Downloaded 93 times



















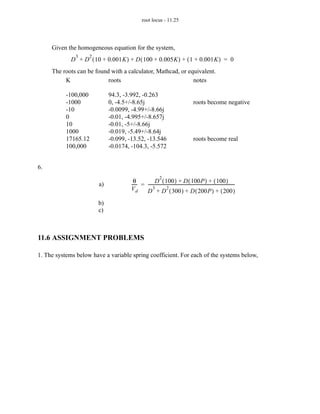
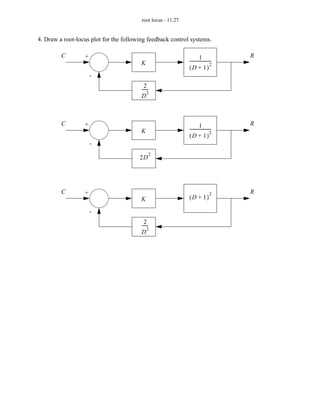

- Root-locus plots show how the roots of a system change with variations in a system parameter like gain. - The plot determines if the system will become unstable as parameters vary by checking if roots cross to the right half of the complex plane. - A document section provides examples of how real and complex roots correspond to different system responses and stability.

















































































