Download to read offline
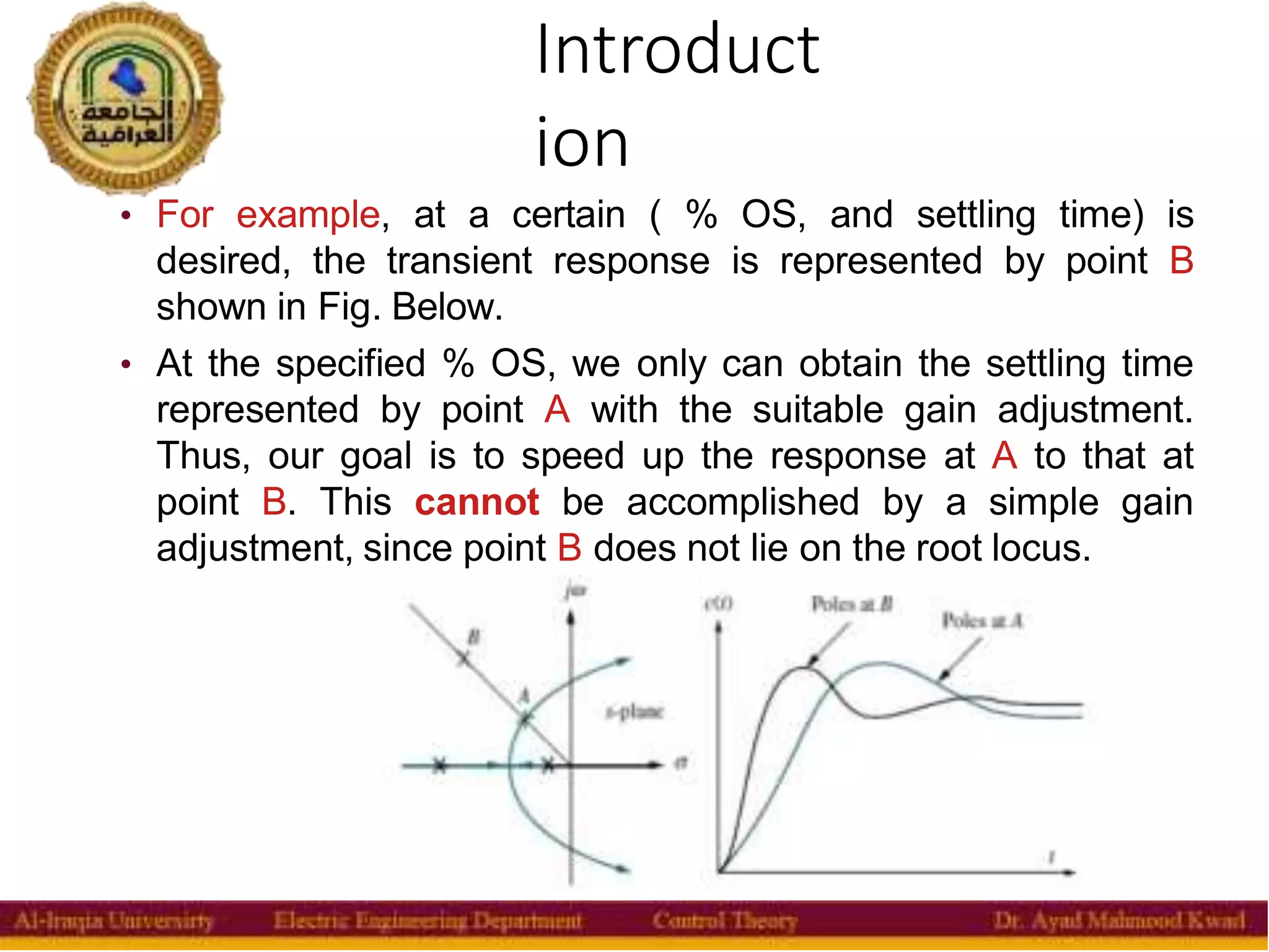
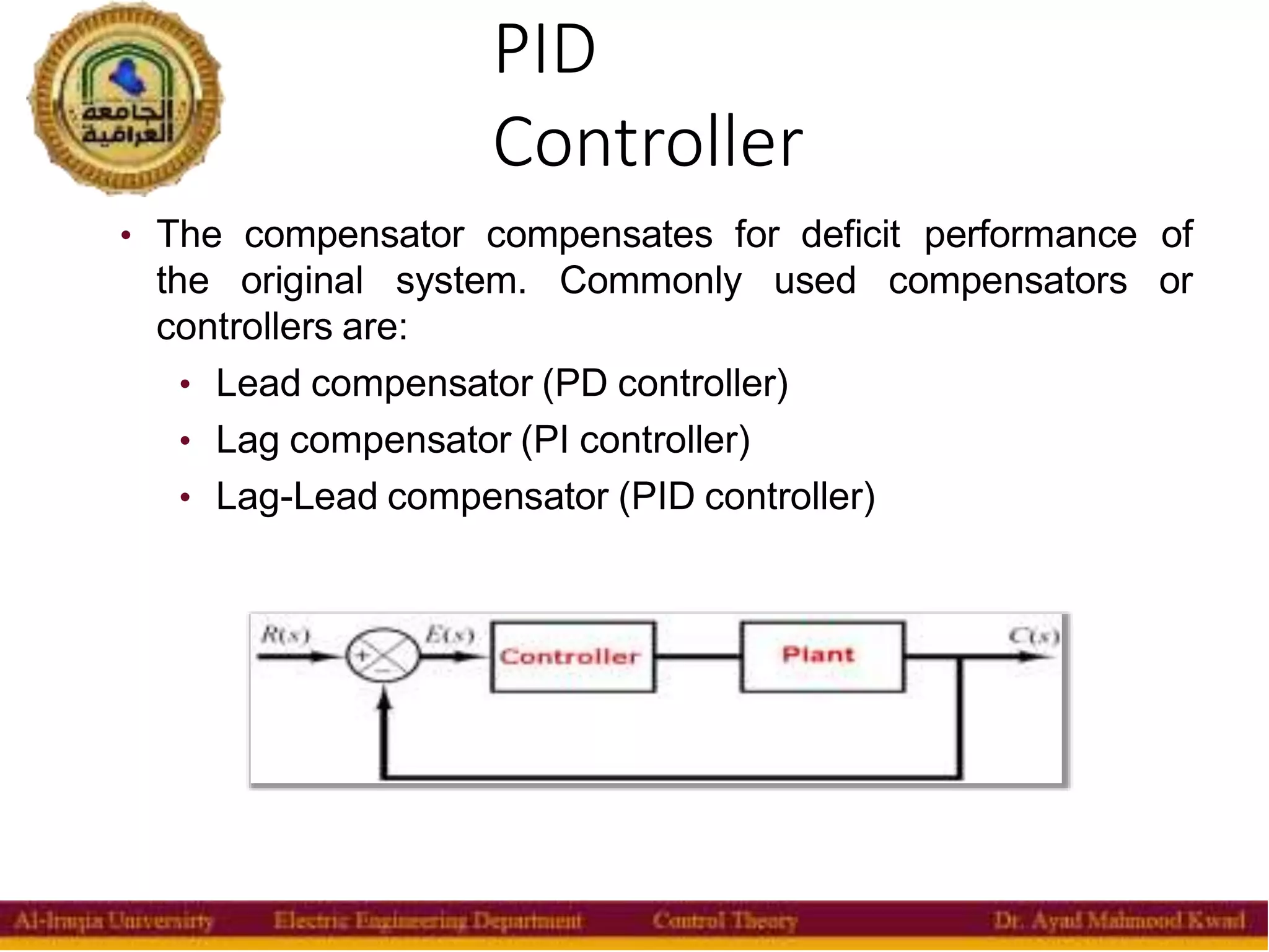
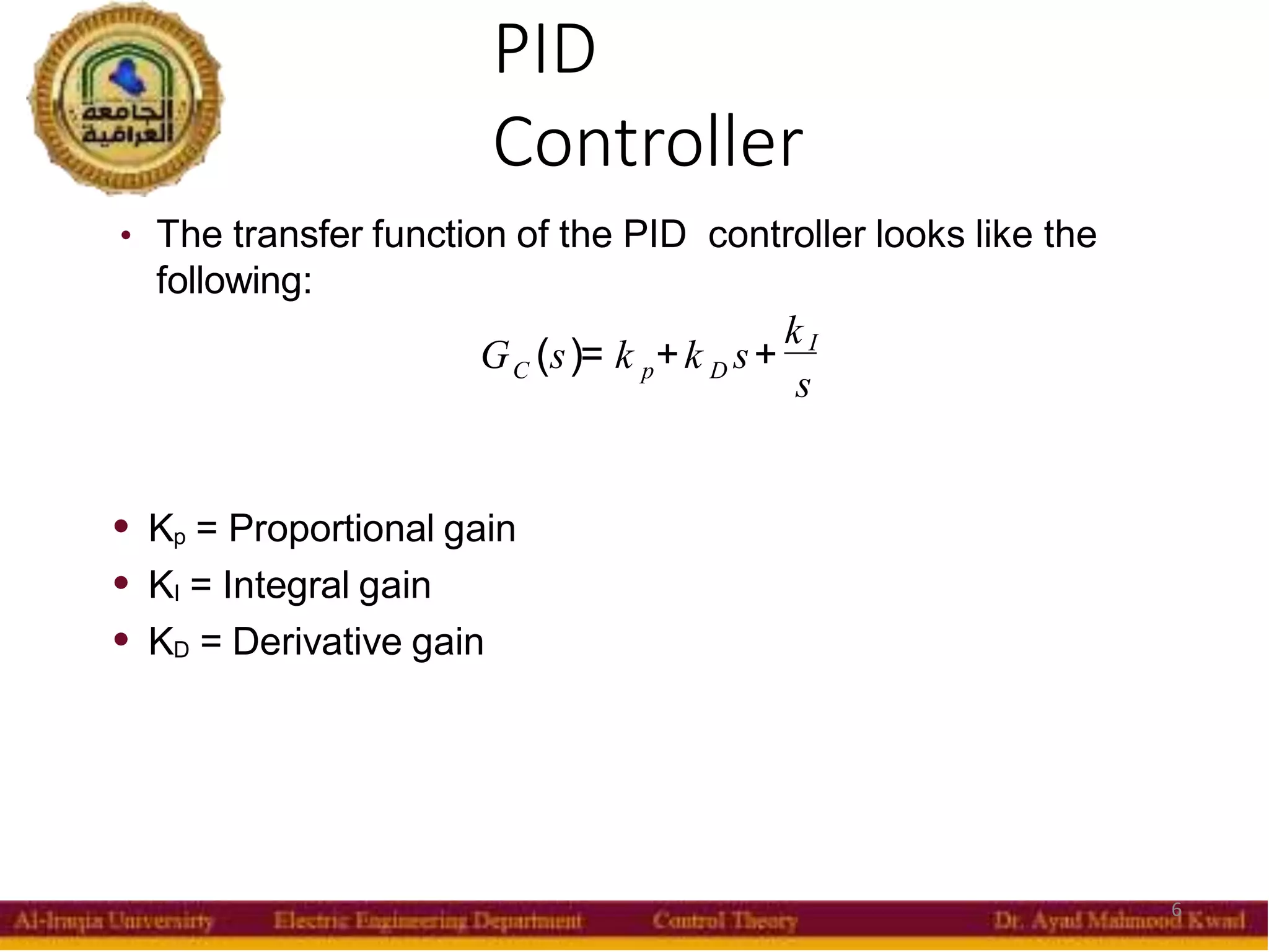
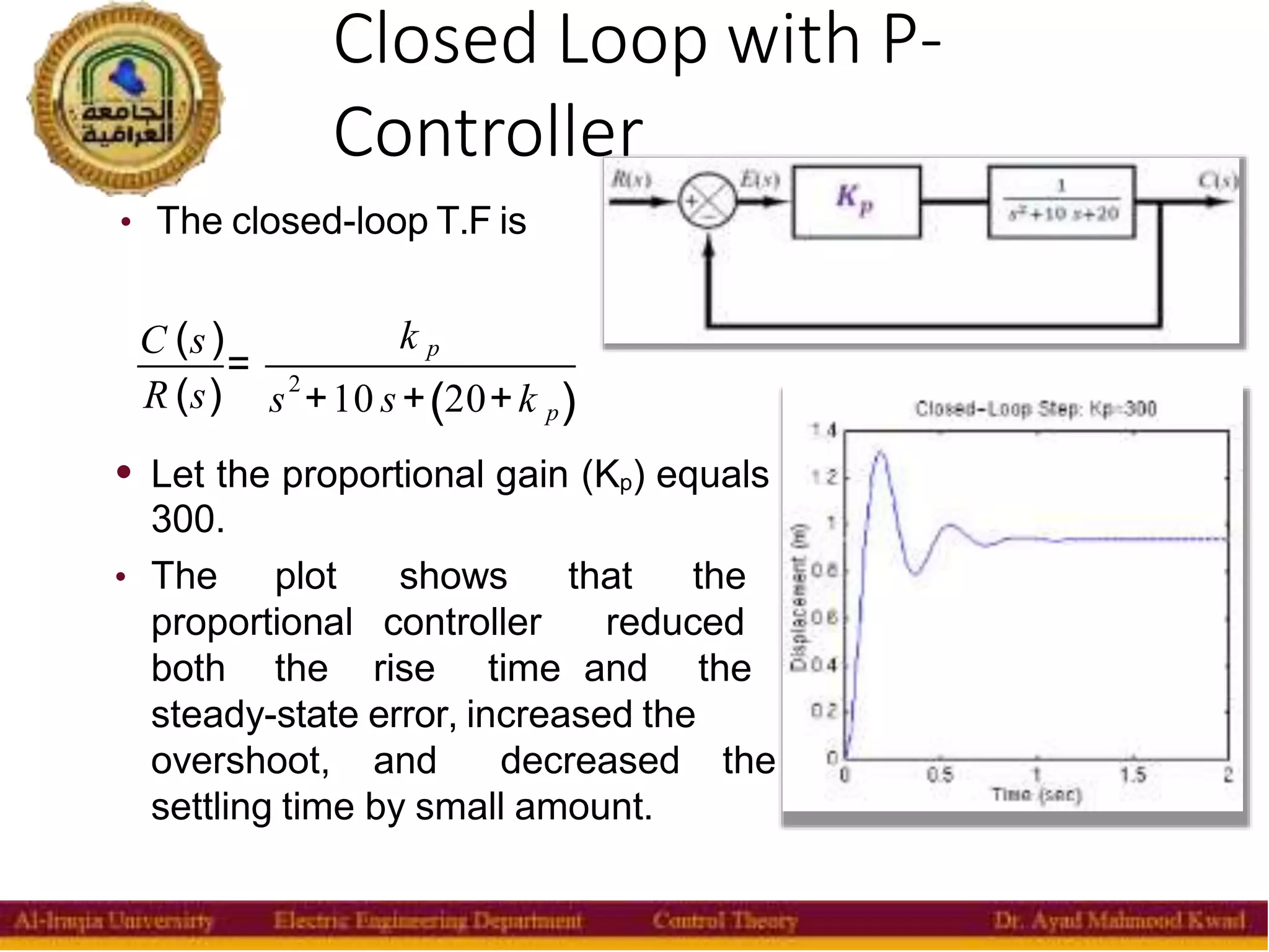
