Download as PDF, PPTX


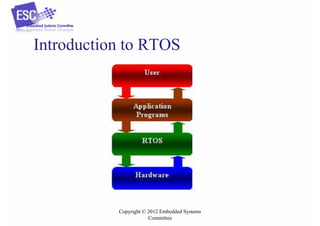
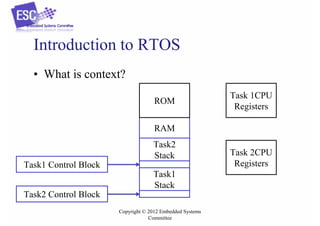
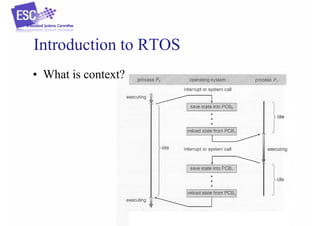
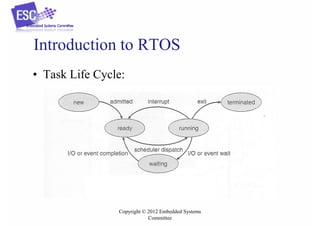
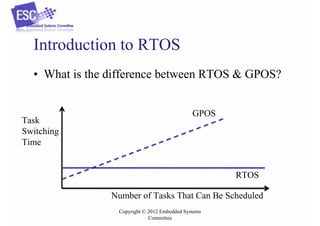
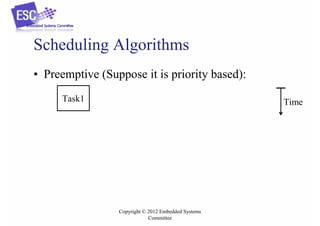
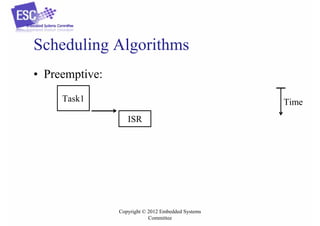
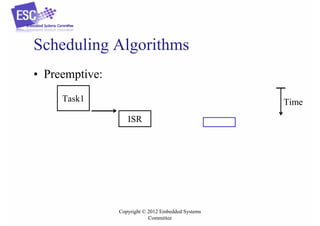
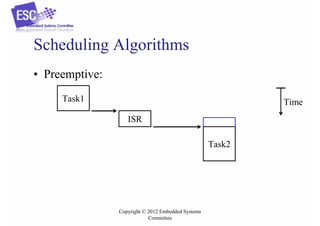
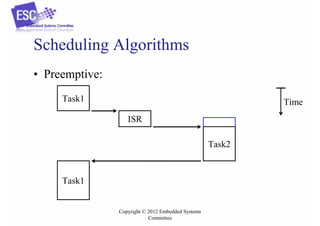
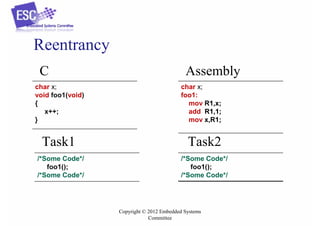
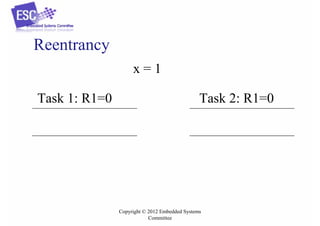
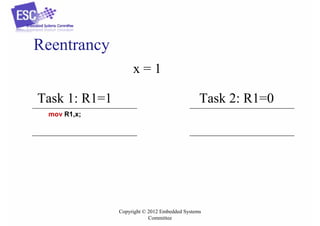
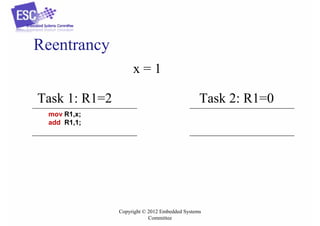
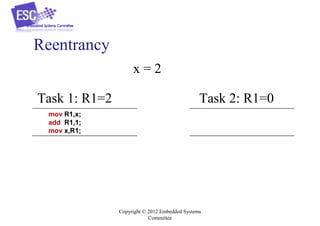
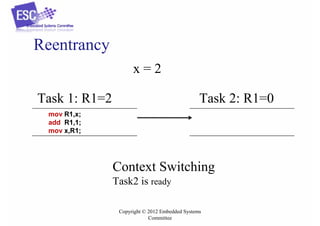

