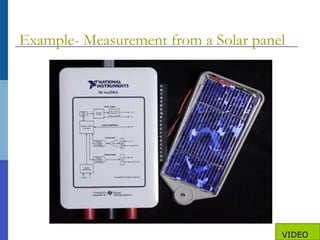
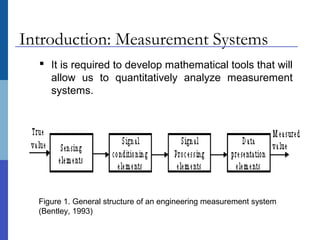
The document covers the analysis of measurement systems through time domain and frequency domain techniques. Time domain analysis focuses on the signal characteristics over time, while frequency domain analysis provides an alternative method that simplifies certain equations. An example related to voltage measurement from a solar panel is included to illustrate these concepts.
![Time Domain Analysis
For a closed loop transfer function,
C(s)/R(s)= G(s)/[1+G(s)H(s)]
Response in s-domain,
C(s) = R(s)*M(s)
Response in t-domain,
c(t) = InvLap[C(s)]](https://image.slidesharecdn.com/finalppt-131003131655-phpapp01/85/ppt-on-Time-Domain-and-Frequency-Domain-Analysis-6-320.jpg)