Downloaded 1,171 times
![AUTRONICS IN A VIEW
FIG.1 [1]](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-2-320.jpg)
![INTRODUCTION
AUTOTRONICS= AUTOMOBILE + ELECTRONICS
first electronic part in an automobile was called an ECU
(Engine control unit)
Analysts estimate that more than 80 percent of all automotive
innovation now stems from electronics
FIG.2 [2]](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-3-320.jpg)
![Braking system
EBS increases traffic safety through
reduced stopping distance and improved
brake stability.
Functions In ECB:
Anti-lock braking system (ABS):
Traction control system (TCS)
Brake lining wear control
FIG.3[3]](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-6-320.jpg)
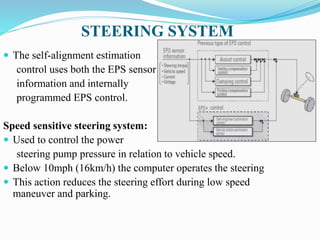
![The active roll control system contains
Control module,
Accelerometer,
Speed sensor,
Fluid reservoir,
Electrohydraulic pump,
Pressure control valve,
Directional control valve, FIG.4[4]
A hydraulic actuator in both the
front and rear stabilizer bars .](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-11-320.jpg)
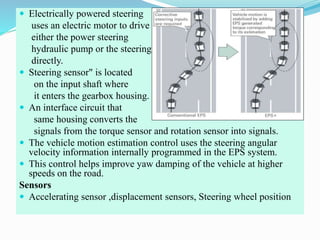
![Electronic Fuel Injection
EFI system electronically
meters the fuel so that the
exact amount needed is provided
to the engine.
EFI uses to fuel to power the
engine by pumping it forcibly FIG.5[4]
by using high pressure through a
small nozzle or valve.
A high-pressure fuel pump that produces high fuel
pressures (5 to 12 MPa)](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-13-320.jpg)
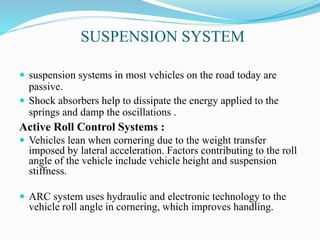
![ADAPTIVE CRUISE CONTROL
It automatically adjusts the
vehicle speed and distance to
that of a target vehicle.
ACC uses a long range radar
sensor to detect a target
vehicle up to 200 meters in
front of vehicle.
As per standard cruise control FIG.6[4]
the driver can override the system at any time.
Another advantage of this system is that the driver will not
exceed the speed limit on the highway.](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-14-320.jpg)
![Airbags
0000
FIG.7[4]
The air bag technology is based on electronic sensors that
measure the amount of quick deceleration through an
accelerometer
The new calculations will take into account the position of the
seats, the use of a seat belt and the weight of the occupants.](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-15-320.jpg)
![REFERENCE
[1] Mechanical Engineering Design by Joseph Shigley.
[2]”Applying Model-Based Design to Commercial Vehicle
Electronics Systems”; Tom Egel, Michael Burke, Michael
Carone, Wensi Jin The Math Works, Inc.; 2008.
[3] Development of EPS+; Sumio MOTOYAMA 2009.
[4] REAL TIME FUEL INJECTION IN SI ENGINE USING
ELECTRONIC INSTRUMENTATION; V. VINOTH KUMAR;
2010.](https://image.slidesharecdn.com/sandeepyadavppt-150920095842-lva1-app6892/85/autotronics-Sandeep-yadav-ppt-18-320.jpg)


This document discusses the history and applications of automotive electronics, or autotronics. It begins with an introduction defining autotronics as the combination of automobiles and electronics. The history section then outlines the timeline of electronic developments in automobiles from the 1970s introduction of engine controls to modern technologies like infotainment systems, GPS, and wireless connectivity. The document proceeds to describe several major automobile systems and how electronics are used in braking, steering, suspension, transmission, engine fuel injection, and safety features like airbags and adaptive cruise control. It concludes by discussing future research areas in automotive electronics.











































































