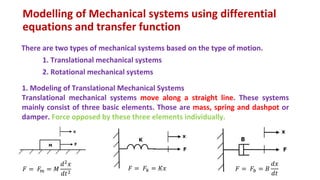
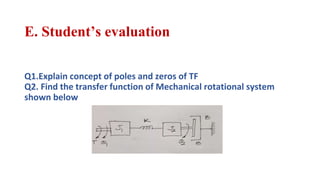
The document outlines a presentation on Control System Engineering, focusing on the concept of poles and zeros, modeling of electrical and mechanical systems using differential equations and transfer functions. It explains how poles and zeros are integral to understanding the behavior and stability of a control system, and provides methods for constructing mathematical models for different system types. The session includes learning objectives, content delivery methods, and a synopsis of electrical and mechanical modeling approaches.