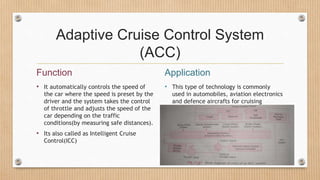
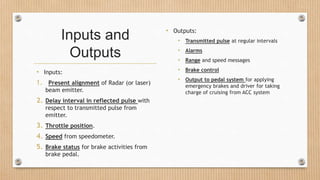
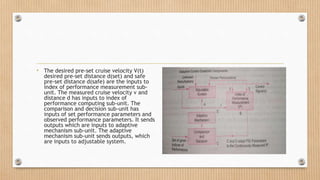
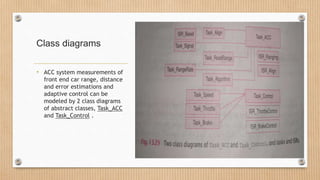
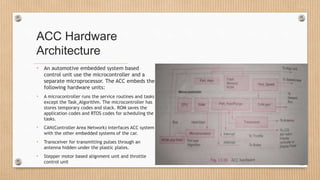
This document describes an adaptive cruise control (ACC) system for an automobile. It discusses the functions of ACC which automatically controls speed based on traffic conditions while maintaining a safe distance from the vehicle ahead. It outlines the inputs and outputs to the ACC system including radar/laser signals, throttle position, and brake status. It also describes the control panel interfaces, design metrics for testing, and how the ACC algorithm adapts the vehicle's speed and braking based on the distance to the preceding vehicle.