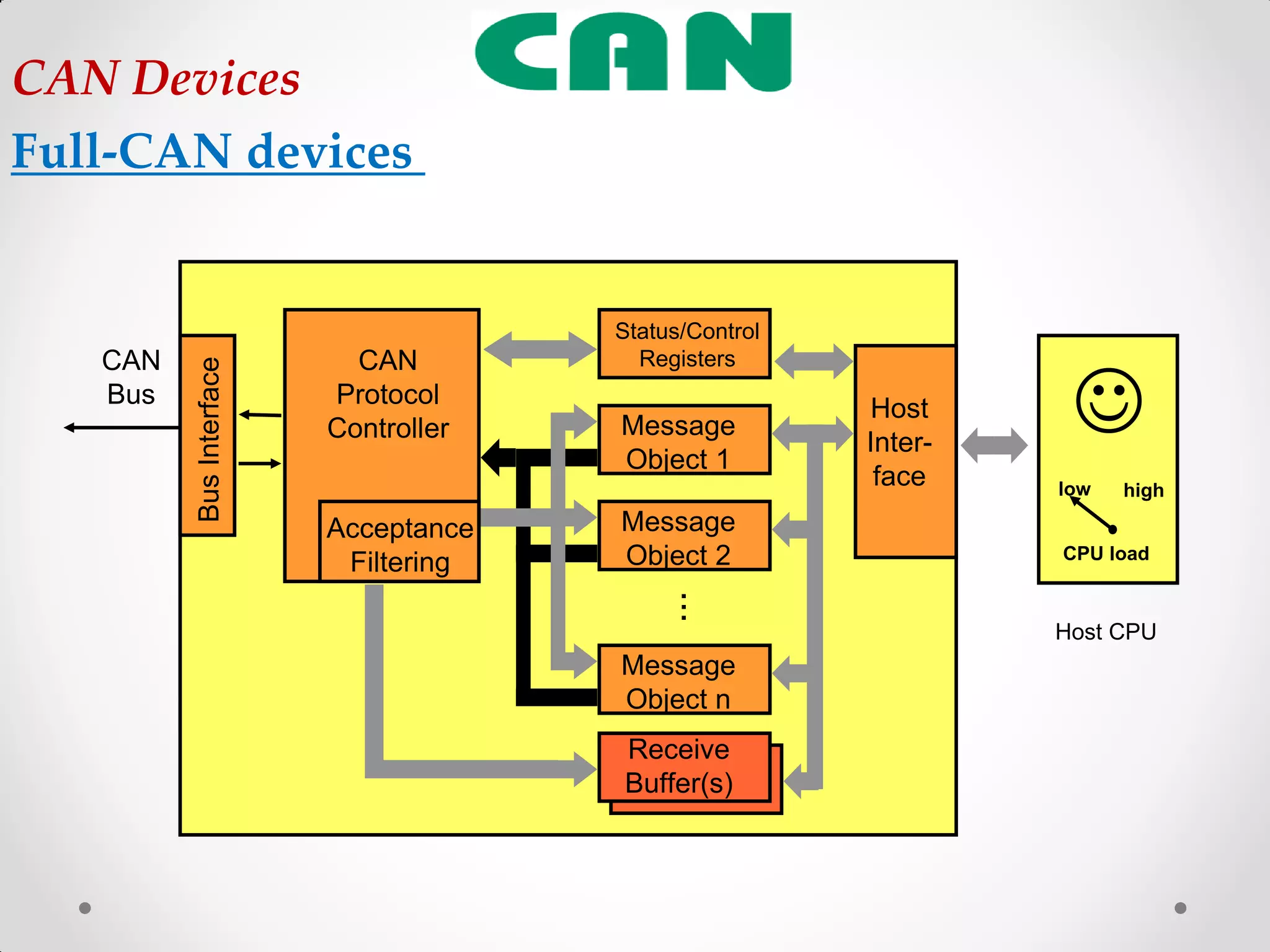



The document provides information about Controller Area Network (CAN) including its main features, applications, history, specifications, frames, error detection and handling, and devices. CAN is a serial communication protocol originally developed for motor vehicles. It supports real-time control with high error handling. CAN uses prioritized message-based communication and is widely used in automotive, industrial automation and other applications.