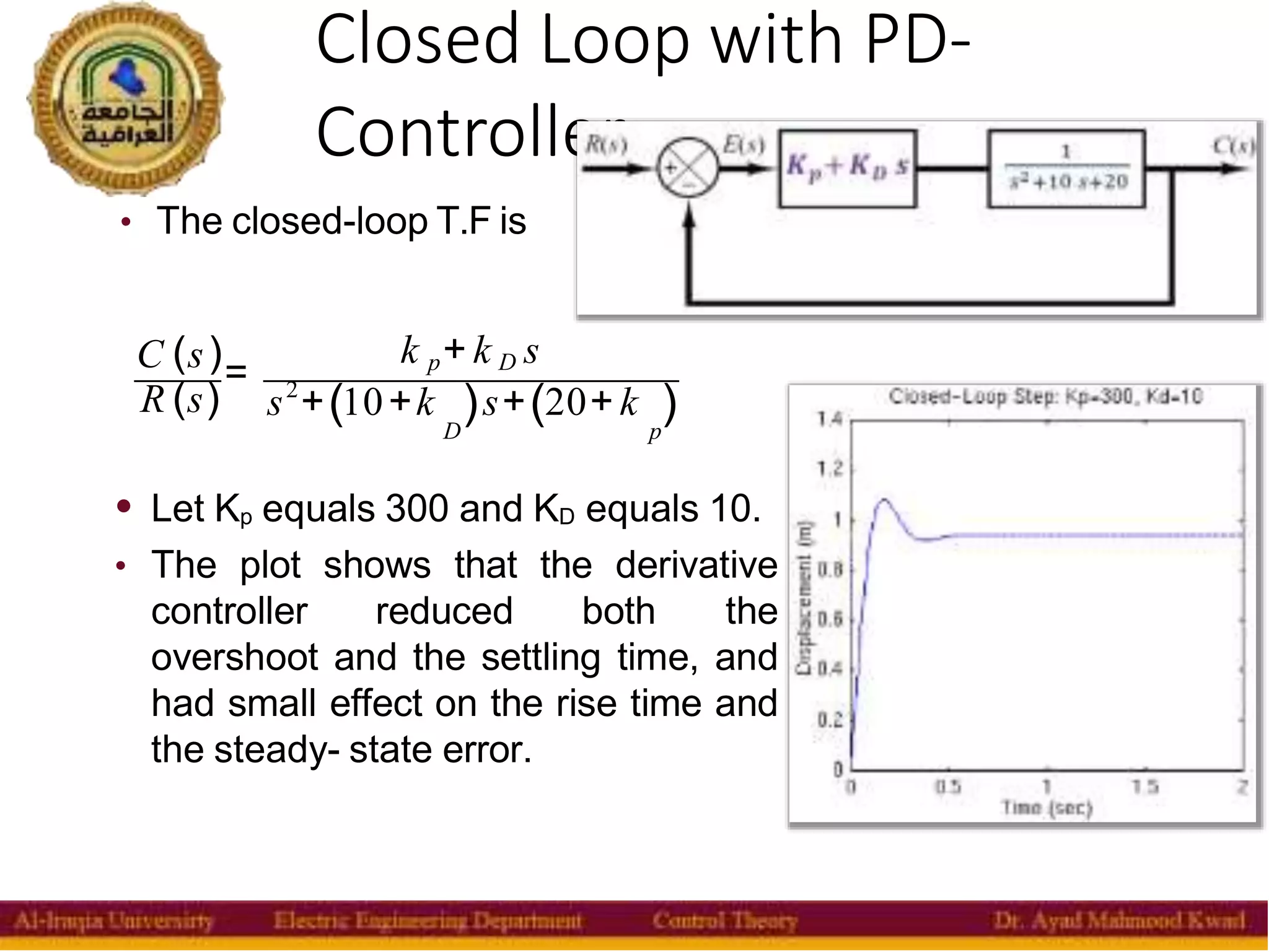
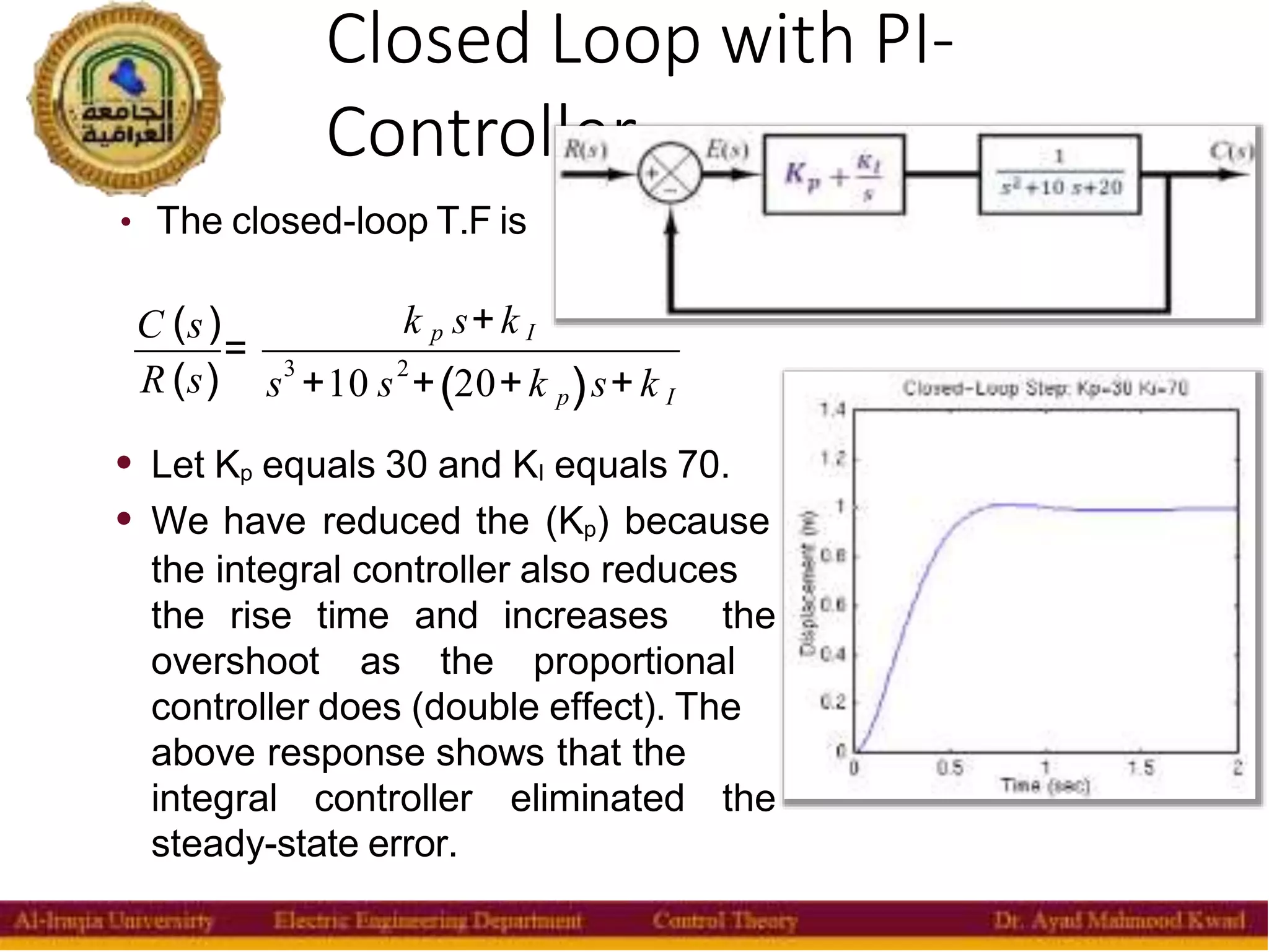
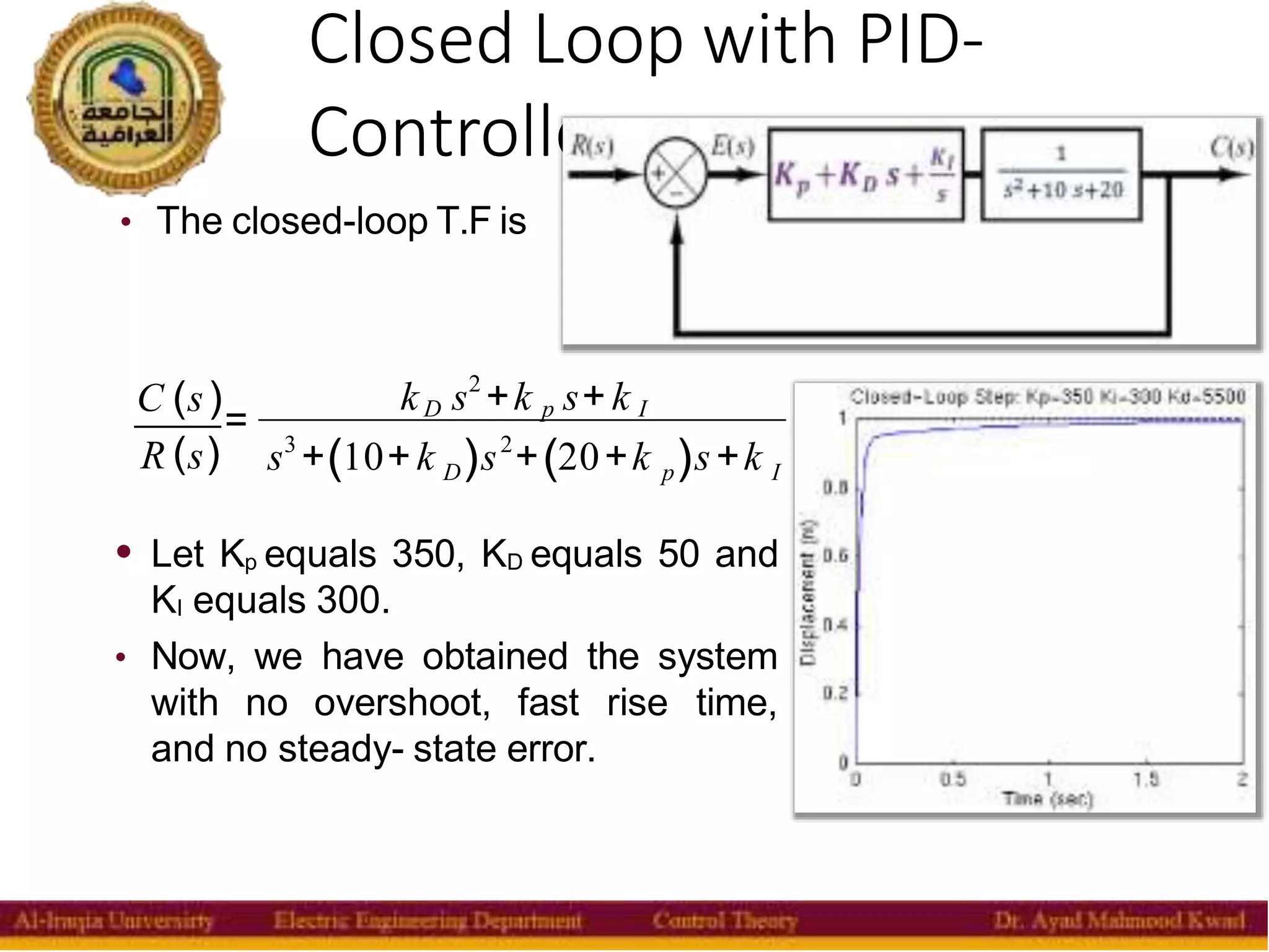
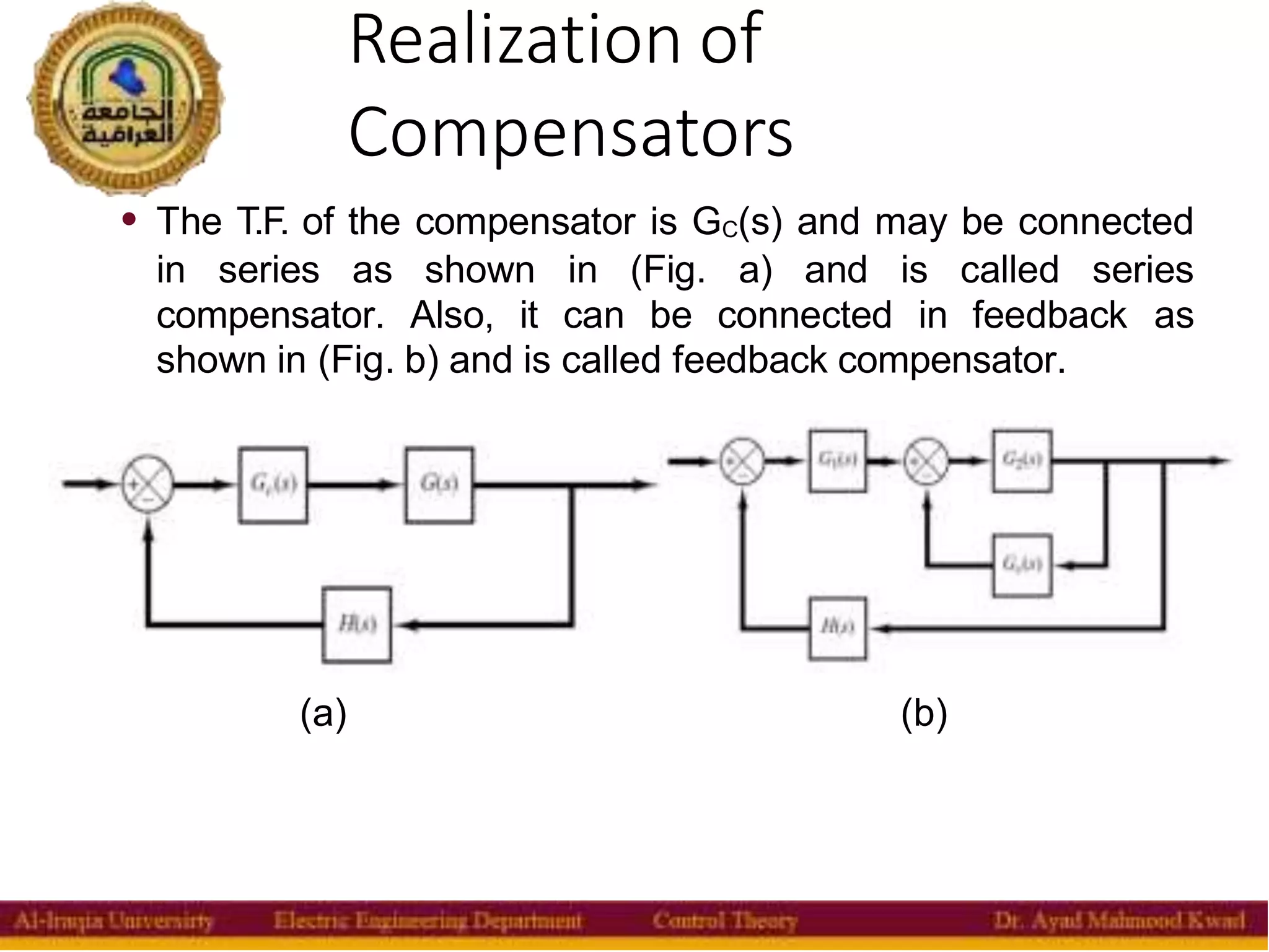
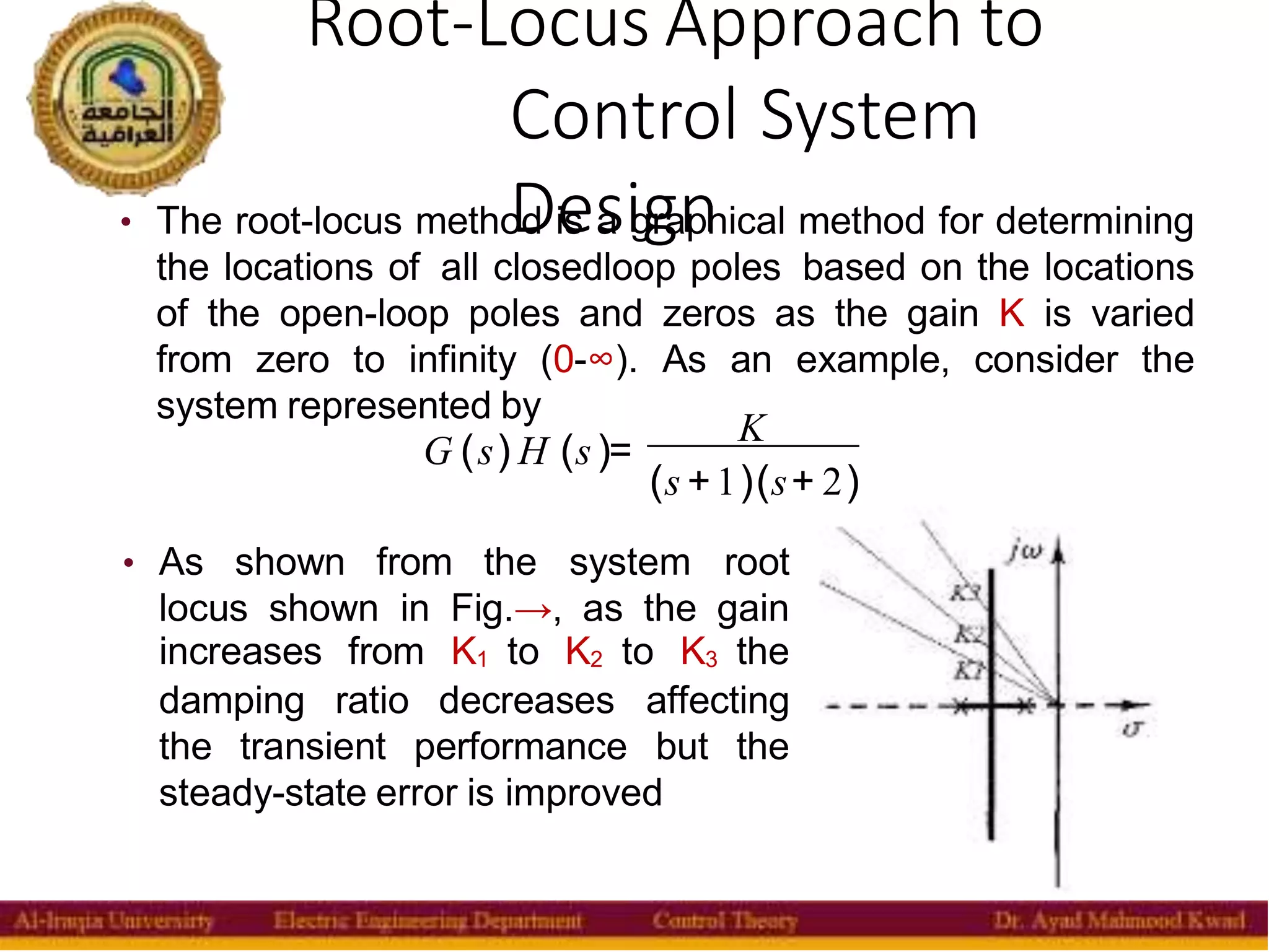
