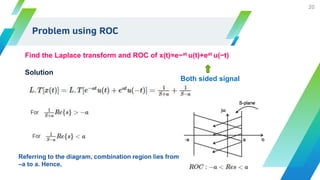
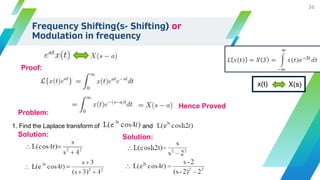
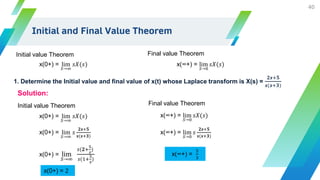
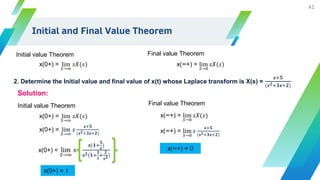
The document discusses the Laplace transform and its properties. It begins by introducing Laplace transform as a tool to transform signals from the time domain to the complex frequency (s-domain). It then provides the Laplace transforms of some elementary signals like impulse, step, ramp functions. It discusses properties like linearity, time shifting, frequency shifting. It also covers the region of convergence, causality, stability analysis using poles in the s-plane. The document provides examples of finding the Laplace transform and analyzing signals based on properties like time shifting and frequency shifting. In the end, it summarizes the convolution property and the initial and final value theorems.



![Laplace transform for elementary signals
1)
Solution
2)
Solution
7
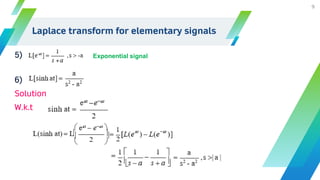
Impulse signal
L[δ(t)]
Step signal
L[u(t)]](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-7-320.jpg)
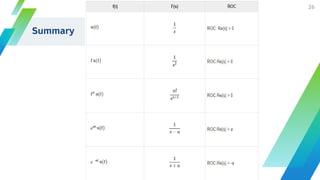
![Summary
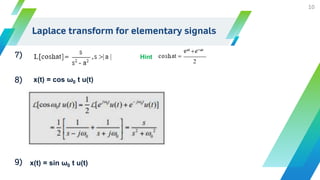
Impulse
Step
12
L[δ(t)] 1
L[u(t)]
1/s
a= ω0
L[1]](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-12-320.jpg)
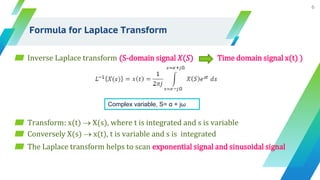
![Complex S Plane
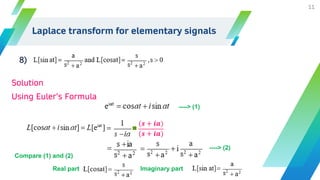
▰ The most general form of Laplace
transform is
▰ L[x(t)]= X(s) =
𝑵(𝑺)
𝑫(𝑺)
14
LHS RHS
- ∞ 0 ∞
jω
σ
Complex variable, S= α + jω
The zeros are found by setting the numerator polynomial to Zero
The Poles are found by setting the Denominator polynomial to Zero](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-14-320.jpg)
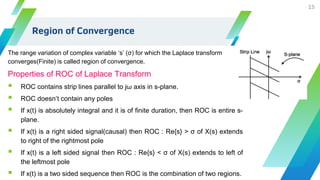
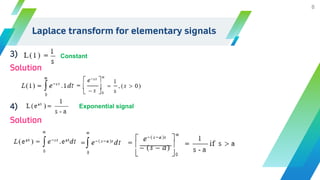
![Properties of ROC of Laplace Transform
▰ ROC doesn’t contain any poles
▰ If x(t) is absolutely integral and it is of finite duration, then ROC is entire
s-plane.
