This document provides an overview of 2D and 3D graphics transformations including:
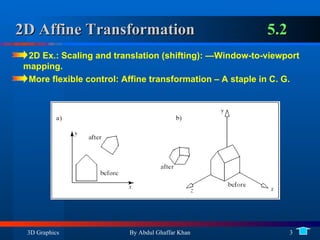
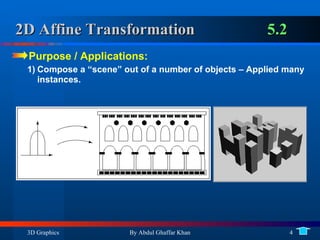
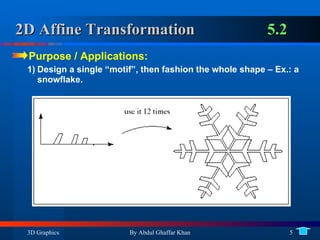
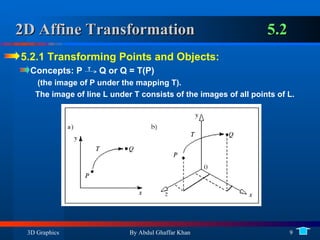
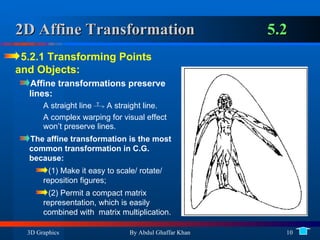
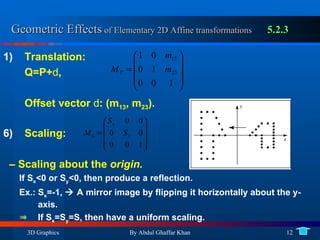
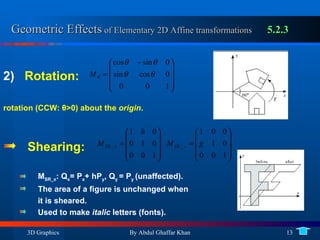
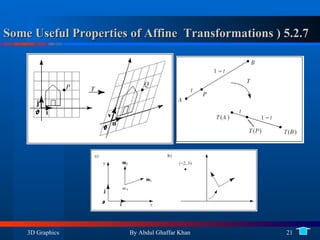
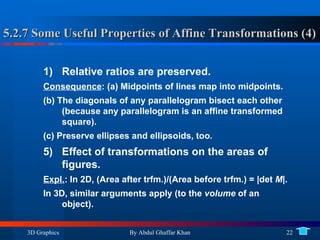
1. 2D affine transformations like translation, rotation, scaling and shearing and their properties such as preserving lines and ratios.