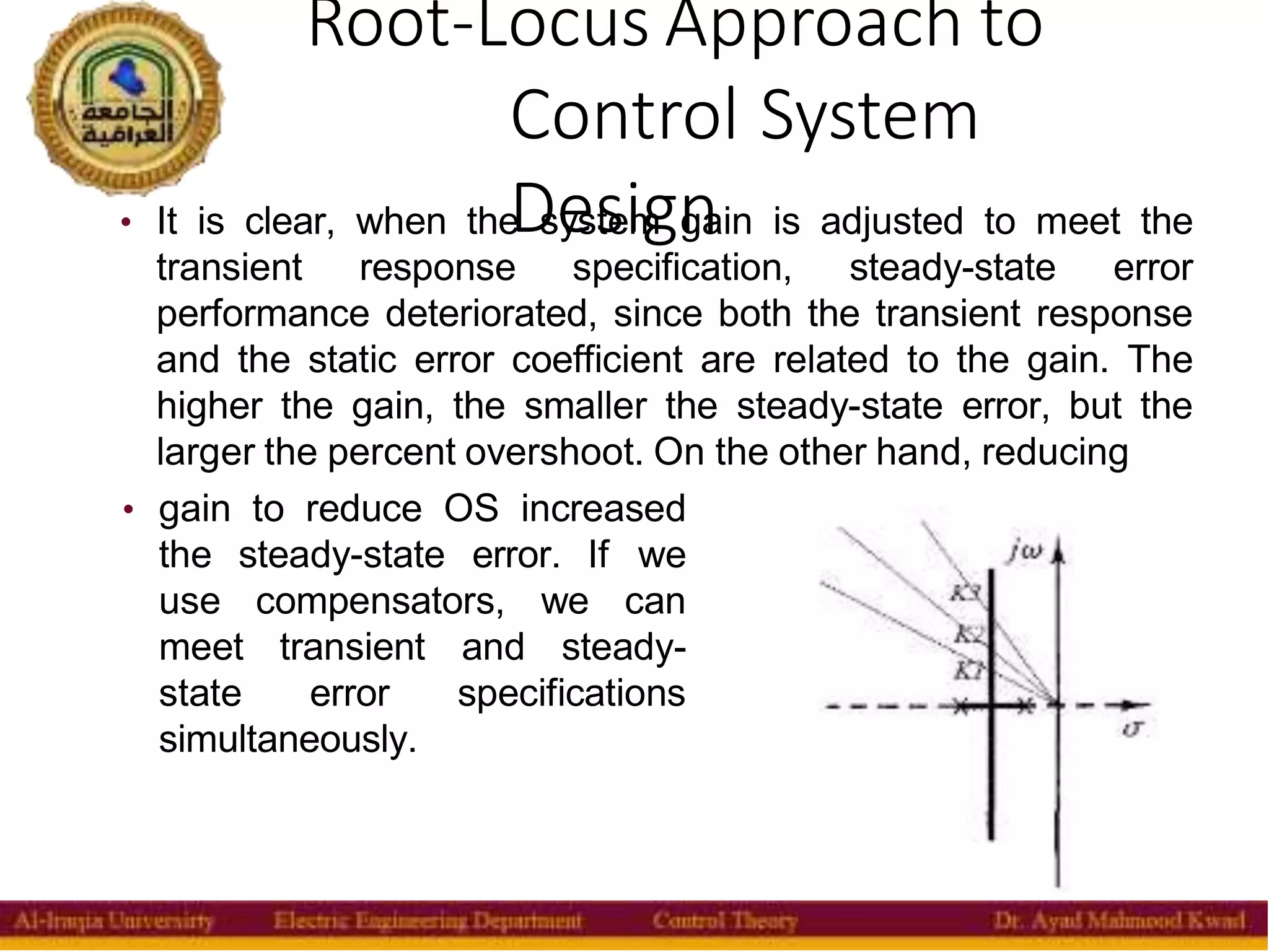
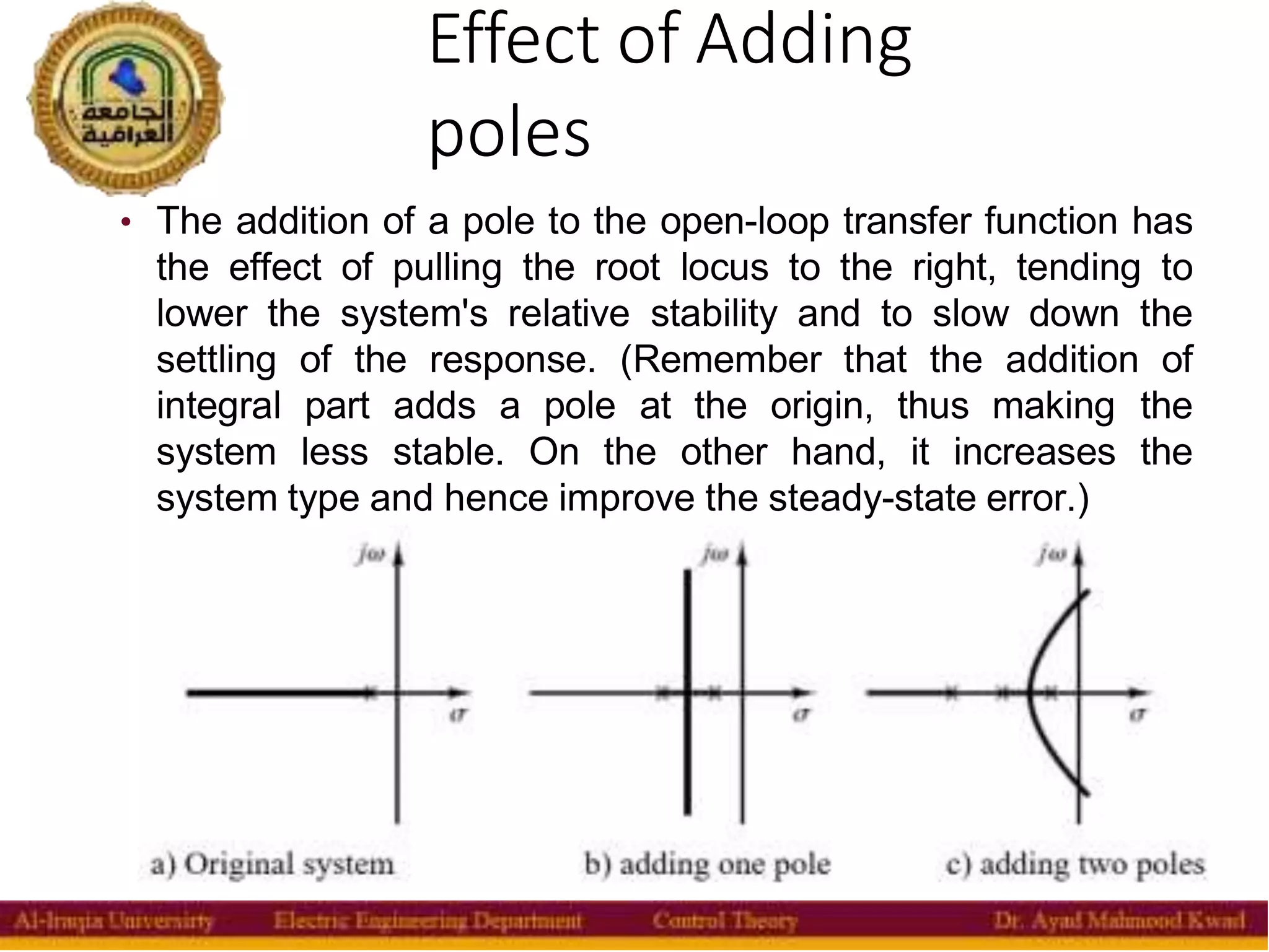
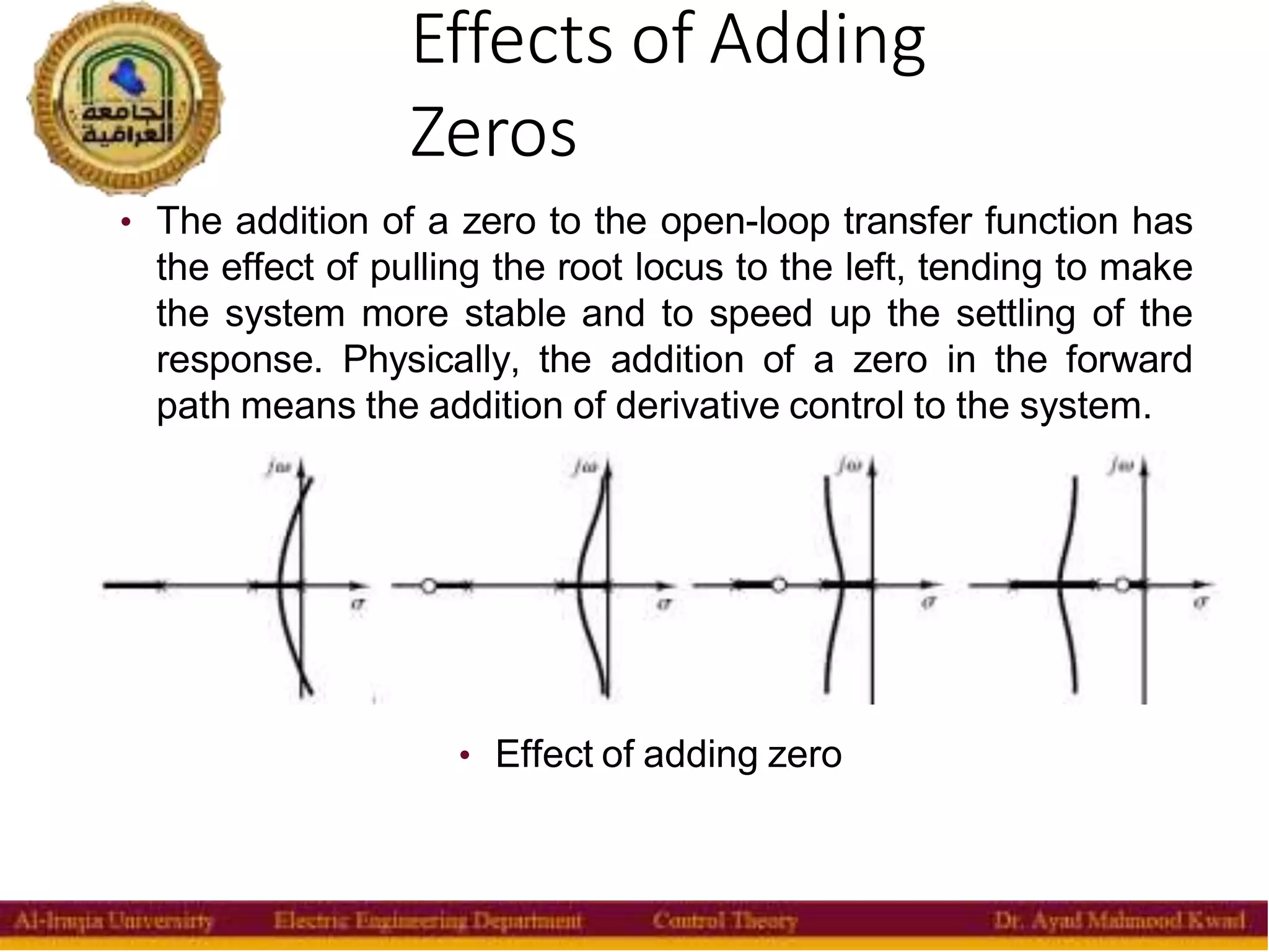
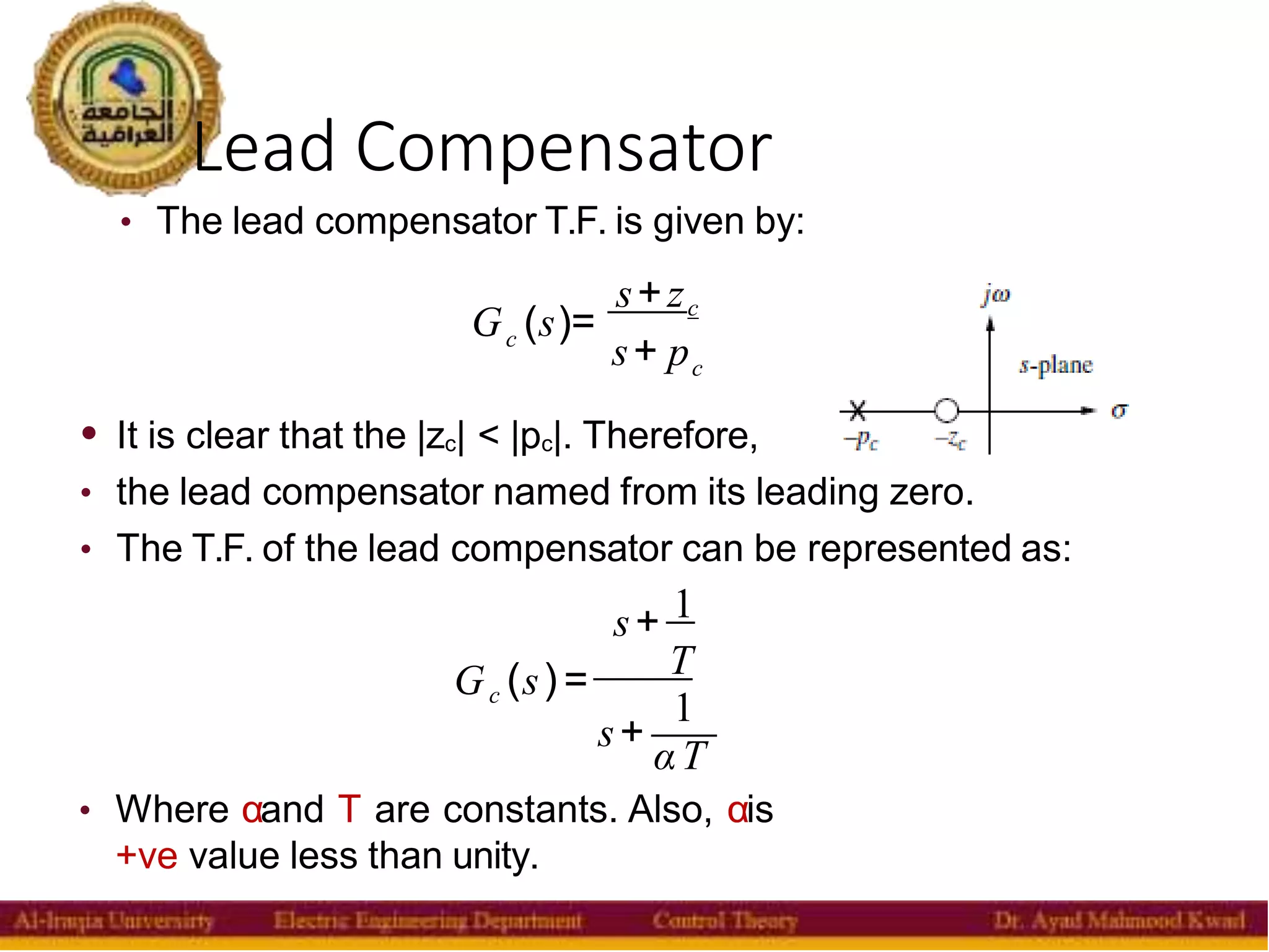
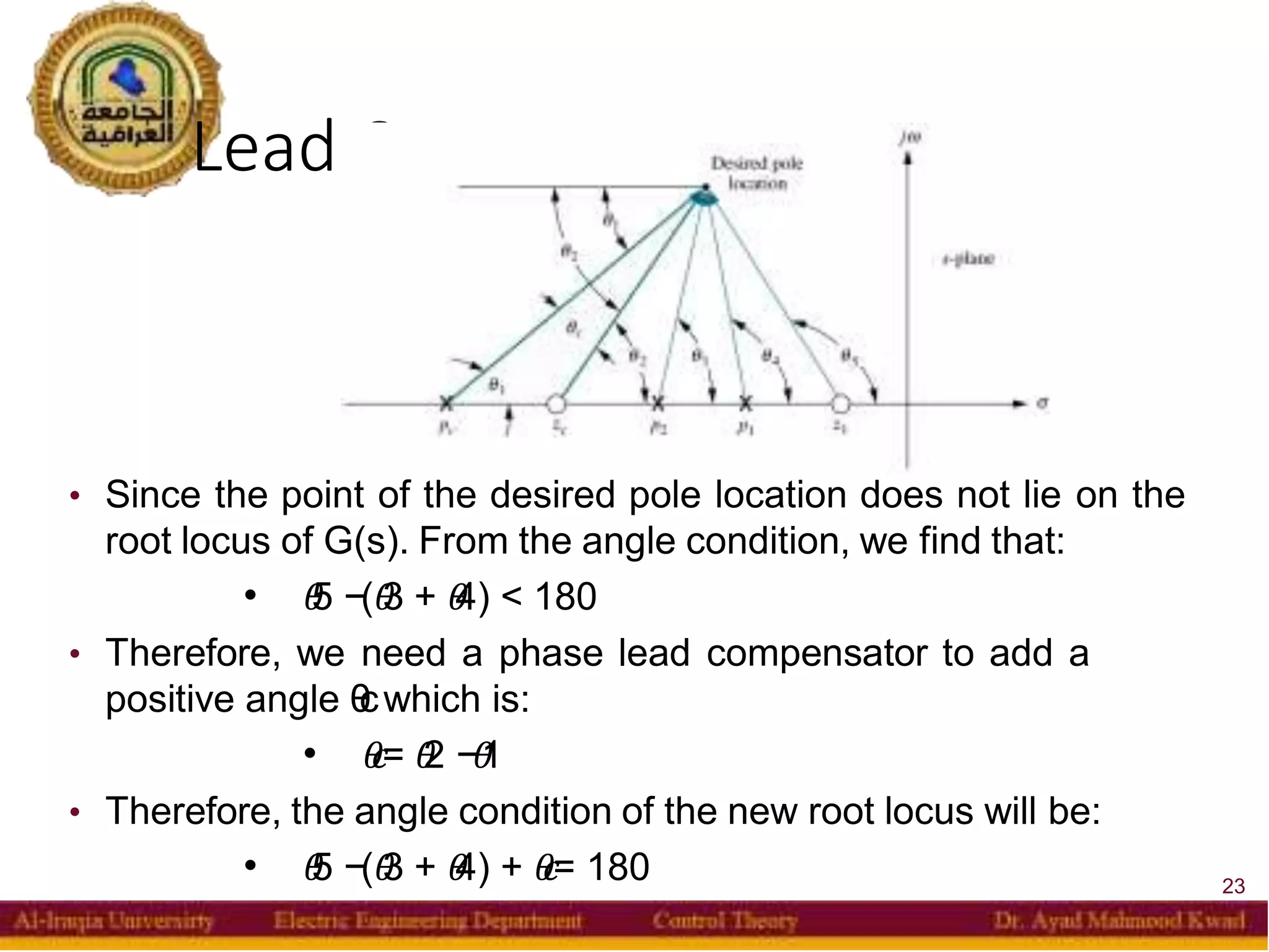
