Downloaded 809 times


![CO OPERATIVE ADAPTIVE CRUISE
CONTROL [CACC]
CACC system allows the vehicles to communicate
and to work together to avoid collision.
PATH–a program of California Department of
Transportation and University of California with
companies like Honda conducted an experiment in
which three test vehicles used a communication
protocol in which the lead car can broadcast
information about its speed, acceleration ,breaking
capacity to the rest of the groups in every 20ms.](https://image.slidesharecdn.com/adaptivecruisecontrol-130911114414-phpapp02/75/Adaptive-cruise-control-11-2048.jpg)


The document discusses adaptive cruise control (ACC) systems, which use sensors and controllers to maintain a safe distance from the vehicle ahead. It describes how ACC has evolved from conventional cruise control and now uses sensors like radar and LIDAR. ACC systems process sensor data to control braking and throttling. Cooperative ACC (CACC) allows vehicle-to-vehicle communication to coordinate speeds and braking more safely. While CACC promises increased safety and efficiency, its benefits require widespread adoption and it may encourage driver complacency. Researchers continue working to develop more advanced safety systems using sensors and vehicle communication.
Introduction to cruise control concepts, development of technology from 1970s to cooperative adaptive cruise control.
Statistics on road accidents emphasizing the need for adaptive cruise control to reduce fatalities and property damage.
Details of adaptive cruise control constituents including sensor types (LIDAR, RADAR) and their roles in vehicle control.
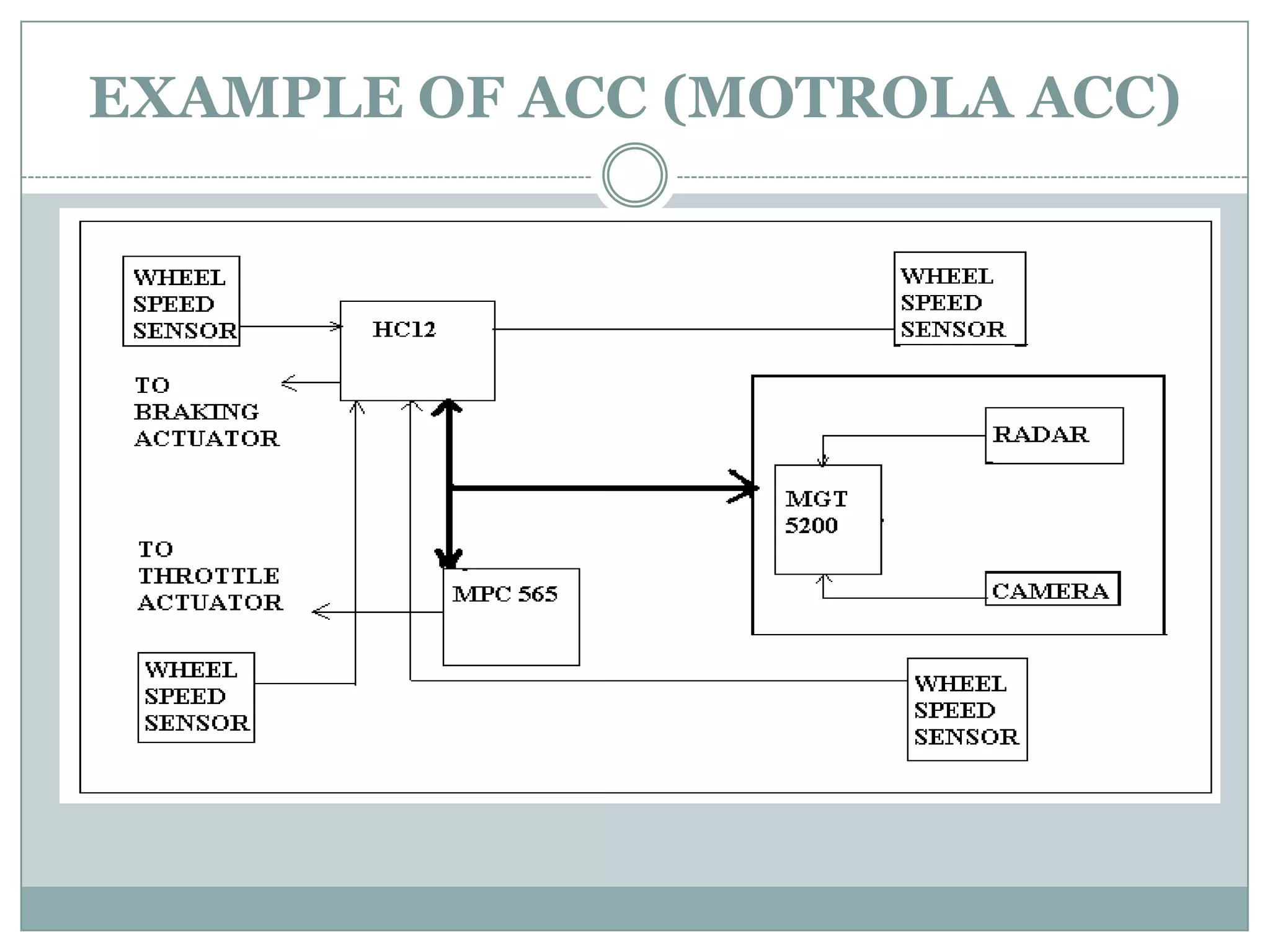
Description of Motorola's ACC, highlighting its DSP module and data processing from various sensors.
CACC allows vehicle communication for coordinated driving, improving traffic safety through shared data.
Benefits of CACC: reduction of driver workload, enhanced traffic responsiveness, and improved fuel efficiency.
Challenges facing CACC including cost, market penetration, and potential for driver carelessness.
Overview of current safety measures and advances towards intelligent vehicles with extensive sensor technology.













































































![[DevFest Strasbourg 2025] - NodeJs Can do that !!](https://cdn.slidesharecdn.com/ss_thumbnails/devfeststrasbourg2025-nodejscandothat-251127142731-da65b6fd-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Full-Stack Development] Agentic AI Architecture: Redefining Syste...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-agenticaiarchitectureredefiningsystemcommunication-251124030838-e6c70cc2-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Mobile Development] Mobile Engineer and Software Engineer: Are we...](https://cdn.slidesharecdn.com/ss_thumbnails/md-mobileengineerandsoftwareengineerarewestillrelevantsidiqpermana-251127010650-55224ef1-thumbnail.jpg?width=640&height=640&fit=bounds)


![[BDD 2025 - Artificial Intelligence] AI for the Underdogs: Innovation for Sma...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-aifortheunderdogsinnovationforsmallbusinesses-251124030839-72a599a4-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)







