Okay, here are the steps:
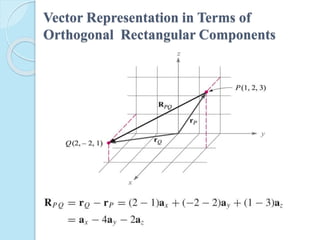
1) Given:
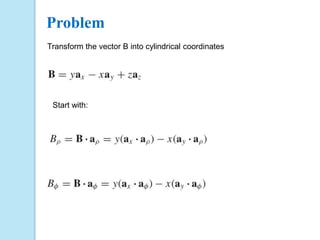
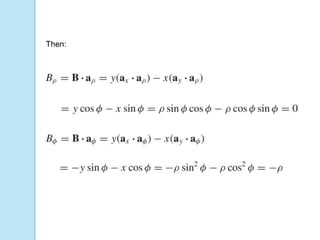
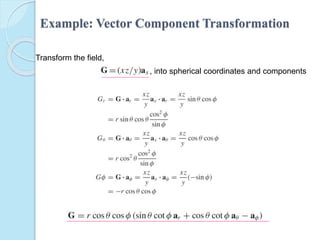
2) Transform into spherical unit vectors:
3) Write in terms of spherical components:
So the vector components in spherical coordinates are:
About Me
Aatif Saeed
Education
M.Sc Electronics
M.Sc Systems Engineering
MS Project Management
Experience
16+ Years Teaching
14+ Years Industry Projects
Email
aatifsaeed@gmail.com
4.
Course Outline
Chapter 1– 12 (5 & 7 exclusive)
Marks Distribution
Assignments – 10%
Quizzes – 10%
Class Participation – 5%
Mid Term – 25%
Final – 50%
Final Examination Question Paper
8 Review Questions out of 12
5.
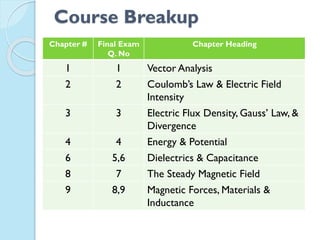
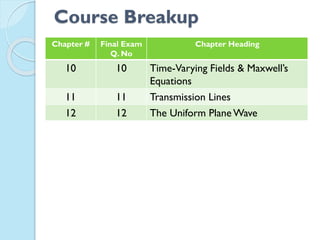
Course Breakup
Chapter #Final Exam
Q. No
Chapter Heading
1 1 Vector Analysis
2 2 Coulomb’s Law & Electric Field
Intensity
3 3 Electric Flux Density, Gauss’ Law, &
Divergence
4 4 Energy & Potential
6 5,6 Dielectrics & Capacitance
8 7 The Steady Magnetic Field
9 8,9 Magnetic Forces, Materials &
Inductance
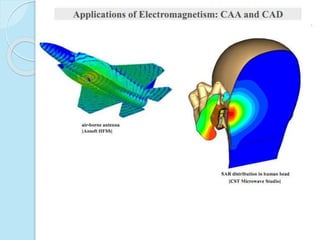
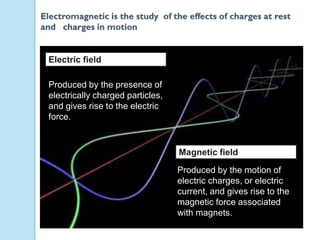
Electric field
Magnetic field
Producedby the motion of
electric charges, or electric
current, and gives rise to the
magnetic force associated
with magnets.
Electromagnetic is the study of the effects of charges at rest
and charges in motion
Produced by the presence of
electrically charged particles,
and gives rise to the electric
force.
22.
Scalars &Vectors
Scalar
Refersto a Quantity whose value may be
represented by a Single (Positive/Negative)
real number.
Body falling a distance L in Time t
TemperatureT at any point in a bowl of soup
whose co-ordinates are x, y, z
L, t,T, z, y & z are all scalars
Mass, Density, Pressure,Volume,Volume
resistivity,Voltage
23.
Scalars &Vectors
Vector
Aquantity who has both a magnitude and
direction in space.