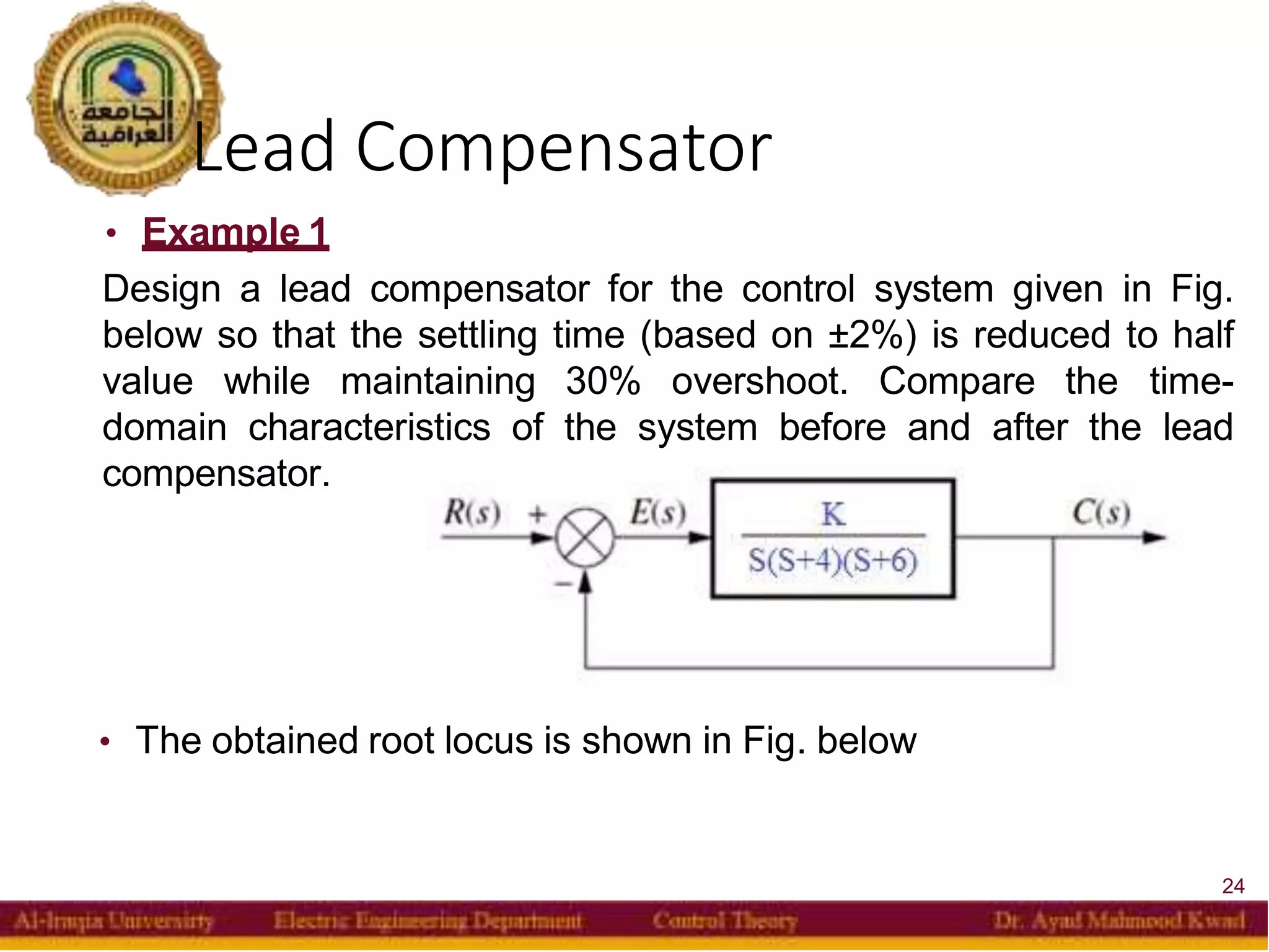
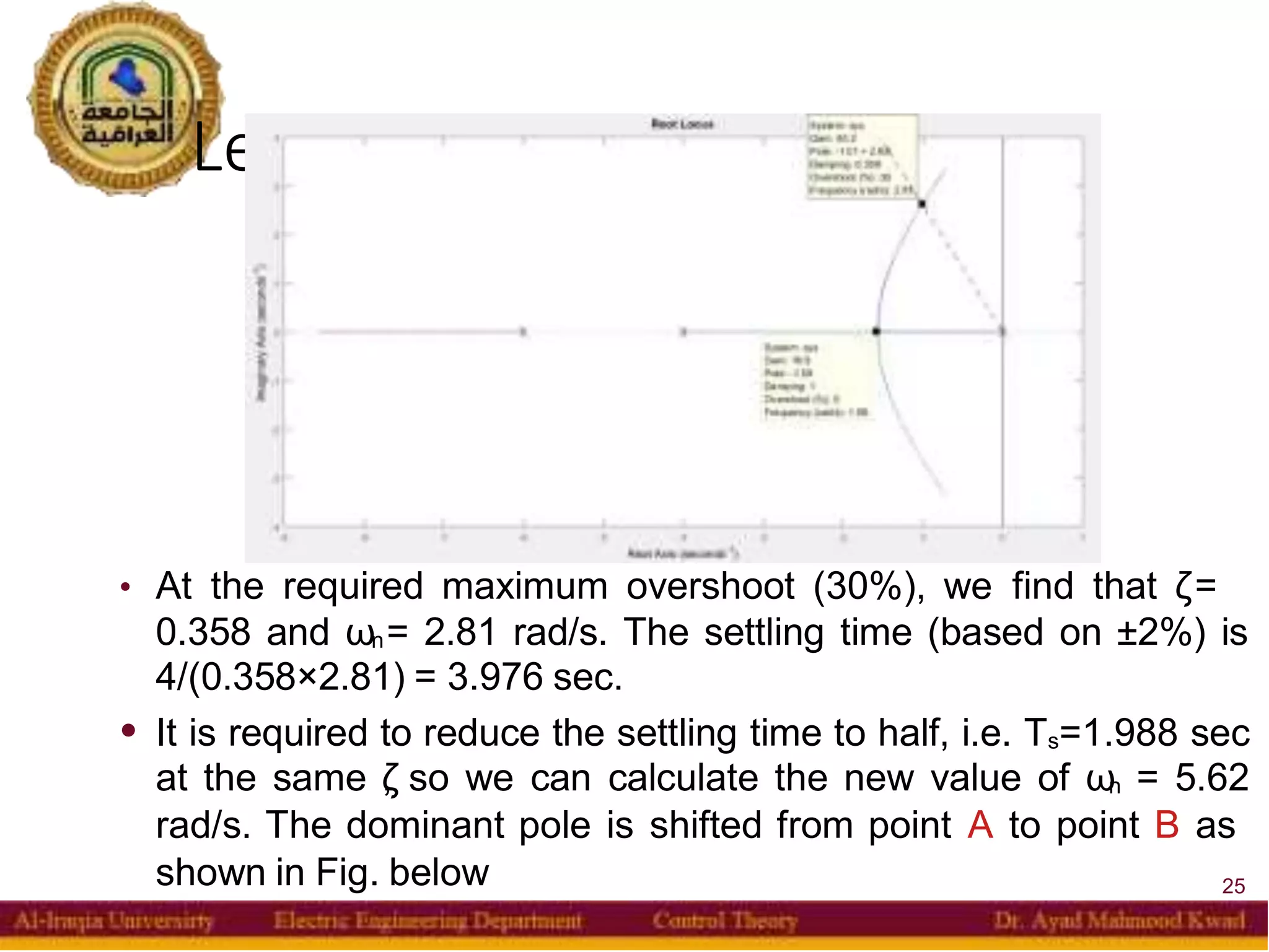
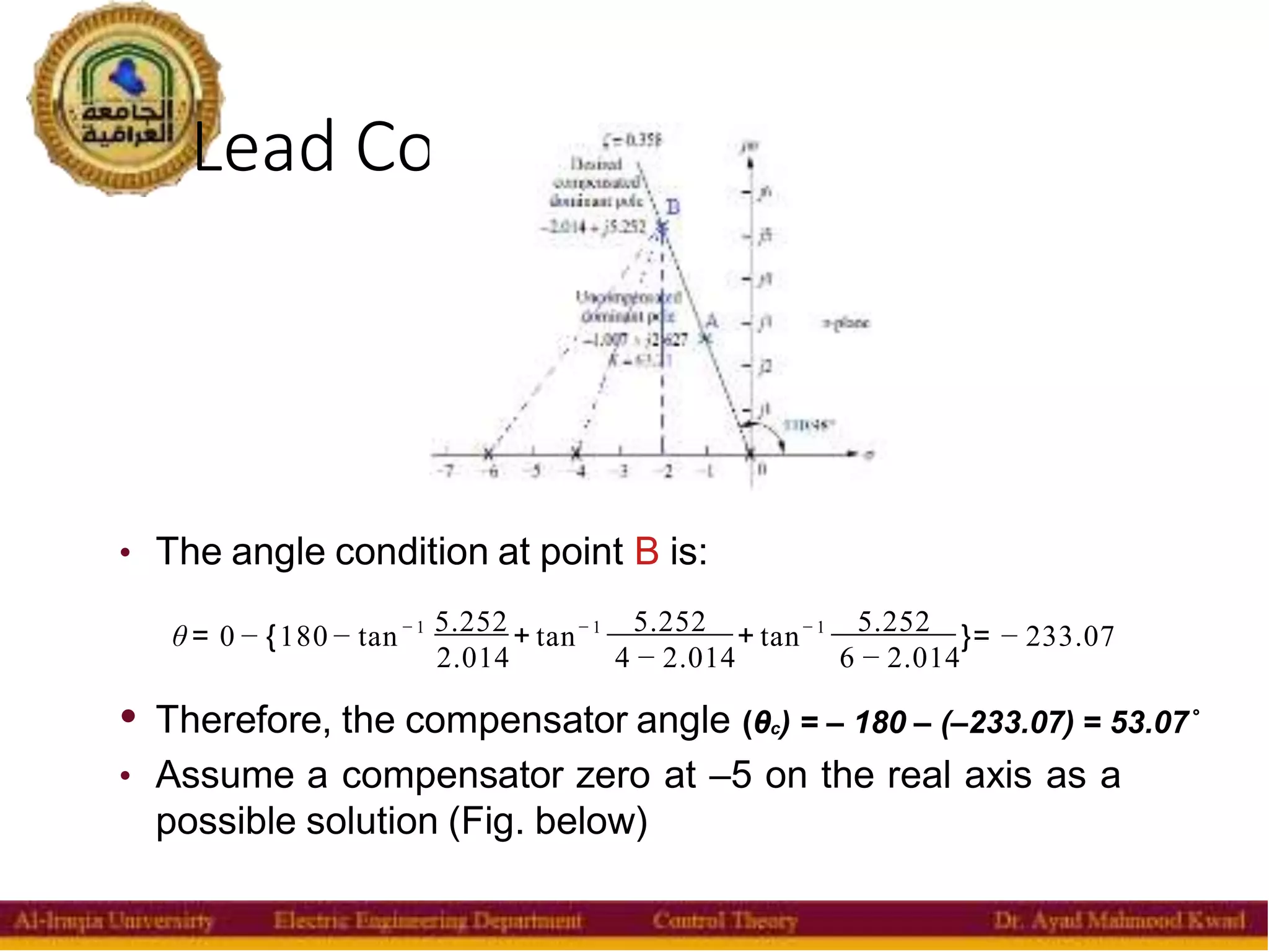
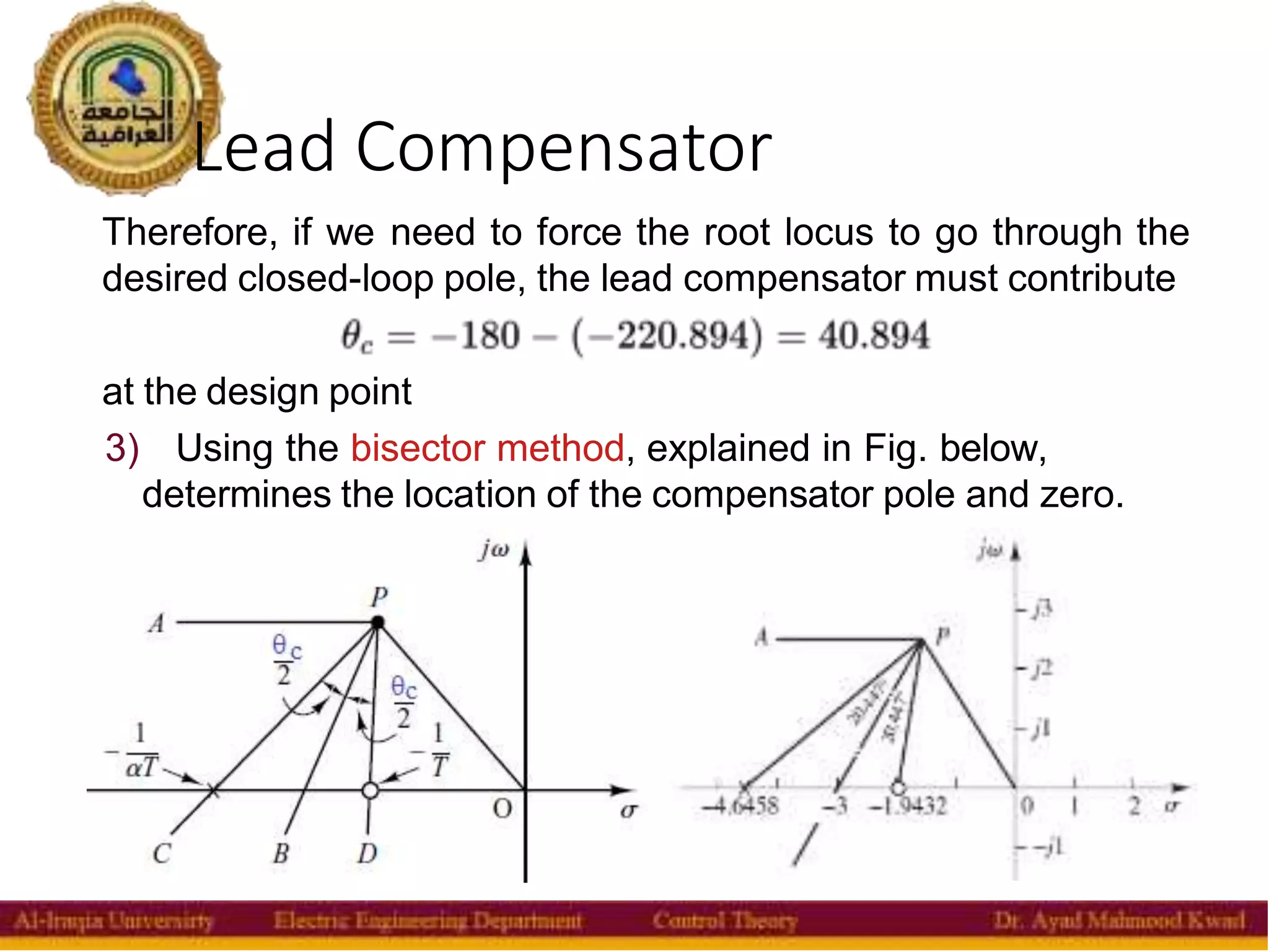
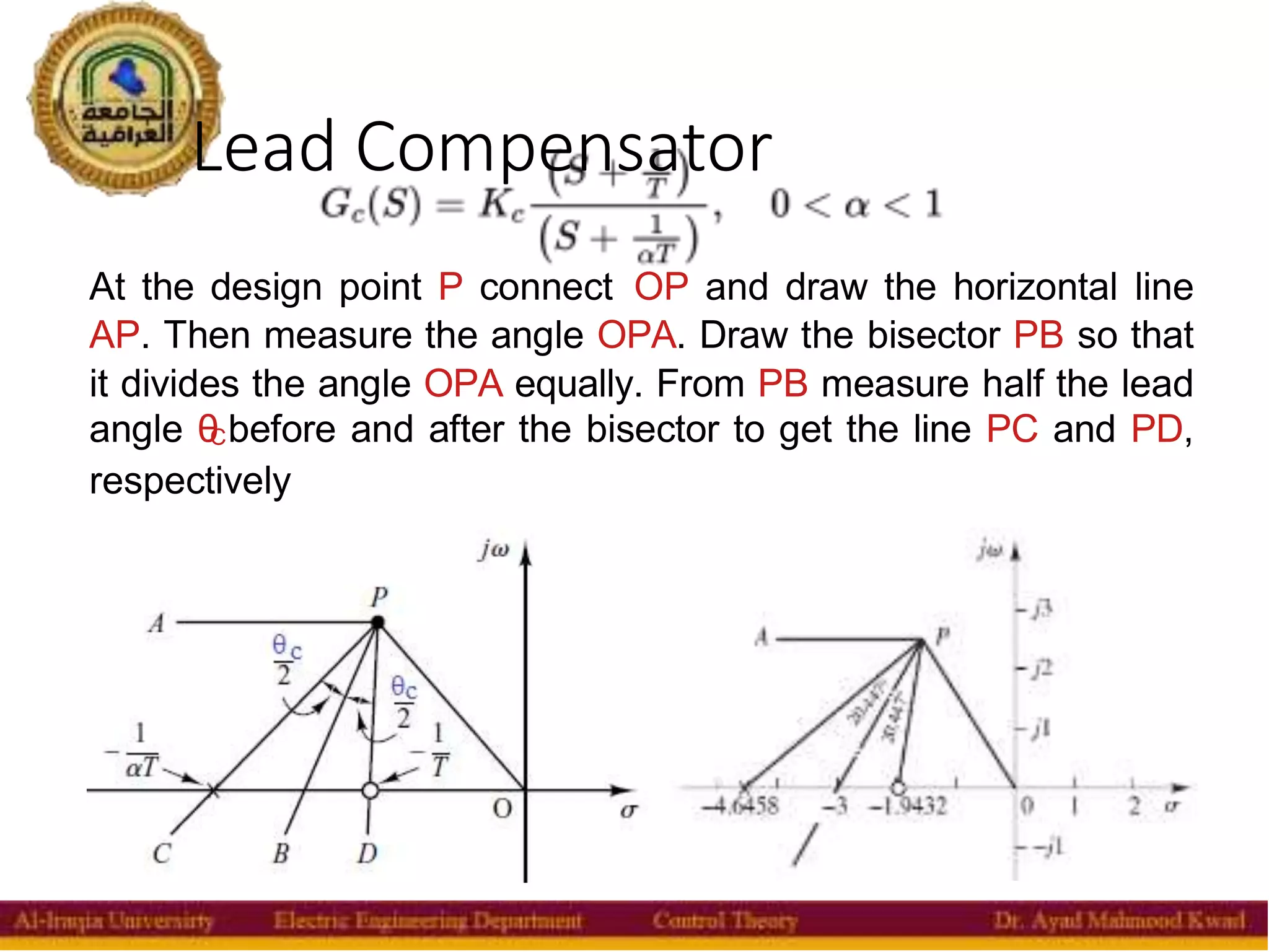
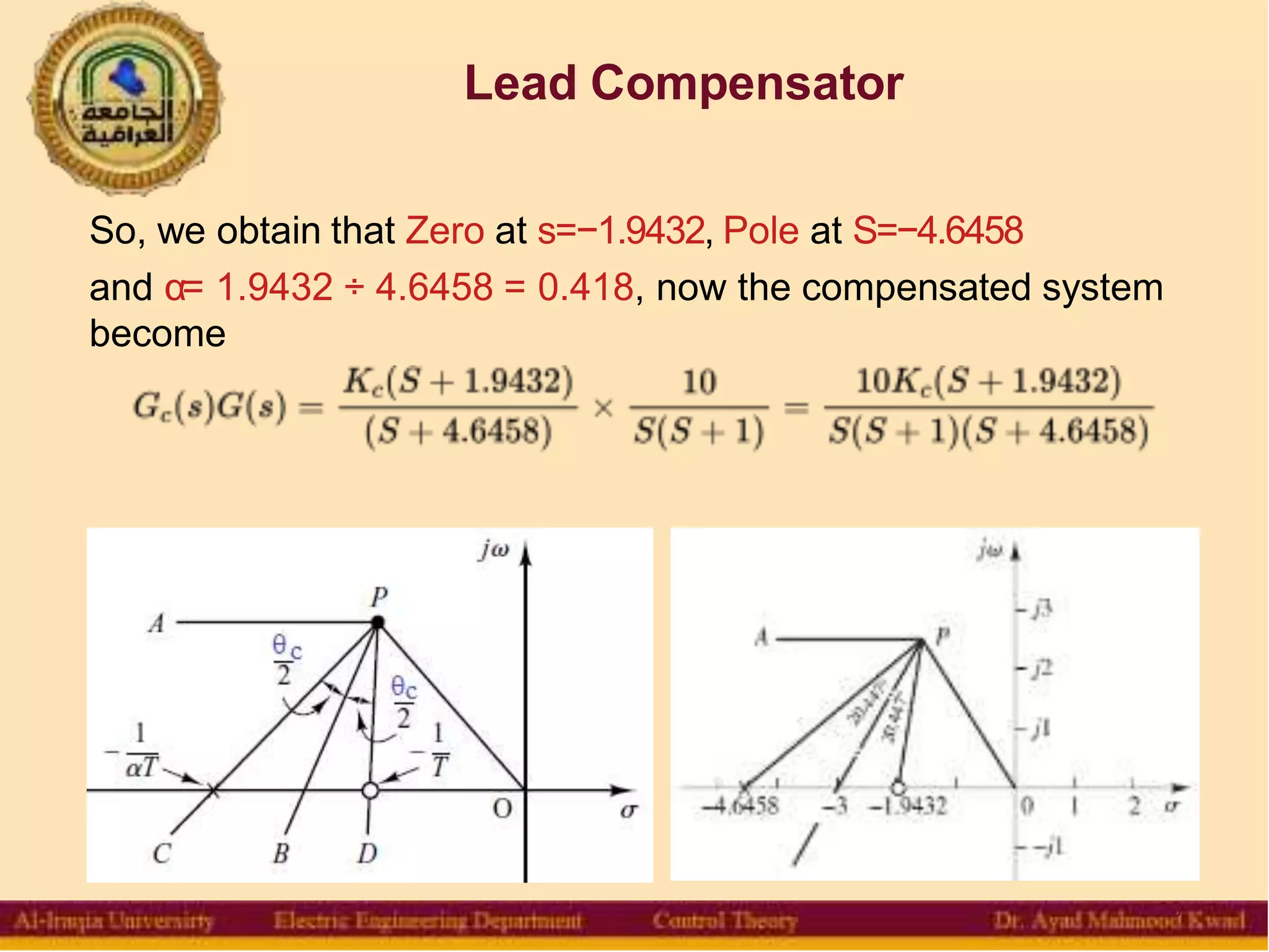
