Downloaded 48 times





![E3145/6/14
THE TRANSFER FUNCTION
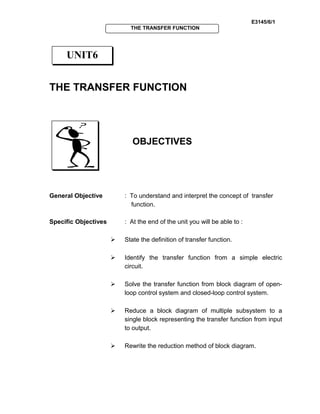
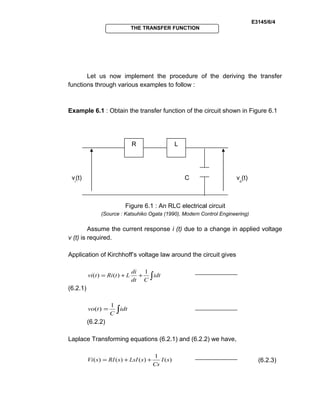
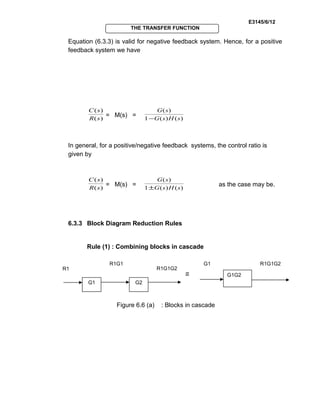
Rule (4) : Moving a take-off point ahead of a block
≡
Figure 6.6 (d) : Moving a take-off point ahead of a block
Rule (5) : Moving a summing point after a block
≡
Figure 6.6 (e) : Moving a summing point after a block
R
G
RG
RG
G
G
RG
RG
R
R1
R2
R1R2
G
G[R1R2]
G
R1
+
R1G+
G
±
G[R1R2]
R2G
R2
±](https://image.slidesharecdn.com/e3145basiccontrolsystemunit6-140501035547-phpapp02/85/Basic-Control-System-unit6-14-320.jpg)
![E3145/6/18
THE TRANSFER FUNCTION
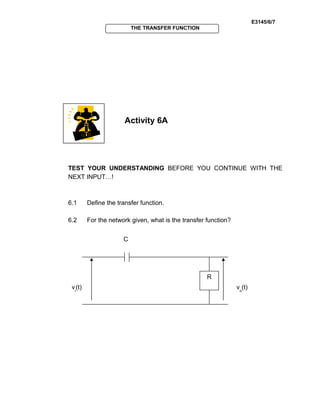
(c)
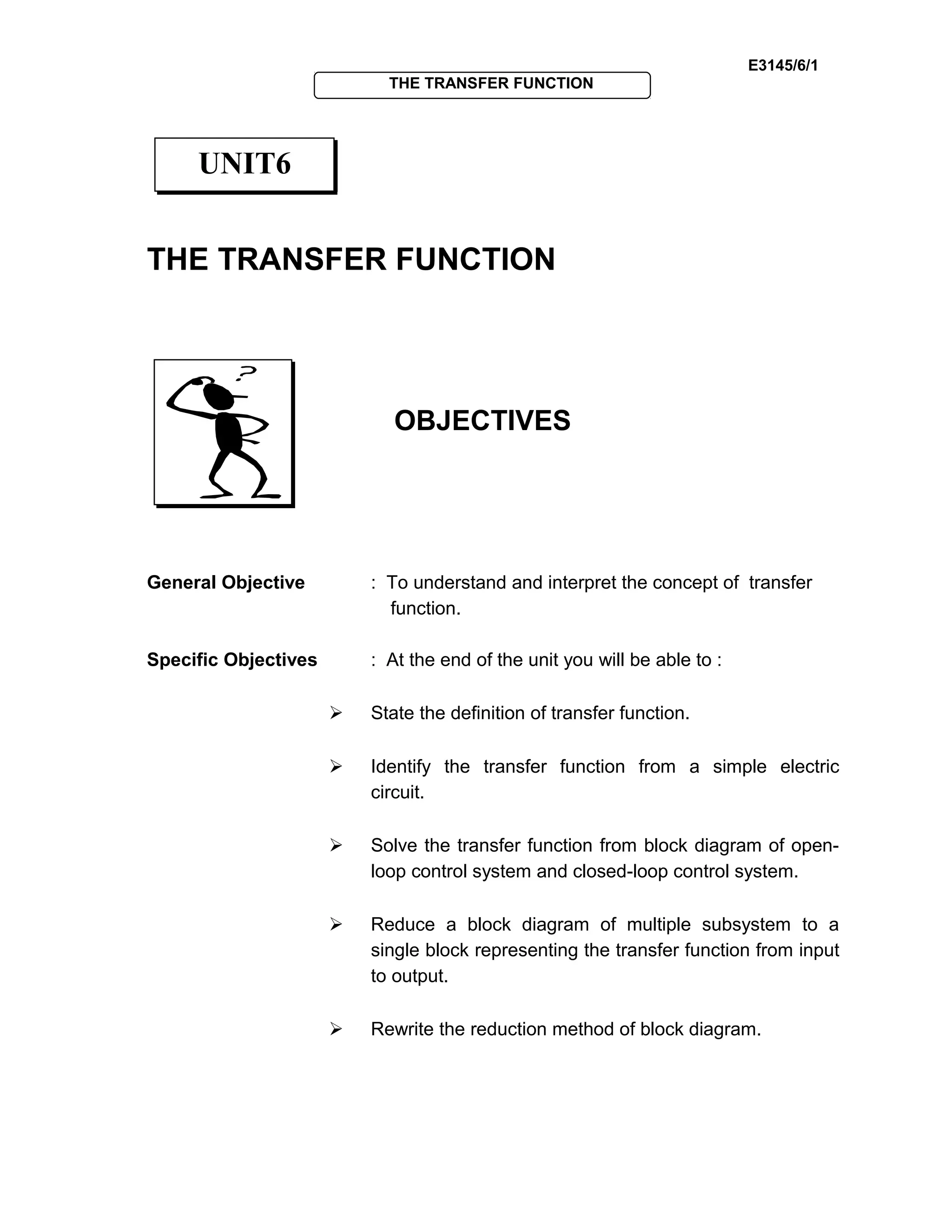
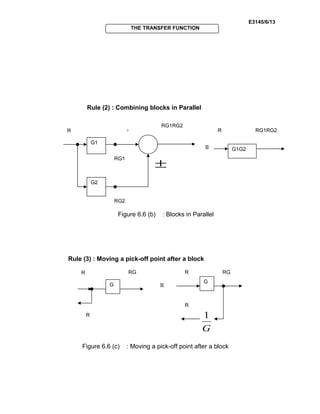
Figure 6.8 (a,b,c) : Steps to reduce the block diagram
(Source : Katsuhiko Ogata (1990), Modern Control Engineering)
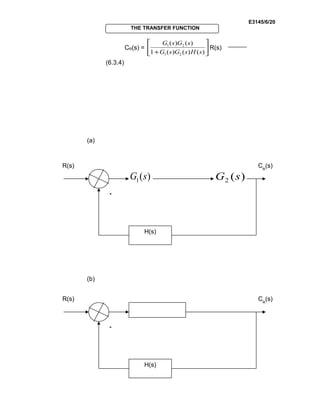
Steps to reduce the block diagram :
(Figure6.8(a)) collapse summing junctions;
(Figure6.8(b)) form equivalent cascaded system in the forward
path and equivalent parallel system in the
feedback path;
(Figure6.8(c)) form equivalent feedback system and multiply by
cascaded G1(s)
Finally, the feedback system is reduced and multiplied by G1(s) to