Force,Velocity,Acceleration & a straight line
from positive to negative terminal of a storage
battery
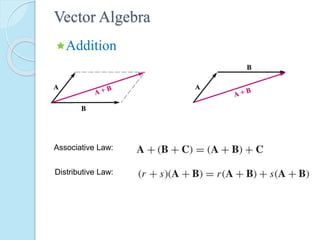
Vector Algebra
Subtraction
A– B = A + (-B)
Multiplication
Obeys Associative & Distributive laws
(r + s) (A + B) = r(A + B) + s (A + B)
= rA + rB + sA + sB
27.
Orthogonal Coordinate
Systems
A coordinatesystem defines a set of reference
directions. In a 3D space, a coordinate system can
be specified by the intersection of 3 surfaces at
each and every point in space.
The origin of the coordinate system is the
reference point relative to which we locate every
other point in space.
28.
Orthogonal Coordinate
Systems
A positionvector defines the position of a point
in space relative to the origin.
These three reference directions are referred to
as coordinate directions or base vectors, and
are usually taken to be mutually perpendicular
(orthogonal) . In this class, we use three coordinate
systems:
Cartesian
cylindrical
Spherical
29.
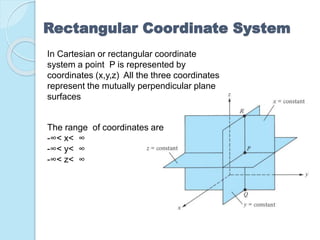
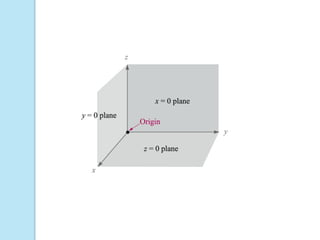
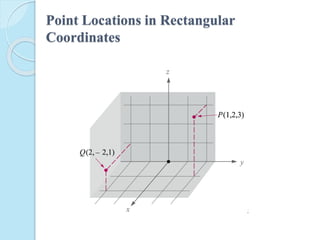
Rectangular Coordinate System
InCartesian or rectangular coordinate
system a point P is represented by
coordinates (x,y,z) All the three coordinates
represent the mutually perpendicular plane
surfaces
The range of coordinates are
-∞< x< ∞
-∞< y< ∞
-∞< z< ∞
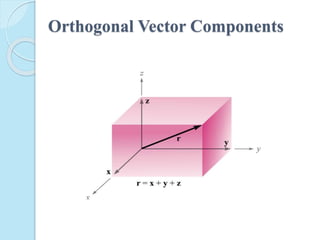
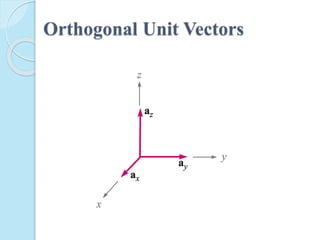
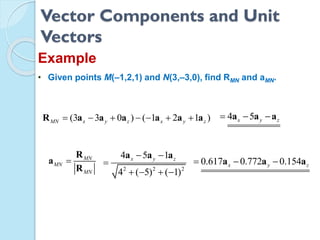
Vector Components andUnit
Vectors
Example
• Given points M(–1,2,1) and N(3,–3,0), find RMN and aMN.
(3 3 0 ) ( 1 2 1 )MN x y z x y z R a a a a a a 4 5x y z a a a
MN
MN
MN
R
a
R 2 2 2
4 5 1
4 ( 5) ( 1)
x y z
a a a
0.617 0.772 0.154x y z a a a
39.
Field
Function, which specifiesa particular
quantity everywhere in the region
Two types:
Vector Field has a direction feature
pertaining to it e.g. Gravitational field in
space and
Scalar Field has only magnitude e.g.
Temperature
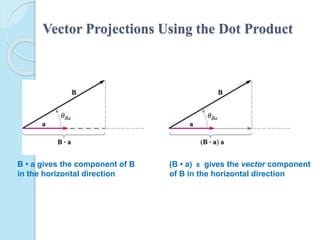
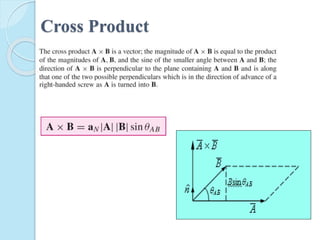
Vector Projections Usingthe Dot Product
B • a gives the component of B
in the horizontal direction
(B • a) a gives the vector component
of B in the horizontal direction
42.