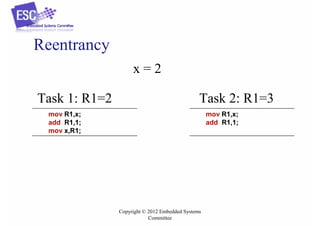
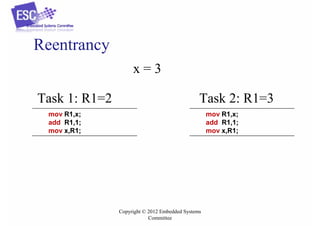
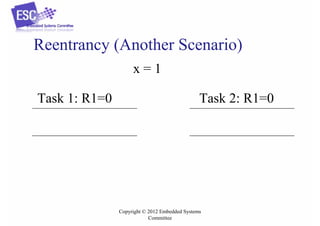
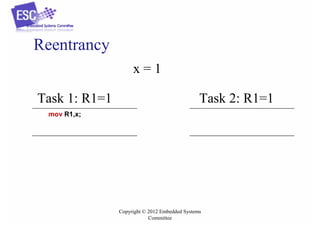
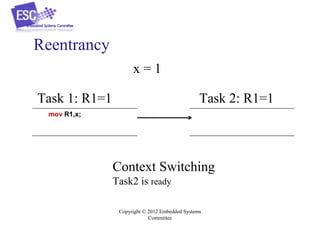
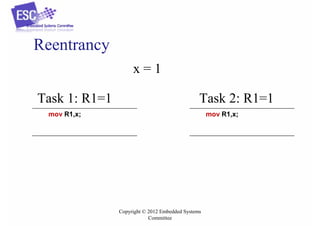
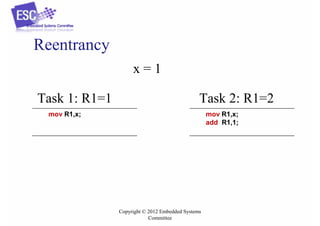
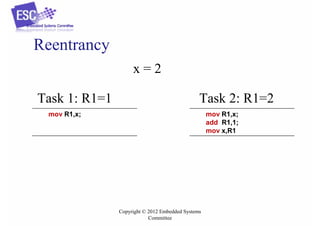
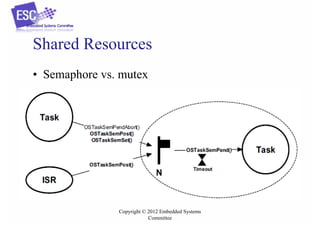
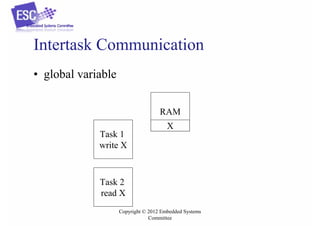
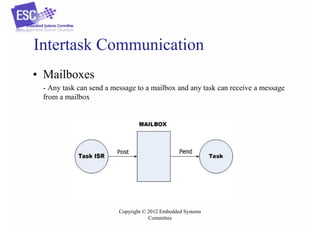
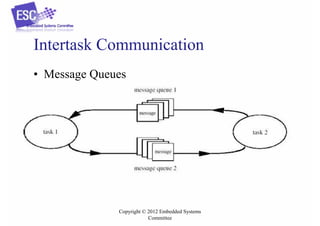

The document provides an overview of real-time operating systems (RTOS). It defines RTOS and discusses key concepts like tasks, scheduling, and shared resources. The document outlines common RTOS services such as task management, intertask communication, and timers. It also covers scheduling algorithms, reentrancy, and RTOS application programming interfaces. The goal of an RTOS is to enable predictable and reliable timing for applications with hard real-time constraints.


























































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)