16
L[e-2t u(t)] 1/(s+2)
1/(-2+2)
Poles, S=-2 = 1/0 = ∞
-a a
x(t)
ROC includes
imaginary axis jω
- ∞ 0 ∞
jω
σ
Impulse signal have ROC is entire S plane](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-16-320.jpg)
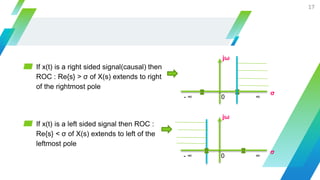
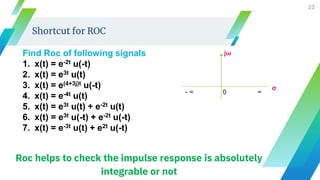
![Shortcut for ROC
▰ Step 1: Compare real part of S complex variable (σ) with real part of
coefficient of power of e
▰ Step 2: Check if the signal is left sided or right sided, then decide < or >
21
Consider L[e-2t u(t)]
Step 1 : σ = -2
Step 2 : σ > -2
ROC is](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-21-320.jpg)
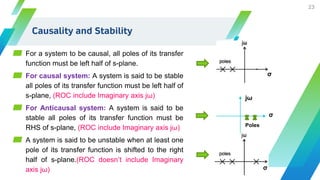
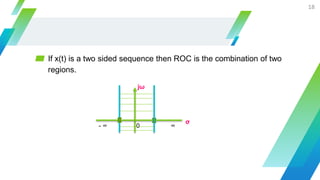
![Causality and Stability
25
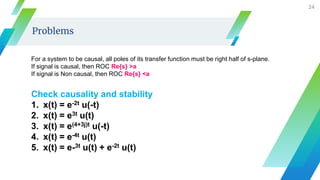
5. Find the LT and ROC of x(t)=e−3t u(t)+e-2t u(t), Check causality and stability
Solution:
L[x(t)= L[e−3t u(t)+e-2t u(t)]
X(s) =
1
(𝑠+3)
+
1
(𝑠+2)
ROC: Re{s} =σ >-3, Re{s} =σ >-2
ROC: Re{s} =σ >-2
- ∞ -3 -2 0 ∞
jω
σ
Both will converged if Re{s} =σ >-2
Causal and stable](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-25-320.jpg)



![Linearity
30
Proof:
x(t) X(s)
Problem Hence Proved
1. Find the Laplace transform of x(t) = 2δ(t)+ 3 u(t)
L[δ(t)] 1
L[u(t)] 1/s
L[x(t)] = L[2δ(t)+ 3 u(t)] = X(s) = 2 L[δ(t)] + 3 L[u(t)]
X(s) = 2+ 3(1/s)
y(t) Y(s)](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-30-320.jpg)
![Problem : Time shifting
1. Using Time shifting property, solve
33
Solution: x(t) X(s)
L[u(t-3)] =
𝑒−3𝑠
𝑠
L[u(t-3)]
Using Time shifting property
Given : t0 =3
L[u(t-3)] = X(s) = −∞
∞
𝑢(𝑡 − 3)𝑒−𝑠𝑡
𝑑𝑡
= 3
∞
𝑒−𝑠𝑡
𝑑𝑡
=
𝑒−𝑠𝑡
−𝑠
∞
3
L[u(t-3)] = X(s) = 0
∞
𝑢(𝑡 − 3)𝑒−𝑠𝑡
𝑑𝑡
=
1
−𝑠
𝑒−∞
− 𝑒−3𝑠
𝑒−∞
= 0
L[u(t-3)] =
𝑒−3𝑠
𝑠
L[u(t)] =
1
𝑠
Wkt](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-33-320.jpg)
![2. solve
37
Solution:
= e-6 L[e-3(t-2) u(t-2)]
Given : t0 =2
= e-6 L[e-3t] e-2s
Wkt, L[e-at ] = (1/s+a)
= e-2s e-6(1/s+3)
=
e−(2s+6)
(s+3)
=
e−2(s+3)
(s+3)
x(t) X(s)
= L[e-3(t-2+2) u(t-2)]
L[u(t-2)] =
𝑒−2𝑠
𝑠
Sub : s by s+3
=
𝑒−2(𝑠+3)
(𝑠+3)
Problem : Frequency Shifting+ Time Shifting](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-37-320.jpg)
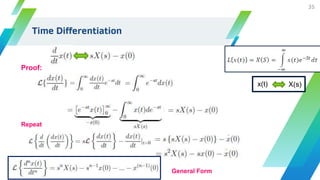
![Frequency Differentiation
38
X(s)
x(t)
1.Determine LT of
Solution:
n=1
L[t u(t)] = (-1)
𝑑
𝑑𝑠
L[u(t)]
Wkt
L[u(t)] = 1/s
= (-1)
𝑑
𝑑𝑠
(
1
𝑠
)
= (-1)
𝑑
𝑑𝑠
( 𝑠−1
)
= (-1) ( −𝑠−2
)
= 1/𝑠2
L[t u(t)]
L[t2 u(t)]= 2/𝑠3
Similarly
Ramp signal
Parabolic signal](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-38-320.jpg)
![Convolution Theorem
39
L[x1(t) * x2(t)] X1(s) . X2(s)
1.Consider x1(t) = u(t) and x2(t) =𝑒−5𝑡
u(t)
Y(s) = X1(s) . X2(s)
L[x1(t)] =
1
𝑠
L[x2(t)] =
1
𝑠+5
Y(s) =
𝐴
𝑠
+
𝐵
𝑠+5
Y(s) =
1
𝑠
.
