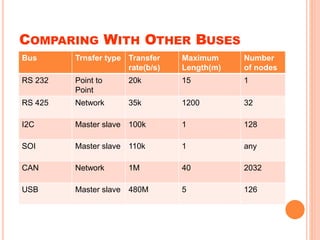
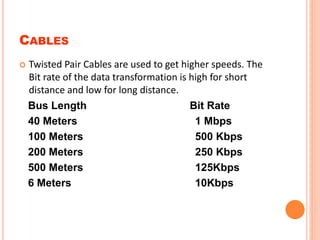
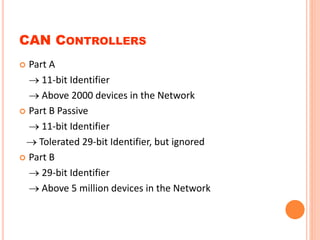
CAN (Controller Area Network) is a vehicle bus standard that allows microcontrollers and devices in a vehicle to communicate. It uses a multi-master serial bus topology and CSMA/CD with arbitration on message priority. CAN was introduced in 1986 and standardized in 1993. It supports data transmission rates up to 1Mbps over cables up to 40 meters long, connecting up to 2032 nodes. The document discusses the CAN standards, applications, layered structure, network components, frame types, and advantages/limitations.