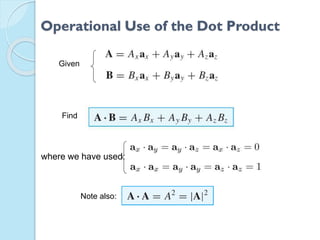
Operational Use ofthe Dot Product
Given
Find
where we have used:
Note also:
43.
The three verticesof a triangle are located at A(6,–1,2),
B(–2,3,–4), and C(–3,1,5). Find: (a) RAB; (b) RAC; (c) angle
θBAC at vertex A; (d) the vector projection of RAB on RAC.
Drill Problem
44.
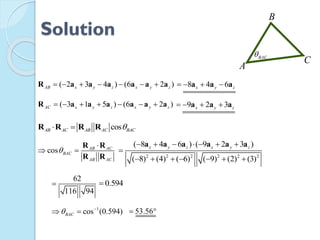
Solution
( 2 34 ) (6 2 )AB x y z x y z R a a a a a a 8 4 6x y z a a a
( 3 1 5 ) (6 2 )AC x y z x y z R a a a a a a 9 2 3x y z a a a
A
B
CBAC
cosAB AC AB AC BAC R R R R
cos AB AC
BAC
AB AC
R R
R R 2 2 2 2 2 2
( 8 4 6 ) ( 9 2 3 )
( 8) (4) ( 6) ( 9) (2) (3)
x y z x y z
a a a a a a
62
116 94
1
cos (0.594)BAC
53.56
0.594
45.
Continued …
onABAC AB AC AC R R R a a
2 2 2 2 2 2
( 9 2 3 ) ( 9 2 3 )
( 8 4 6 )
( 9) (2) (3) ( 9) (2) (3)
x y z x y z
x y z
a a a a a a
a a a
( 9 2 3 )62
94 94
x y z
a a a
5.963 1.319 1.979x y z a a a
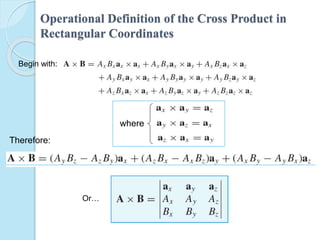
Operational Definition ofthe Cross Product in
Rectangular Coordinates
Therefore:
Or…
Begin with:
where
48.
The Cross Product
Example
GivenA = 2ax–3ay+az and B = –4ax–2ay+5az, find AB.
( ) ( ) ( )y z z y x z x x z y x y y x zA B A B A B A B A B A B A B a a a
( 3)(5) (1)( 2) (1)( 4) (2)(5) (2)( 2) ( 3)( 4)x y z a a a
13 14 16x y z a a a
49.
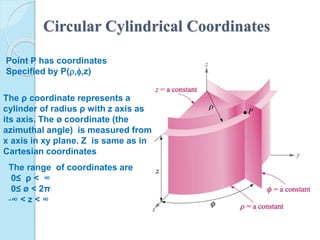
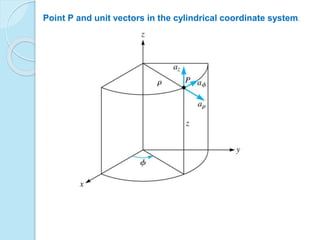
Circular Cylindrical Coordinates
PointP has coordinates
Specified by P(z)
The ρ coordinate represents a
cylinder of radius ρ with z axis as
its axis. The ø coordinate (the
azimuthal angle) is measured from
x axis in xy plane. Z is same as in
Cartesian coordinates
The range of coordinates are
0≤ ρ < ∞
0≤ ø < 2π
-∞ < z < ∞
a
za
a
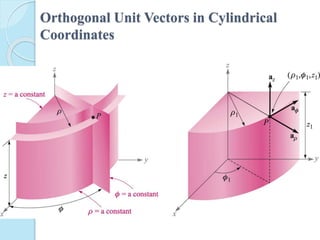
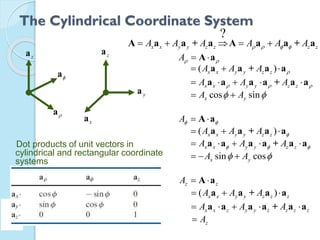
The Cylindrical CoordinateSystem
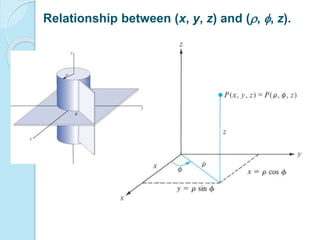
Dot products of unit vectors in
cylindrical and rectangular coordinate
systems
ya
za
xa
A A a
( )x x y y z zA A A a a + a a
x x y y z zA A A a a a a + a a
cos sinx yA A
A A a
( )x x y y z zA A A a a + a a
x x y y z zA A A a a a a + a a
sin cosx yA A
z zA A a
( )x x y y z z zA A A a a + a a
x x z y y z z z zA A A a a a a + a a
zA
?