1
𝑠+5
=
𝐴 𝑠+5 +𝐵𝑠
𝑠(𝑆+5)
Y(s) =
1
𝑠(𝑠+5)
Sub s=0
A= 1/5
Sub s=-5
B= -1/5
Y(s) =
1/5
𝑠
+
−1/5
𝑠+5
Sub A and B in (1)
(1)
ILT [Y(s)] = y(t)
y(t) =
1
5
u(t) -
1
5
𝑒−5𝑡
u(t)](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-39-320.jpg)
![Inverse Laplace transform using Partial
fraction
42
Partial fraction
types
01
L[eat]u(t) = Roc, Re{s} σ > a
L[-e-at]u(-t) = Roc, Re{s} σ < a
02
03](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-42-320.jpg)
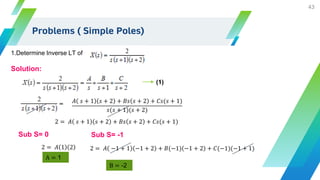
![44
Sub S= -2
2 = 𝐴 −2 + 1 −2 + 2 + 𝐵(−2) −2 + 2 + 𝐶(−2)(−2 + 1)
C = 1
Sub A, B and C in (1)
X(s) =
𝐴
𝑠
+
𝐵
(𝑠 + 1)
+
𝐶
(𝑠 + 2)
X(s) =
1
𝑠
+
−2
(𝑠 + 1)
+
1
(𝑠 + 2)
ILT [X(s)] = x(t)
x(t) =𝑢 𝑡 − 2 𝑒−𝑡
𝑢 𝑡 + 𝑒−2𝑡
𝑢(𝑡)
𝑒−𝑎𝑡
𝑢 𝑡 =
1
(𝑠 + 𝑎)](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-44-320.jpg)

![46
2 = 𝐴 𝑠 + 1 (𝑠 + 2)2
+𝐵𝑠(𝑠 + 2)2
+ 𝐶𝑠 𝑠 + 1 + 𝐷𝑠(𝑠 + 1)(𝑠 + 2)
2 = 𝐴 𝑠 + 1 (𝑠2
+ 2𝑠 + 4) + 𝐵𝑠(𝑠2
+ 2𝑠 + 4) + 𝐶𝑠 𝑠 + 1 + 𝐷𝑠(𝑠2
+ 3𝑠 + 2)
2 = 𝐴𝑠3
+ 2𝐴𝑠2
+ 4𝐴𝑠 + 𝐴𝑠2
+ 2𝐴𝑠 + 4𝐴 + 𝐵𝑠3
+ 2𝐵𝑠2
+ 4𝐵𝑠 + 𝐶𝑠2
+ 𝐶𝑠 + 𝐷𝑠3
+ 3𝐷𝑠2
+ 2𝐷𝑠)
Equating 𝑡ℎ𝑒 𝑐𝑜𝑒𝑓𝑓𝑖𝑐𝑒𝑛𝑡 𝑜𝑓 𝑠3
0= A+B+D
0= 0.5-2+D D= 1.5 or 3/2
X(s) =
𝐴
𝑠
+
𝐵
(𝑠+1)
+
𝐶
(𝑠+2)2 +
𝐷
𝑠+2
Sub A,B,C and D in (1)
X(s) =
0.5
𝑠
−
2
(𝑠+1)
+
1
(𝑠+2)2 +
1.5
𝑠+2
x(t) =0.5𝑢 𝑡 − 2 𝑒−𝑡
𝑢 𝑡 + 𝑡𝑒−2𝑡
𝑢 𝑡 + 1.5 𝑒−2𝑡
𝑢 𝑡
ILT [X(s)] = x(t)](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-46-320.jpg)