yield the equivalent transfer function shown in Figure 6.7 (c ).
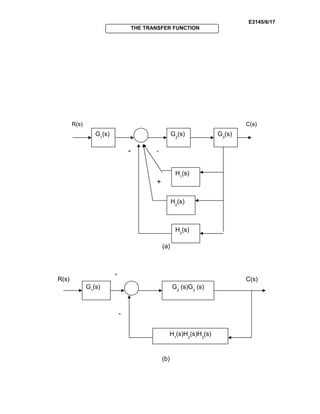
6.3.5 Block Diagram of Two Input System
In the present of more than one input to a system, the system may be
a single output system called a multiple-input-single-output (MISO) system or
[ ])()()()()(1
)()()(
32132
123
sHsHsHsGsG
sGsGsG
+−+
R(s) C(s)](https://image.slidesharecdn.com/e3145basiccontrolsystemunit6-140501035547-phpapp02/85/Basic-Control-System-unit6-18-320.jpg)




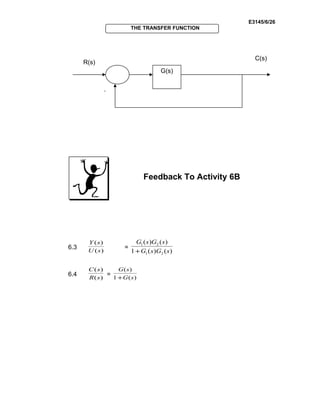



This document discusses transfer functions and their derivation from electrical circuits and control systems. It begins by defining a transfer function as the ratio of the Laplace transform of the output variable to the Laplace transform of the input variable. Examples are then given of deriving transfer functions from simple RLC circuits by applying Kirchhoff's laws and taking the Laplace transform. The document also discusses deriving transfer functions from block diagrams of open-loop and closed-loop control systems and provides rules for reducing complex block diagrams to a single transfer function relating the input to the output.
![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)