x x y y z z z zA A A A A A A a a + a A a a + a
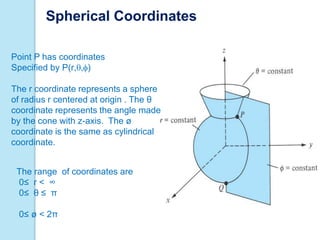
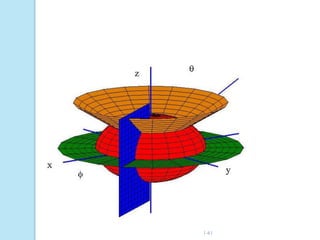
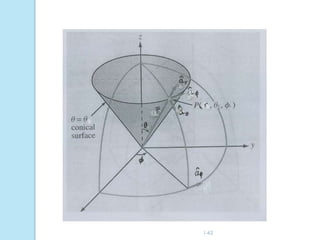
The r coordinaterepresents a sphere
of radius r centered at origin . The θ
coordinate represents the angle made
by the cone with z-axis. The ø
coordinate is the same as cylindrical
coordinate.
The range of coordinates are
0≤ r < ∞
0≤ θ ≤ π
0≤ ø < 2π
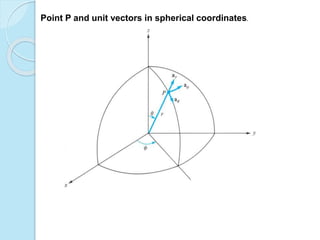
Point P has coordinates
Specified by P(r)
Spherical Coordinates
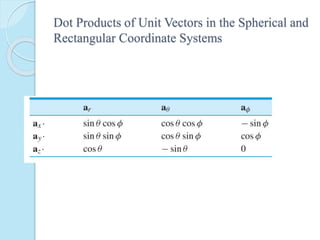
Dot Products ofUnit Vectors in the Spherical and
Rectangular Coordinate Systems
68.
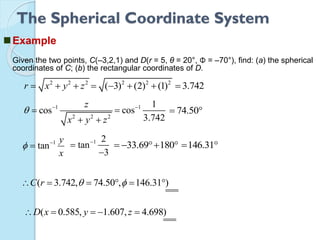
The Spherical CoordinateSystem
Example
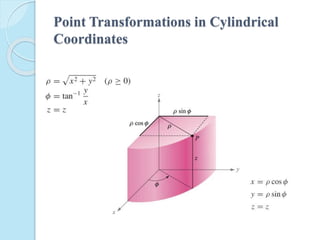
Given the two points, C(–3,2,1) and D(r = 5, θ = 20°, Φ = –70°), find: (a) the spherical
coordinates of C; (b) the rectangular coordinates of D.
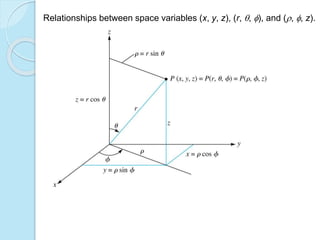
2 2 2
r x y z
1
2 2 2
cos
z
x y z
1
tan
y
x
2 2 2
( 3) (2) (1) 3.742
1 1
cos
3.742
74.50
1 2
tan
3
33.69 180 146.31
( 3.742, 74.50 , 146.31 )C r
( 0.585, 1.607, 4.698)D x y z
69.
Example: Vector ComponentTransformation
Transform the field,
, into spherical coordinates and components