Downloaded 78 times





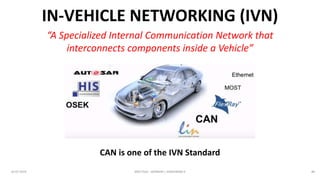
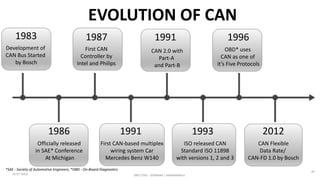
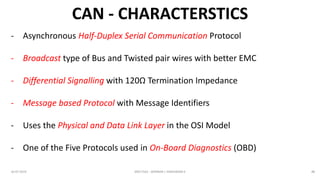
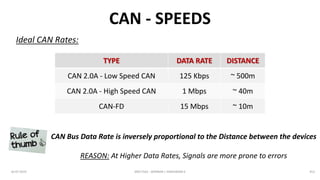
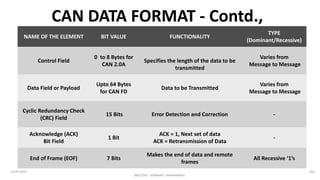

The document provides a comprehensive overview of Controller Area Network (CAN), including its introduction, evolution, characteristics, applications, and associated advantages and disadvantages. Developed by Bosch, CAN is an effective communication protocol for in-vehicle networking that interconnects various electronic control units in modern automobiles. It covers technical specifications such as data formats, speeds, error control mechanisms, and its significance in automotive technology.









































