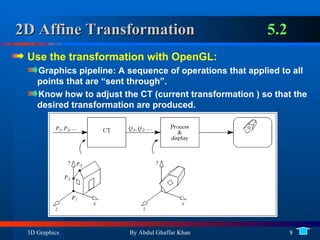
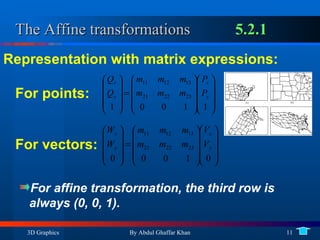
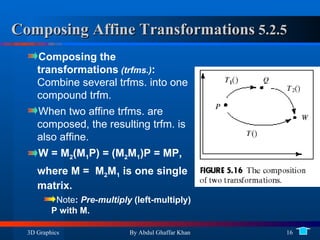
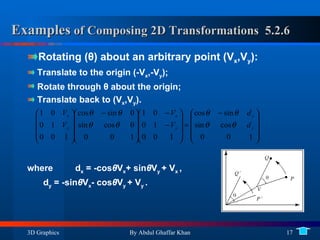
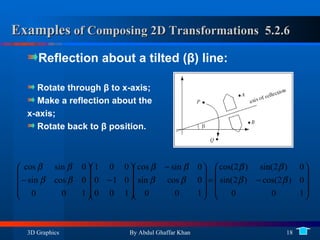
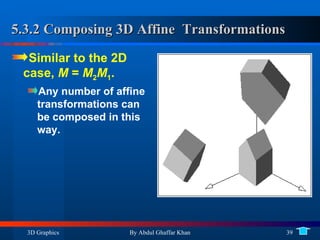
2. Representing transformations with matrices and composing multiple transformations.
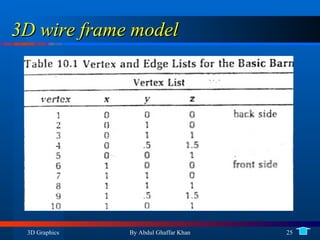
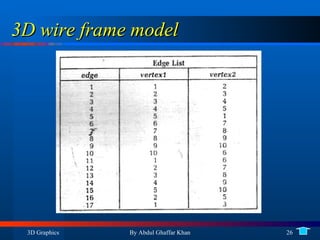
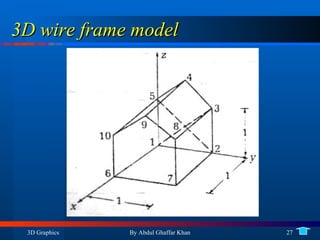
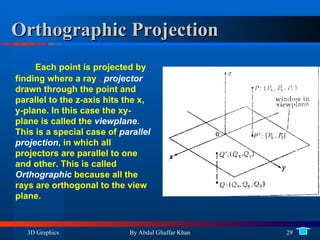
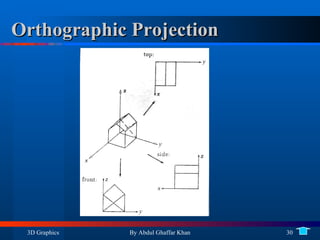
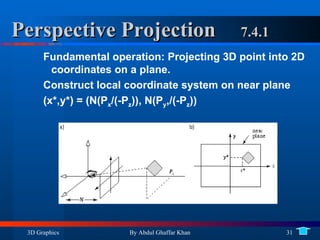
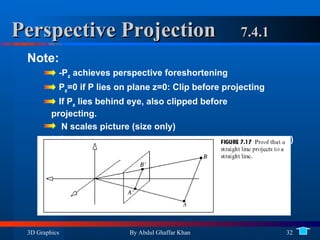
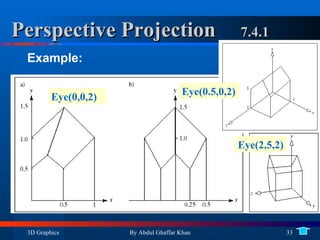
3. Drawing 3D wireframe models using projections including orthogonal and perspective projections.
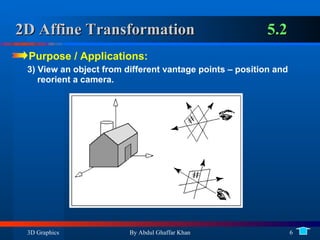
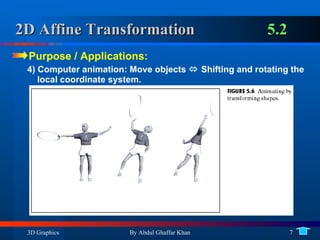
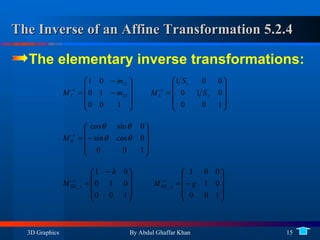
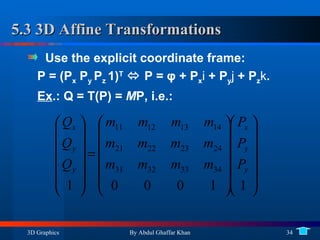
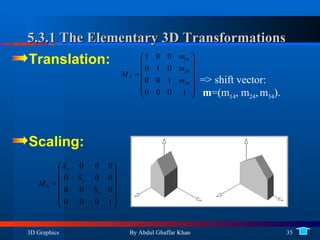
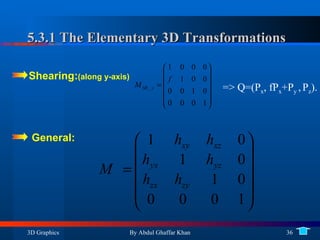
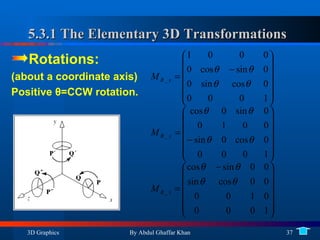
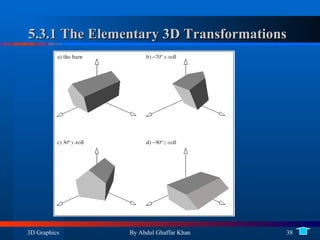
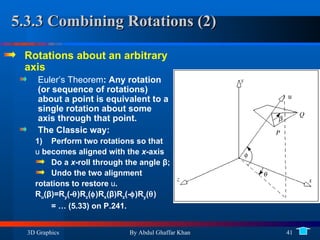
4. 3D affine transformations and their elementary forms as well as composing rotations in 3D.
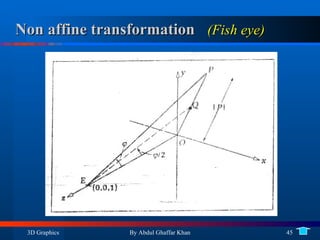
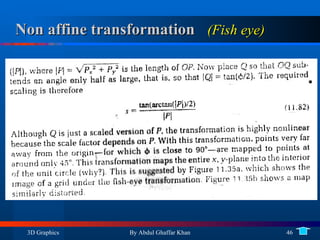
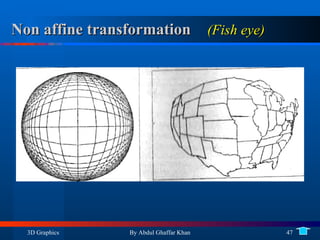
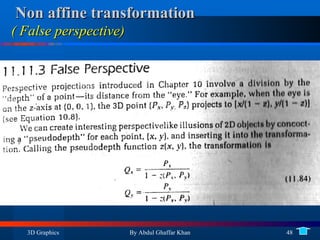
5. Non-affine transformations like fish-eye and false perspective distortions.