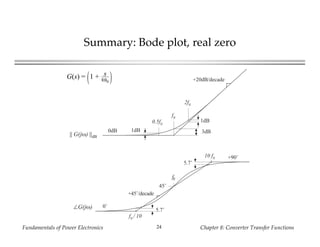
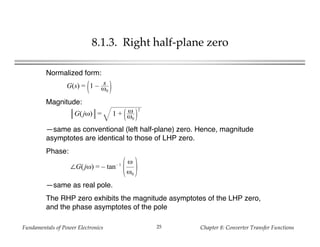
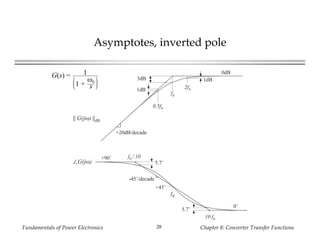
Chapter 8 discusses converter transfer functions and Bode plots. It reviews common transfer function elements like poles, zeros and their impact on Bode plots. Specific topics covered include the single pole response, single zero response, right half-plane zeros, and combinations of elements. It also discusses how to analyze converter transfer functions, construct them graphically, and measure real converter transfer functions and impedances. The chapter aims to provide engineers with the tools needed to model, analyze and design power converters.






































![Fundamentals of power electronics [presentation slides] 2nd ed r. erickson ww](https://cdn.slidesharecdn.com/ss_thumbnails/fundamentalsofpowerelectronicspresentationslides2nded-r-ericksonww-100522135011-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)









































