
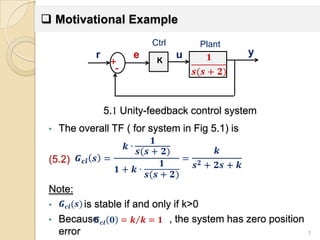





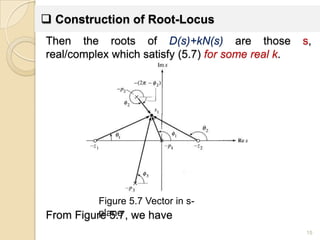















The document discusses root locus analysis and controller design techniques. 1) Root locus analysis involves plotting the trajectories of a system's closed-loop poles as a parameter (such as a controller gain) is varied. Properties of root loci like pole departure angles and asymptotes are examined. 2) Design specifications like overshoot and settling time can be translated to desired pole regions. A simple proportional controller can place poles near this region. 3) Additional controller types like integral and derivative are introduced to modify the root locus for improved steady-state response or damping. Combining controller types benefits stability.























































