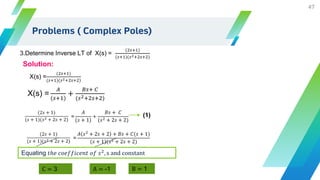
![48
X(s) =
𝐴
(𝑠 + 1)
+
𝐵𝑠 + 𝐶
(𝑠2 + 2𝑠 + 2)
(1)
Sub A,B and C in (2)
X(s) =
𝐴
(𝑠 + 1)
+
𝐵𝑠 + 𝐶
(𝑠 + 1)2 + 1)
(2)
X(s) =
−1
(𝑠 + 1)
+
𝑠 + 3
(𝑠 + 1)2 + 1)
X(s) =
−1
(𝑠 + 1)
+
𝑠 + 1 + 2
(𝑠 + 1)2 + 1
X(s) =
−1
(𝑠+1)
+
𝑠+1
(𝑠+1)2+1
+
2
(𝑠+1)2+1
ILT [X(s)] = x(t) x(t) =𝑒−𝑡
𝑢 𝑡 − 𝑒−𝑡
cos 𝑡 𝑢 𝑡 + 2𝑒−𝑡
sin 𝑡 𝑢 𝑡
L[𝑒−𝑎𝑡
cos t] 𝑠 + 𝑎
(𝑠 + 𝑎)2 + 𝑎2
L[𝑒−𝑎𝑡
sin t]
𝑎
(𝑠 + 𝑎)2 + 𝑎2
Problems ( Complex Poles)](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-48-320.jpg)
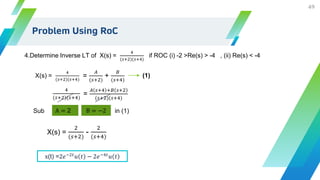
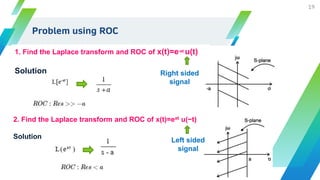
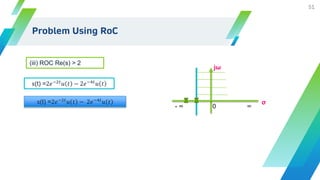
![50
(i) ROC -2 >Re(s) > -4
(ii) ROC Re(s) < -4
x(t) = −2𝑒−2𝑡
𝑢 −𝑡 − 2𝑒−4𝑡
𝑢 𝑡
x(t) =2𝑒−2𝑡
𝑢 𝑡 − 2𝑒−4𝑡
𝑢 𝑡
- ∞ 0 ∞
jω
σ
Re(s)<-2 and Re(s)> -4
L[eat]u(t) = Roc, Re{s} σ > a
L[-e-at]u(-t) = Roc, Re{s} σ < a
x(t) =2𝑒−2𝑡
𝑢 𝑡 − 2𝑒−4𝑡
𝑢 𝑡
- ∞ 0 ∞
jω
σ
x(t) = −2𝑒−2𝑡
𝑢 −𝑡 + 2𝑒−4𝑡
𝑢 −𝑡
Problem Using RoC](https://image.slidesharecdn.com/laplacetransform-210315172515/85/EC8352-Signals-and-Systems-Laplace-transform-50-320.jpg)





















![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)


















![CHAPTER LAPLACE TRANSFORM [Được lưu tự động].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapterlaplacetransformclutng-230102000908-d6e0e181-thumbnail.jpg?width=640&height=640&fit=bounds)



