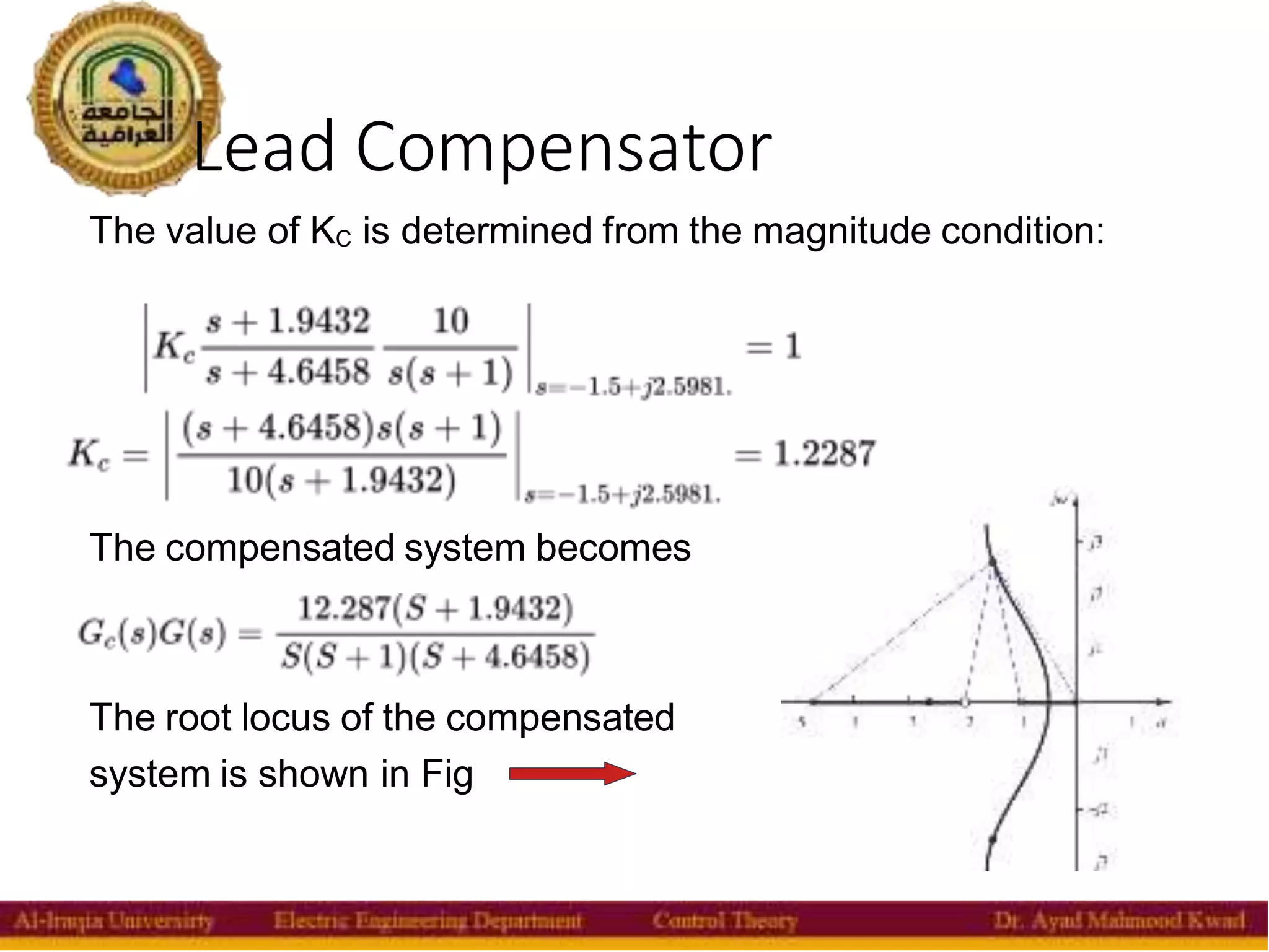
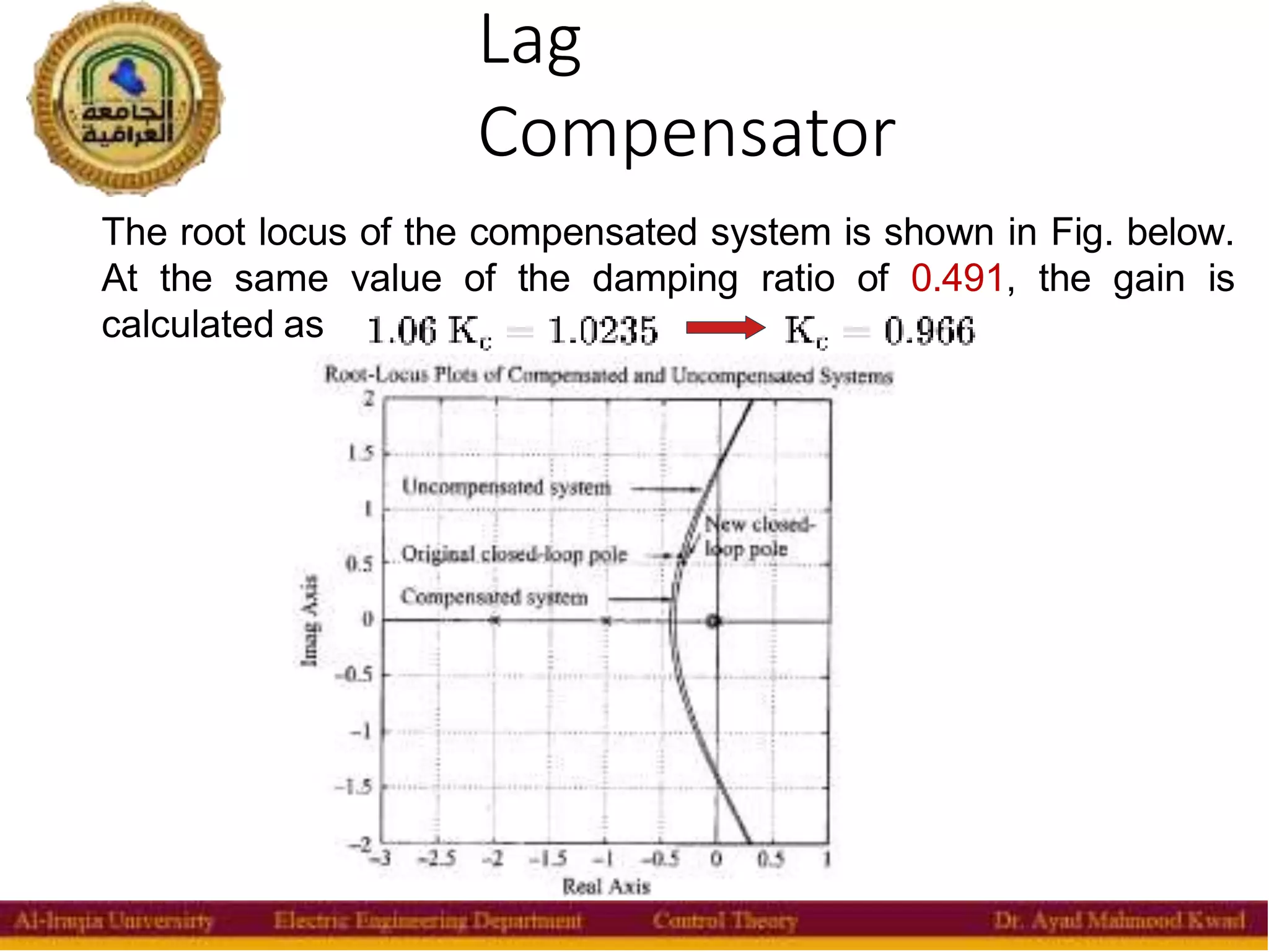

The document discusses control system design using root locus and PID tuning. It introduces root locus analysis and how adjusting the system gain can affect transient and steady-state response. PID controllers are commonly used compensators that can improve performance. The effects of proportional, integral and derivative controllers on closed-loop systems are described. An example mass-spring-damper system is analyzed with P, PI, PD and PID controllers to meet different performance specifications. Design procedures and effects of adding poles and zeros to the open-loop transfer function are also covered. Lead and lag compensators are discussed as ways to reshape the root locus to achieve desired closed-loop poles.