This document discusses the Z-transform and its application in digital signal processing. It covers topics such as:
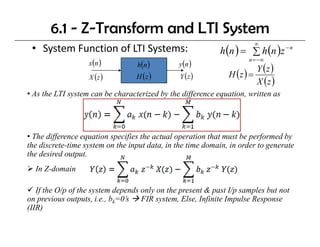
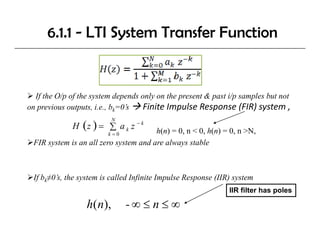
1) Defining the Z-transform and how it can characterize linear time-invariant (LTI) systems.
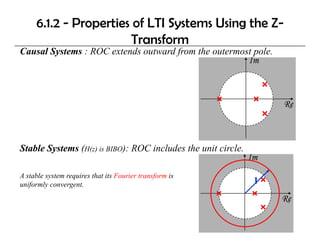
2) Properties of LTI systems in the Z-domain, including causal and stable systems.
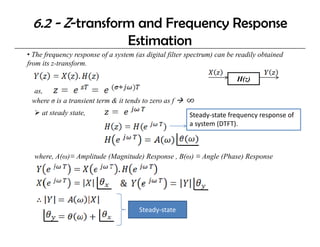
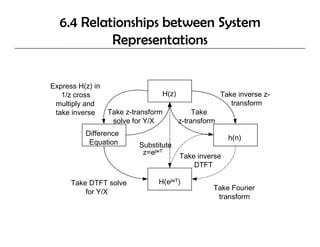
3) How the frequency response of a system can be obtained from its Z-transform.
4) Methods for finding the inverse Z-transform, including power series and partial fraction expansion.
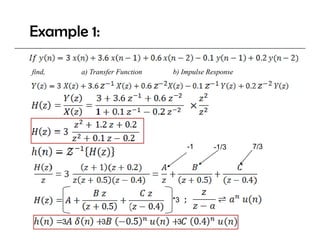
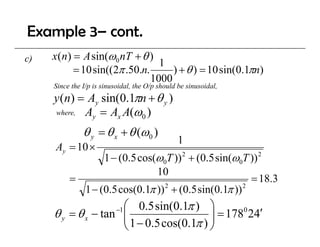
5) Examples of using these techniques to analyze simple discrete systems.
![6.3 - The Inverse Z-Transform – cont.
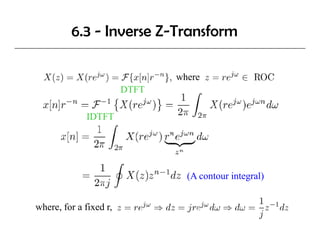
• There is an inversion integral for the z transform,
1
x[n ] = X(z)z n−1dz
j2π ∫
C
but doing it requires integration in the complex plane and
it is rarely used in engineering practice.
• There are two other common methods,
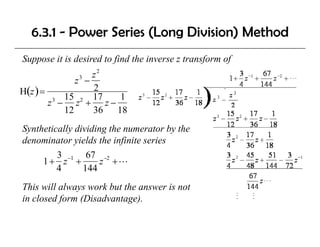
Power series method (long division method)
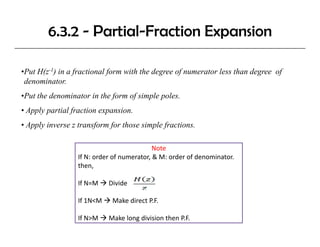
Partial-Fraction Expansion
p](https://image.slidesharecdn.com/dsp-u-lec06thez-transformanditsapplication-100105094909-phpapp01/85/Dsp-U-Lec06-The-Z-Transform-And-Its-Application-8-320.jpg)


![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)

![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)